
黑金动力社区:http://www.heijin.org
这一节,我们来说说RS232,俗称串口。大家对这东西应该很了解,没什么可说的。相对前面我们讲的内容,这一节比较复杂,我会尽力把它讲清楚。在这一节中,我不仅要给大家讲解如何去实现RS232功能,更重要的是要提出一种编程思想,如何让程序编写的更严谨,更专业,更有利于以后的维护和移植。
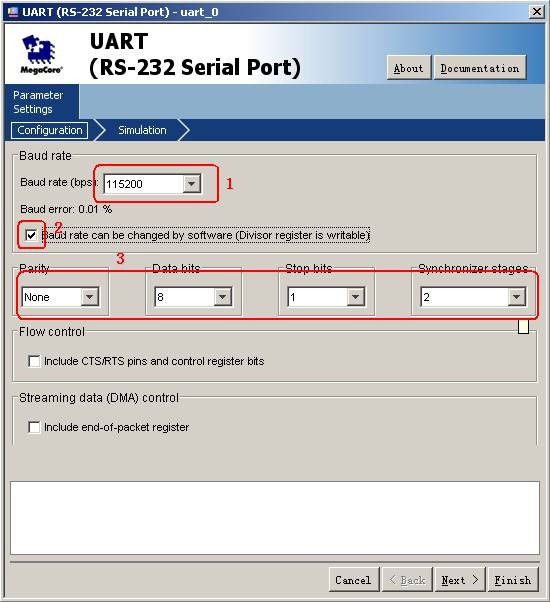
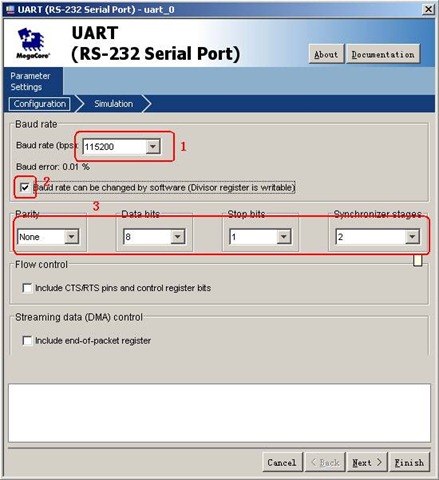
首先,我们要在NIOS II 软核中构建RS232模块。打开Quartus软件,双击进入SOPC BUILDER,然后点击下图所示红圈处,

点击后,如下图所示,红圈1处为波特率,我们设置为115200;红圈2处是是否允许通过软件改变波特率,我们选中,便是允许,这样我们就可以通过软件来随时更改波特率,如果软件不设置,默认值就是上面设置的115200;红框3中是设置一些与串口有关的参数,校验方式,数据位,停止位,后面那个基本不用,大家根据实际情况来修改。设置好以后,点击Next,Finish,完成构建。
构建好以后,将其更名为RS232,然后进行自动分配地址,自动分配中断号。一切就绪,点击General,进行编译。
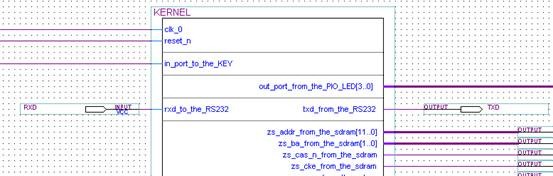
编译好以后,退出,进入Quartus界面,给其分配引脚,如下图所示
然后运行TCL脚本,编译,等待……
编译好以后,大家可以选择自己的方式将程序下载到FPGA中,AS或JTAG都可以。
打开NIOS II 9.0 IDE后,按快捷键Ctrl+b编译程序,等待编译……
编译好以后,我们再来看system.h文件。可以看到rs232部分的代码了,如下表所示,红圈处就是我们要用到的部分,大家已经熟悉了,一个是基地址,一个是中断号
/*
* RS232 configuration
*
*/
#define RS232_NAME "/dev/RS232"
#define RS232_TYPE "altera_avalon_uart"
#define RS232_BASE 0x00201000
#define RS232_SPAN 32
#define RS232_IRQ 2
#define RS232_BAUD 115200
#define RS232_DATA_BITS 8
#define RS232_FIXED_BAUD 0
#define RS232_PARITY 'N'
#define RS232_STOP_BITS 1
#define RS232_SYNC_REG_DEPTH 2
#define RS232_USE_CTS_RTS 0
#define RS232_USE_EOP_REGISTER 0
#define RS232_SIM_TRUE_BAUD 0
#define RS232_SIM_CHAR_STREAM ""
#define RS232_FREQ 100000000
#define ALT_MODULE_CLASS_RS232 altera_avalon_uart
下面,我们开始编写软件程序,首先是修改sopc.h。如下表格所示
typedef struct
{
//接收寄存器
union{
struct{
volatile unsigned long int RECEIVE_DATA :8;
volatile unsigned long int NC :24;
}BITS;
volatile unsigned long int WORD;
}RXDATA;
//发送寄存器
union{
struct{
volatile unsigned long int TRANSMIT_DATA :8;
volatile unsigned long int NC :24;
}BITS;
volatile unsigned long int WORD;
}TXDATA;
//状态寄存器
union{
struct{
volatile unsigned long int PE :1;
volatile unsigned long int FE :1;
volatile unsigned long int BRK :1;
volatile unsigned long int ROE :1;
volatile unsigned long int TOE :1;
volatile unsigned long int TMT :1;
volatile unsigned long int TRDY :1;
volatile unsigned long int RRDY :1;
volatile unsigned long int E :1;
volatile unsigned long int NC :1;
volatile unsigned long int DCTS :1;
volatile unsigned long int CTS :1;
volatile unsigned long int EOP :1;
volatile unsigned long int NC1 :19;
} BITS;
volatile unsigned long int WORD;
}STATUS;
//控制寄存器
union{
struct{
volatile unsigned long int IPE :1;
volatile unsigned long int IFE :1;
volatile unsigned long int IBRK :1;
volatile unsigned long int IROE :1;
volatile unsigned long int ITOE :1;
volatile unsigned long int ITMT :1;
volatile unsigned long int ITRDY :1;
volatile unsigned long int IRRDY :1;
volatile unsigned long int IE :1;
volatile unsigned long int TRBK :1;
volatile unsigned long int IDCTS :1;
volatile unsigned long int RTS :1;
volatile unsigned long int IEOP :1;
volatile unsigned long int NC :19;
}BITS;
volatile unsigned long int WORD;
}CONTROL;
//波特率分频器
union{
struct{
volatile unsigned long int BAUD_RATE_DIVISOR :16;
volatile unsigned long int NC :16;
}BITS;
volatile unsigned int WORD;
}DIVISOR;
}UART_STR;
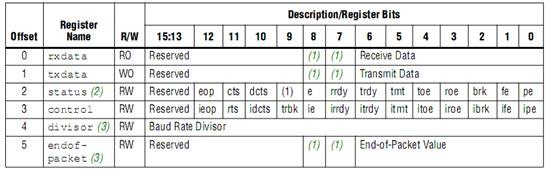
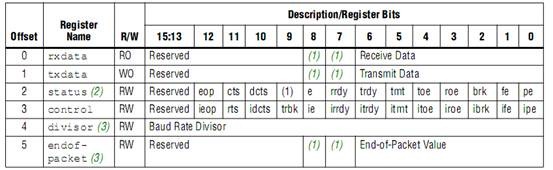
这个结构体中包括5个共用体,这5个共用体对应RS232的5个寄存器,我们来看看这5个寄存器,下图所示,这个图来自《n2cpu_Embedded Peripherals.pdf》的第6-11页
这个图中的(1)有一个说明,就是说第7,8位根据设置的数据位有所改变,我们设置数据位8位,所以7,8位与前6为性质相同。
与之前讲的PIO的结构体类似,这个结构体的内容是按上图的寄存器顺序来定义的,(因为endofpacket没用到,所以在结构中没有定义)这样在操作过程中就可以实现相应的偏移量(offset)。
在这个结构体中,我们嵌套了5个共有体,在共用体中,我们又使用了结构体和位域。头一次看的一定很头晕。其实,我们这样做的目的就是想对寄存器的每一位进行单独的控制,同时也可以实现这个寄存器的整体控制。具体应用,我们在下面的程序中会应用到。
有了上面来的结构体以后,我们需要定义一个宏,跟PIO的类似。
#define _UART
#ifdef _UART
#define UART ((UART_STR *) RS232_BASE)
#endif
不用解释了吧,在PIO部分已经解释过了,应该没什么问题了吧。
接下来,我们要在inc下建立uart.h文件,如下图所示

建好以后,对uart.h进行编写,如下表所示
/*
* ==================================================
* Filename: uart.h
* Description: The head of uart device driver
* Version:
* Created:
* Revision: none
* Compiler: Nios II IDE
*
* Author: AVIC
* Company:
* ===================================================
*/
#ifndef UART_H_
#define UART_H_
#include "../inc/sopc.h"
#define BUFFER_SIZE 200
/*-----------------------------------------------------
* Define
*----------------------------------------------------*/
typedef struct{
unsigned char mode_flag; //xmodem 1;uart 0;
unsigned int receive_flag;
unsigned int receive_count;
unsigned char receive_buffer[BUFFER_SIZE];
int (* send_byte)(unsigned char data);
void (* send_string)(unsigned int len, unsigned char *str);
int (* init)(void);
unsigned int (* baudrate)(unsigned int baudrate);
}UART_T;
extern UART_T uart;
#endif /*UART_H_*/
在上面的代码中,结构体UART_T很重要,它是模拟面向对象的一种编程思想,也是我之前说的一种很重要的编程方式。我们将与UART有关系的所有函数、变量都打包在一起,对其他函数来说,它们只能看到uart这个结构体,而里面的单独部分都是不可见的。希望大家可以好好体会其中的思想,对大家的编程一定会有很大的好处。
下面,我们要开始写RS232的驱动了,首先我们要在driver下面建立一个.c文件,命名为uart.c,如下图所示

建好以后,我们来编写uart.c文件,如下表所示
/*
* =================================================================
* Filename: uart.c
*
* Description: RS232 device driver
*
* Version:
* Created:
* Revision: none
* Compiler: Nios II IDE
*
* Author: AVIC
* Company: 金沙滩工作室
* ===============================================================
*/
/*--------------------------------------------------------------
* Include
*-------------------------------------------------------------*/
#include "sys/alt_irq.h"
#include "../inc/sopc.h"
#include <stdlib.h>
#include <stdio.h>
#include "../inc/uart.h"
/*--------------------------------------------------------------
* Function Prototype
*--------------------------------------------------------------*/
static int uart_send_byte(unsigned char data);
static void uart_send_string(unsigned int len, unsigned char *str);
static int uart_init(void);
static void uart_ISR(void);
static int set_baudrate(unsigned int baudrate);
//初始化uart结构体,大家注意结构体的初始化方式
UART_T uart={
.mode_flag=0,
.receive_flag=0,
.receive_count=0,
.send_byte=uart_send_byte,
.send_string=uart_send_string,
.init=uart_init,
.baudrate=set_baudrate
};
/*
* === FUNCTION ==================================================
* Name: uart_send_byte
* Description: 发送一个字节数据
* ================================================================
*/
static int uart_send_byte(unsigned char data)
{
//将接收到的数据放到接收数据寄存器内,等待状态寄存器trdy置1,当trdy置1,说明接收完毕
UART->TXDATA.BITS.TRANSMIT_DATA = data;
while(!UART->STATUS.BITS.TRDY);
return 0;
}
/*
* === FUNCTION =================================================
* Name: uart_send_string
* Description: 发送字符串数据
* ===============================================================
*/
static void uart_send_string(unsigned int len, unsigned char *str)
{
while(len--)
{
uart_send_byte(*str++);
}
}
/*
* === FUNCTION =================================================================
* Name: uart_init
* Description: 初始化程序
* ==============================================================
*/
static int uart_init(void)
{
//设置波特率为115200
set_baudrate(115200);
// 对控制寄存器的irrdy进行置1,表示当接收准备好后,中断使能
UART->CONTROL.BITS.IRRDY=1;
//清楚状态寄存器,这就是处理整个寄存器的方式,大家要注意
UART->STATUS.WORD=0;
//注册uart中断,ISR为uart_ISR
alt_irq_register(RS232_IRQ, NULL, uart_ISR);
return 0;
}
/*
* === FUNCTION ================================================
* Name: uart_ISR
* Description: 串口中断
* ==============================================================
*/
static void uart_ISR(void)
{
//等待状态寄存器的接收数据状态位rrdy,当rrdy位为1时,说明新接收的值传输到了接收数据寄存器
while(!(UART->STATUS.BITS.RRDY));
//reveive_buffer为我们通过栈的方式在内存中开设的内存块,将接受数据寄存器中的数据到这个内存块中
uart.receive_buffer[uart.receive_count++] = UART->RXDATA.BITS.RECEIVE_DATA;
//当接收数据的最后一位为\n(回车符)时,进入if语句,也就是说,\n作为了结束标志符,每次发送数据后,要加一个回车符作为结束符
if(uart.receive_buffer[uart.receive_count-1]=='\n'){
uart.receive_buffer[uart.receive_count]='\0';
uart_send_string(uart.receive_count,uart.receive_buffer);
uart.receive_count=0;
uart.receive_flag=1;
}
}
/*
* === FUNCTION ===============================================
* Name: set_baudrate
* Description: 设置波特率
* ==============================================================
*/
static int set_baudrate(unsigned int baudrate)
{
//设置波特率有一个公式的,波特率=时钟频率/(divisor+1),转换以后就是下面了。
UART->DIVISOR.WORD=(unsigned int)(ALT_CPU_FREQ/baudrate+0.5);
return 0;
}
编写好上面的函数以后,我们要修改main.c,如下表所示
#include "../inc/sopc.h"
#include "system.h"
#include "sys/alt_irq.h"
#include <unistd.h>
#include <stdio.h>
#include "../inc/uart.h"
int main()
{
unsigned char buffer[50]="Hello FPGA!\n";
//初始化串口,注意它的使用方法
uart.init();
//循环发送字符串
while(1){
uart.send_string(sizeof(buffer),buffer);
usleep(500000);
}
return 0;
}今天就讲到这,上面的讲解方式不知道大家觉得是否合适,如果有什么问题,请给我留言。



 /3
/3 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
文章评论(0条评论)
登录后参与讨论