
“(计算机)从2D到3D世界,是1995年之后最大的消费电子技术转折点,这将彻底改变人们的计算体验。”在今年初的美国CES展上,IntelCEO Brian Krzanich在其主题演讲中提出。这一转变的核心技术支持,得益于3D传感器,又称为深度摄像头的采用。
何为深度摄像头?
从人们的角度来看,这个世界永远在变化。当我们四处移动时,我们的目光也游走在整个环境中,丰富动态的场景信息不停地被传送到我们的大脑里。我们可以理解这些不断改变的信号,并以此生成对这个世界的根本性了解,从而和这个世界进行无缝交互。在过去三十年的计算机视觉领域中,有相当庞大的工作被投入到了这一块,尝试通过颜色和深度摄像头来模拟人类的感知能力。可以说,计算机视觉一直是人工智能领域里最活跃的部分,指纹识别、掌纹识别、人脸识别都属于其应用。可以说,深度摄像头就是计算机的眼睛。
那么究竟什么是深度摄像头?消费者最熟悉的当属微软开发的Kinect系列,Leap Motion的体感设备,三星智能电视的手势遥控功能等产品,这些均是深度摄像头的传统体感类应用。实现深度探测的主流技术目前有三类:
1:(单目)结构光技术路线
代表公司:PrimeSense / 代表产品:KinectI代
主要优势:识别距离远 / 主要问题:硬件难度和成本稍高
阵营公司:Apple(PrimeSense)、Microsoft、Intel、Google, etc.
主流评价:目前最主流的机器视觉工程化实现方法
2:双目可见光(可配合红外补光)
代表公司:LeapMotion / 代表产品:LeapMotion
主要优势:高精度 / 主要问题:检测范围太小(不足1米),远距离检测问题很多
阵营公司:LeapMotion
主流评价:应用场景太少
3:飞行时间法(ToF)
代表公司:Microsoft / 代表产品:KinectII代
主要优势:体感应用好 / 主要问题:传感器供应受限、体积和功耗大、像素低
阵营公司:Microsoft、SoftKinetic(刚被SONY收购)
主流评价:除微软在体感游戏之外民用应用不多
以结构光技术为例,其原理如图。
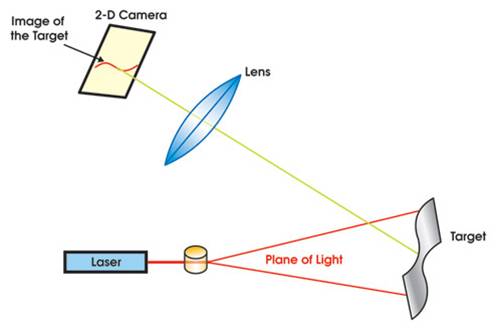
光源向检测空间内投射经过编码的激光光斑阵列,对空间进行标定并辅助计算三维空间位置。它是整合了衍射光学、图像处理、计算视觉算法和处理器计算平台的跨界组合工程,非标准的光学器件需要设计定制。其关键技术包括两个部分:投射光学系统、“结构光”pattern编码和衍射光学系统设计;以及图像处理和视觉计算算法。
该技术的代表公司有PrimeSense,它创立于 2005 年,于 2006 年研发出 3D 传感器,在当年的 E3 大展上与微软建立了联系,并催化出代号为 Project Natal 的神秘项目。等到 2009 年 E3 大展时,微软发布了内置PrimeSense 3D 传感器的Kinect,成功掀起了“体感游戏”大潮。PrimeSense的原理,是使用3D光学感测技术,使用红外线系统来绘制场景的网格。通过传感器读取网格中的点,并结合来自CMOS传感器的图像信息,绘制出包含了深度信息的3D地图。这种方法被称为“RGB-D”,它由传统的红色,绿色和蓝色的图像信息加上“深度”信息构成。其核心为Light Coding技术,是利用连续光(近红外线)对测量空间进行编码,经感应器读取编码的光线,交由芯片运算进行解码后,产生成一张具有深度的图像。Light Coding技术的关键是雷射光散斑,当雷射光照射到粗糙物体、或是穿透毛玻璃后,会形成随机的反射斑点,称之为散斑。散斑具有高度随机性,也会随着距离而变换图案,空间中任何两处的散斑都会是不同的图案,等于是将整个空间加上了标记,所以任何物体进入该空间、以及移动时,都可确切纪录物体的位置。
深度摄像头供应格局
随着深度摄像头技术的不断发展,更多机器视觉应用正在不断涌现,例如智能安防和行为分析,环境感知(SLAM)用于视觉导航,消费类 3D建模等,同时深度摄像头也是近年来最火爆的AR/VR设备的核心模块之一。高级行为分析功能必需基于三维深度信息实现,此前市场上只有基于PrimeSense方案的体感游戏摄像头可用,在2013年PrimeSense被Apple 收购,其供应即将中断,急需要合适的替代产品。例如有一款采用PrimeSense开发板设计的iPad外置深度摄像头产品,在Kickstarter上募集了约130万美金,同样因为Apple收购PrimeSense的原因,类似项目全部陷入困境。在AR/VR设备应用中,远距离深度摄像头用于环境感知和建模;近距离深度摄像头用于手势识别。预计将来 99% 的 AR 设备和 50% 以上的 VR 设备将配备深度摄像头,而这两类应用的崛起,也将大力推动深度摄像头市场的增长。
PrimeSense的产品有结构光深度摄像头,也有完善的SDK,更有其定制的DSP+硬件加速器芯片以及强大的专利池。在PrimeSense被Apple 收购之后,市场上类似方案供应几乎成为空白,随后谷歌、英特尔等企业都相继在这一领域进行了投入,收购动作频繁。谷歌Project Tango,利用深度摄像头进行机器人室内导航;英特尔在 CES2015上演示RealSense深度摄像头对无人机进行视觉导航……可以说,深度摄像头是所有需要视觉传感器的机器,包括机器人、无人机、工业设备的必需模块。据IHS预计,到2019年手势感应传感器全球市场规模将从今年的23亿达到95亿美金,年复合增长率达到42.6%。
下图是该产业领导厂商主要技术发展及深度摄像头平台情况。
上图显示了科技行业巨头在深度摄像头领域的布局,他们通过收购构筑了各自的技术护城河。其中,Primesense被苹果收购可以视为一个转折点,收购以后,其对外授权和供货将会在 2015 年终止,所以那些使用了PrimeSense技术的厂商们不得不寻找替代方案,再加上AR/VR设备的兴起,让国内一些初创企业盯住了这一市场。
费浙平曾经是处理器巨头ARM在中国大陆的第一位员工,在全球顶尖的CPU和GPU公司工作十多年,于2012年开始深度摄像头的技术研发,团队的主要技术合伙人来自于国内机器视觉领域的著名团队Click研发小组,在光学、硬件和算法上非常有经验和积累。立志成为机器视觉领域的世界级核心技术平台。
图漾目前已经完成了所有核心技术的研发和器件定制,产品已经开始在诸多领先客户中使用。区别于主流的单目结构光技术方案,他们创造性地采用了主动双目的技术路线,主动双目(Active Stereo)技术的不断演进和优化,能够把深度摄像头性能推向极致,同时彻底规避了与市场先行者的专利风险。
根据他的规划,图漾的第一个产品型态是深度摄像头(传感器),可利用视觉计算原理,计算出拍摄场景内物体的3维空间位置信息,在此基础上可以实现环境感知、体感、建模、行为识别等各种应用。在第二阶段,跟行业合作伙伴配合,为最终客户提供基于深度信息的视觉应用开发支持,比如3D建模和SLAM等,构建起深度技术应用的技术平台。图漾的硬件技术发展路线和方向有两个,一是提供适合移动设备用的小型化低功耗深度摄像头,二是远距离和超高分辨率的高性能产品。
在竞争格局上,费浙平表示,被Apple收购后的PrimeSense基本上会是自用,微软绑定了Win10,也在明显趋于封闭;英特尔的产品规格非常固定,且需绑定 x86 处理器,应用场景比较受限;谷歌志不在成为硬件供应商,甚至有朝一日很可能会彻底开源其Project Tango的源代码,帮助促进深度摄像头的大规模普及应用。以色列有一些创业群体,但是这类企业的目标在于被收购,难以成为可靠的合作伙伴。事实上,在过去的12个月里面,市面上大多数的深度技术公司都已经被大公司收入旗下了。“这一领域的特点是技术门槛极高,技术发展整体上尚属于早期,整个行业都在技术起飞过程当中。类似于高仿Kinect硬件的方式不是我们的兴趣,我们的目标是成为世界顶尖的深度技术公司,在这个技术点上做出创造性的领先技术和产品,支持计算视觉应用从行业扩展到我们每个人的工作和生活当中。”


用户1454308 2016-1-11 08:43
Good
damengvs13_149613289 2012-2-2 11:28
用户1275934 2012-1-30 10:18
用户1591265 2012-1-18 14:49
用户1525767 2012-1-18 08:47
用户1184577 2012-1-18 08:39
用户1279580 2012-1-18 07:45
用户1279580 2012-1-18 07:42
用户1602177 2012-1-17 10:20
用户1125492 2012-1-17 08:59