
本实验中,我们使用FPGA来驱动了一片DAC芯片TLC5620,该芯片的特性如下所示:
TLC5620特性:
4路8位电压输出;
单电源5V供电;
串行接口;
参考电压输入高阻;
可编程的1次或2次输出范围;
同时更新的能力;
内部自带上电复位功能;
低功耗;
半缓冲输出。
小梅哥设计的该芯片的驱动模块的接口如下所示:

各个端口定义如下:
| 以下是代码片段: input Clk; input Rst_n; input Do_DA; /*使能单次转换*/ input [10:0]Data;/*{Addr1,Addr0,Range,Data_bit[7:0]}*/ output reg DAC_Dout; /*DAC数据线*/ output reg DAC_Clk; /*DAC时钟线,最高速度1M*/ output reg DAC_LDAC; /**/ output reg DAC_LOAD; /**/ output reg DA_Done; /*单次转换完成标志信号*/ |
该芯片提供了类似于SPI的数字接口,因此,我们只需要使用该接口与芯片进行通信,再配合LOAD和LDAC两个控制线,即可实现对该DAC芯片的控制。TLC5620一次转换的操作时序如下:

图1 TLC5620单次转换时序图
TLC5620每次写入的数据为11位,其中前两位为DAC选择位A1、A0,通过不同的组合可以选择不同通道的DAC,具体分配为:
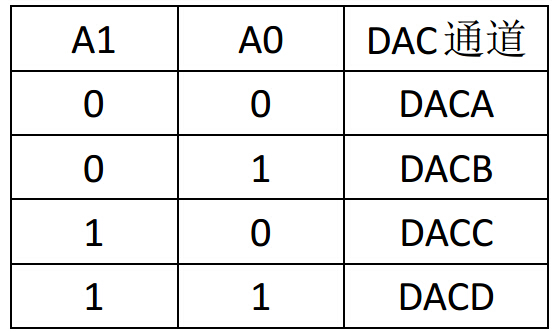
表1 DAC通道选择位与对应通道关系
第三位是电压输出增益位,0代表不变,1代表两倍,当设定参考电压为2.5V时,取这一位为1就可以得到最高5V的输出电压。后面8位是数据位,其中第四位是数据的最高位。对于TLC5620的输出电压公式是:
VO=VREF ×CODE/256×(1+RNG)
VREF是参考电压,CODE是待转换的8位二进制代码,RNG是增益倍数。
写入数据时,首先LOAD和LDAC写高电平,这样在CLK的每个下降沿写入的每位数据被锁存到DATA端,当11位数据传送完毕后,拉低LOAD,芯片根据前两位数据,判断是哪一路DAC通道,然后将8位数据移入相应的通道,进行DA转换,这时拉低LDAC,再拉高LDAC,就可以再下次转化之前,保持此次的模拟输出。
TLC5620正常工作时的具体电压和时间参数如下表所示,通过该表,可知该芯片串行数字接口的时钟信号(CLK)最高为1MHz。该参数将作为我们采用FPGA产生TLC5620数字接口时钟的依据。同时,还有输入数据建立时间tsu(data-clk)为50ns,即,FPGA数据送出,到能够被TLC5620正常读取,至少需要50ns,因此FPGA单位数据输出保持时间不得少于50ns。tv(data-clk)为时钟下降沿到来后多久时间数据线上的数据才能被芯片内部采集,该时间确定了,时钟下降沿出现多久后,数据线上的数据可以被更新。tsu(LOAD-LDAC)为LOAD的上升沿到LDAC下降沿的建立时间,这里最小为0ns,因此忽略,即两者同时发生即可。tw(LDAC)为LDAC低电平所需的最短时间,为250ns。

表2 TLC5620关键参数
通过对TLC5620一次完整转换的时序进行分析,列出以下序列机对应的序列点:该序列机总共包含26个点,其中,当Cnt1=0(ST0)时,为空闲态,ST1—ST22为数据发送状态,ST23时拉低LOAD,即将数据加载入对应通道的DAC中,ST24时释放LOAD,同时拉低LDAC,以产生LDAC的下降沿,将对应通道的模拟输出保持住。ST25拉高LDAC,完成一次转换。
|
ST0 |
Cnt1 == 0 |
DAC_Dout = 1; DAC_Clk = 0; DAC_LOAD = 1; DAC_LDAC = 1; DA_Done = 1; |
|
ST1 |
Cnt1 == 1 |
DAC_Dout = Data_r[10]; DAC_Clk = 1; DA_Done = 0; |
|
ST2 |
Cnt1 == 2 |
DAC_Clk = 0; |
|
ST3 |
Cnt1 == 3 |
DAC_Dout = Data_r[9]; DAC_Clk = 1; |
|
ST4 |
Cnt1 == 4 |
DAC_Clk = 0; |
|
ST5 |
Cnt1 == 5 |
DAC_Dout = Data_r[8]; DAC_Clk = 1; |
|
ST6 |
Cnt1 == 6 |
DAC_Clk = 0; |
|
ST7 |
Cnt1 == 7 |
DAC_Dout = Data_r[7]; DAC_Clk = 1; |
|
ST8 |
Cnt1 == 8 |
DAC_Clk = 0; |
|
ST9 |
Cnt1 == 9 |
DAC_Dout = Data_r[6]; DAC_Clk = 1; |
|
ST10 |
Cnt1 == 10 |
DAC_Clk = 0; |
|
ST11 |
Cnt1 == 11 |
DAC_Dout = Data_r[5]; DAC_Clk = 1; |
|
ST12 |
Cnt1 == 12 |
DAC_Clk = 0; |
|
ST13 |
Cnt1 == 13 |
DAC_Dout = Data_r[4]; DAC_Clk = 1; |
|
ST14 |
Cnt1 == 14 |
DAC_Clk = 0; |
|
ST15 |
Cnt1 == 15 |
DAC_Dout = Data_r[3]; DAC_Clk = 1; |
|
ST16 |
Cnt1 == 16 |
DAC_Clk = 0; |
|
ST17 |
Cnt1 == 17 |
DAC_Dout = Data_r[2]; DAC_Clk = 1; |
|
ST18 |
Cnt1 == 18 |
DAC_Clk = 0; |
|
ST19 |
Cnt1 == 19 |
DAC_Dout = Data_r[1]; DAC_Clk = 1; |
|
ST20 |
Cnt1 == 20 |
DAC_Clk = 0; |
|
ST21 |
Cnt1 == 21 |
DAC_Dout = Data_r[0]; DAC_Clk = 1; |
|
ST22 |
Cnt1 == 22 |
DAC_Clk = 0; |
|
ST23 |
Cnt1 == 23 |
DAC_LOAD = 0; |
|
ST24 |
Cnt1 == 24 |
DAC_LOAD = 1; DAC_LDAC = 0; |
|
ST25 |
Cnt1 == 25 |
DAC_LDAC = 1; DA_Done = 1; |
表3 TLC5620单次转换控制序列机
序列机的计数器计数条件如下,
|
Cnt_state == 0 | Cnt1 == 25 |
Cnt1 <= 0; |
|
Cnt_state == 1 & Cnt1 < 25 |
Cnt1 <= Cnt1 + 1’b1 |
表4 TLC5620序列机计数器计数条件
线性序列机计数器Cnt1的控制代码如下:
| 以下是代码片段: always @(posedge Clk or negedge Rst_n) if(!Rst_n) Cnt1 <= 5'd0; else if(Cnt_State == DO_CNT) begin if(Cnt1 == 5'd25) Cnt1 <= 5'd0; else if(Cnt2 == Cnt2_Top) Cnt1 <= Cnt1 + 1'b1; else Cnt1 <= Cnt1; end else Cnt1 <= 5'd0; |
其中,涉及到了两个状态,当Cnt_State = 0时,表示没有转换请求,即系统处于空闲状态,DAC不工作,当外部有转换请求时,则系统进入转换状态,每当计数使能信号到来时,Cnt1自加一,当Cnt1=25后,表明一次转换完成,将计数器清零,同时状态跳回空闲态,等待下一次使能信号的到来。具体的状态转移图如下所示:
图2 系统状态转移图
该状态机的代码对应如下:
| 以下是代码片段: always @(posedge Clk or negedge Rst_n) if(!Rst_n) Cnt_State <= IDEL; else begin case(Cnt_State) IDEL: if(Do_DA) Cnt_State <= DO_CNT; else Cnt_State <= IDEL; DO_CNT: if(Cnt1 == 5'd25) Cnt_State <= IDEL; else Cnt_State <= DO_CNT; default:; endcase end |
| 以下是代码片段: always@(posedge Clk or negedge Rst_n) if(!Rst_n) Data_r <= 10'd0; else if(Do_DA) Data_r <= Data; else Data_r <= Data_r; |
同时,为了产生1MHz的时钟,系统中使用了一个计数器Cnt2来专门产生该信号,该计数器对系统时钟进行计数,如当系统时钟为50M(周期为20ns)时,Cnt2计数到24,即计数了500ns,产生一个时钟周期的标志信号,则Cnt1在检测到这个标志信号后,便会自加1,因此,该标志信号出现两次则表明计时1000ns,对应时钟频率为1Mhz,即DAC芯片数字接口的时钟频率。该部分代码如下:
| 以下是代码片段: always @ (posedge Clk or negedge Rst_n) if(!Rst_n) Cnt2 <= 5'd0; else if(Cnt_State == DO_CNT) begin if(Cnt2 == Cnt2_Top) Cnt2 <= 5'd0; else Cnt2 <= Cnt2 + 1'b1; end else Cnt2 <= 5'd0; |
为了兼容不同的系统时钟,这里采用参数化定制,得出对应的计数最大值,具体代码如下:
| 以下是代码片段: Localparam system_clk = 50_000_000; /*系统时钟*/ Localparam Cnt2_Top = system_clk / 1_000_000 / 2 - 1; /*500ns技术器计数最大值*/ |
系统时钟设置为50M,则计数最大值为50000000/1000000/2– 1 = 24,当系统时钟改变后,只需要修改system_clk的值,即可保证Cnt2计数一次的时间为500ns。
最后,附上主序列中的操作代码:
| 以下是代码片段: always@(posedge Clk or negedge Rst_n) if(!Rst_n) begin DAC_Dout <= 1; DAC_Clk <= 0; DAC_LOAD <= 1; DAC_LDAC <= 1; DA_Done <= 1; end else begin case(Cnt1) 0: begin DAC_Dout <= 1; DAC_Clk <= 0; DAC_LOAD <= 1; DAC_LDAC <= 1; DA_Done <= 1; end 1:begin DAC_Dout <= Data_r[10]; DAC_Clk <= 1;DA_Done <= 0;end 2:DAC_Clk <= 0; 3:begin DAC_Dout <= Data_r[9]; DAC_Clk <= 1;end 4:DAC_Clk <= 0; 5:begin DAC_Dout <= Data_r[8]; DAC_Clk <= 1;end 6:DAC_Clk <= 0; 7:begin DAC_Dout <= Data_r[7]; DAC_Clk <= 1;end 8:DAC_Clk <= 0; 9:begin DAC_Dout <= Data_r[6]; DAC_Clk <= 1;end 10:DAC_Clk <= 0; 11:begin DAC_Dout <= Data_r[5]; DAC_Clk <= 1;end 12:DAC_Clk <= 0; 13:begin DAC_Dout <= Data_r[4]; DAC_Clk <= 1;end 14:DAC_Clk <= 0; 15:begin DAC_Dout <= Data_r[3]; DAC_Clk <= 1;end 16:DAC_Clk <= 0; 17:begin DAC_Dout <= Data_r[2]; DAC_Clk <= 1;end 18:DAC_Clk <= 0; 19:begin DAC_Dout <= Data_r[1]; DAC_Clk <= 1;end 20:DAC_Clk <= 0; 21:begin DAC_Dout <= Data_r[0]; DAC_Clk <= 1;end 22:DAC_Clk <= 0; 23:DAC_LOAD <= 0; 24:begin DAC_LOAD <= 1; DAC_LDAC <= 0; end 25:begin DAC_LDAC <= 1; DA_Done <= 1; end default:; endcase end |
该设计的仿真结果如下如所示:

由该仿真结果可知,时钟频率为1MHz,满足芯片工作要求,其它时序均与手册给出的时序保持一致。为了设计简洁,这里将LOAD和LDAC的低电平脉冲时间都设置为了500ns,而非最小时间250ns,这里主要是为了方便序列机的设计。当然,如此设计在一定程度上会影响DAC 的转换速率,不过在大多数应用场合已经足够,如需更加高效的设计,只需要对代码稍加修改即可。
本驱动的testbench编写较为简单,这里只附上对应代码,不做详细解释:
| 以下是代码片段: `timescale 1ns/1ns module TLC5620_Driver_tb; reg Clk; |
因为时间关系,这里只开发了该芯片的驱动,并用modelsim对该驱动进行了仿真,详细的调试和应用,小梅哥将在下一个实验中介绍。

用户1850535 2015-9-5 15:39
用户1767368 2015-1-4 16:43
用户1790382 2014-12-12 11:55
用户1007969 2014-12-12 11:25
用户1711475 2014-11-27 13:59
用户377235 2014-8-23 22:10
启芯 2014-8-11 12:23
用户377235 2014-8-9 11:10
有用
用户1773117 2014-8-9 08:42
用户377235 2014-8-4 23:46