
黑金动力社区:http://www.heijin.org
这一节,我将给大家讲解实时时钟部分的内容,我在黑金板上用的实时时钟芯片是DS1302,这块芯片很常见,性价比也很高。我们主要来讲如何在NIOS中实现其功能,所以DS1302功能介绍我简单概括一下,有问题的百度一下就都知道了。
DS1302是DALLAS公司推出的涓流充电实时时钟芯片,内含一个实时时钟/日历和31字节静态RAM,仅需要三根线:RES(复位),I/O(数据线),SCLK(串行时钟)。时钟/RAM 的读/写数据以一个字节或多达 31 个字节的字符组方式通信 DS1302 工作时功耗很低,保持数据和时钟信息时功率小于 1mW。下面看一下电路图吧,下图所示,很简单,三根线就可以搞定了。

首先,我们需要在软核中构建三个PIO模块,方法跟以前讲的一样。需要注意的是RTC_DATA这个PIO,在构建的过程中,我们将其选择为双向的IO口,因为它是数据线,既要输入也需要输出,如下图所示,红圈处就是我们需要注意的地方,其他两个IO口设置为仅输出。

看看构建好以后的样子吧,如下图是所示
接下来就是自动分配地址,中断,然后开始编译,等待……
回到Quartus后,分配引脚,还是需要注意数据线,也是双向的,分配引脚的时候,要构建双向引脚(bidir),如下图所示。

都设置好以后,我们运行TCL脚本文件,然后开始编译,又是等待……
编译好后,我们打开NIOS II IDE,首先,还是需要编译一下,CTRL+b,编译之后,我们看看system.h有什么变化。观察后可以看出,里面对了,RTC部分的代码,如下表所示,
#define RTC_DATA_NAME "/dev/RTC_DATA"
#define RTC_DATA_TYPE "altera_avalon_pio"
#define RTC_DATA_BASE 0x00201030
……
/*
* RTC_SCLK configuration
*
*/
#define RTC_SCLK_NAME "/dev/RTC_SCLK"
#define RTC_SCLK_TYPE "altera_avalon_pio"
#define RTC_SCLK_BASE 0x00201040
……
/*
* RTC_nRST configuration
*
*/
#define RTC_NRST_NAME "/dev/RTC_nRST"
#define RTC_NRST_TYPE "altera_avalon_pio"
#define RTC_NRST_BASE 0x00201050
……
/*
在这些代码中,我们需要用到的是以下部分
#define RTC_DATA_BASE 0x00201030
#define RTC_SCLK_BASE 0x00201040
#define RTC_NRST_BASE 0x00201050
好的,接下来,我们就开始写程序吧
第一步,修改sopc.h文件,加入以下代码到sopc.h中
#define _RTC
#ifdef _RTC
#define RTC_SCLK ((PIO_STR *) RTC_SCLK_BASE)
#define RTC_DATA ((PIO_STR *) RTC_DATA_BASE)
#define RTC_RST ((PIO_STR *) RTC_NRST_BASE)
#endif /* _RTC */
没什么可说的,接下来我们在inc文件夹下建立ds1302.h,在其中加入以下内容,跟串口程序一样,里面也有个结构体,用这种方式整合所有的函数和变量。
/*
* ===============================================================
*
* Filename: ds1302.h
* Description:
* Version: 1.0
* Created:
* Revision: none
* Compiler: Nios II 9.0 IDE
* Author: AVIC
* Company:
* ==============================================================
*/
#ifndef DS1302_H_
#define DS1302_H_
#include "../inc/sopc.h"
//对于双向的IO,操作的过程中要注意改变IO口的方向,置1为输出,置0为输入
#define RTC_DATA_OUT RTC_DATA->DIRECTION = 1
#define RTC_DATA_IN RTC_DATA->DIRECTION = 0
typedef struct{
void (* set_time)(unsigned char *ti);
void (* get_time)(char * ti);
}DS1302;
extern DS1302 ds1302;
#endif /*DS1302_H_*/
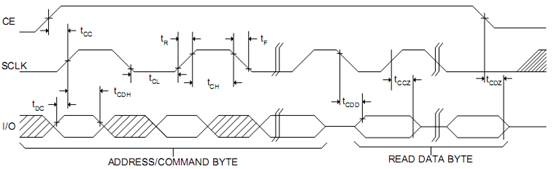
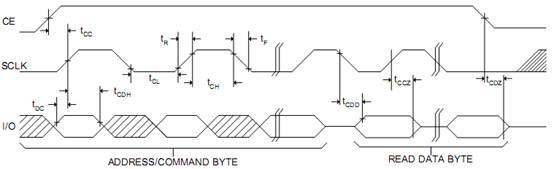
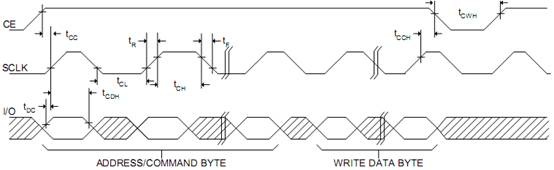
准备工作都做好以后,接下来我们要做的就是写ds1302的驱动了,根据DS1302的时序图来进行编写,首先我来给看看时序图吧,如下图所示,这个是读数据的时序图,
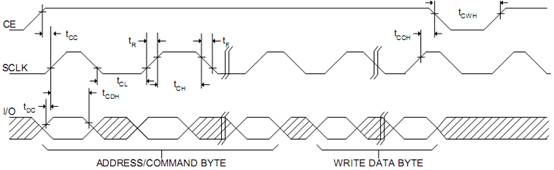
这个是写数据时序图
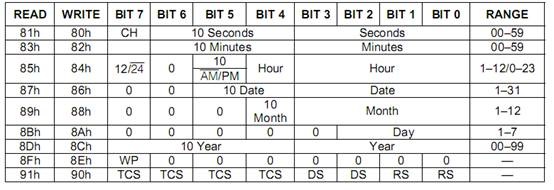
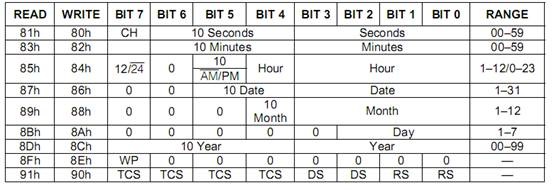
还有一个有关寄存器的表格,大家也要注意看一下,如下所示,前面两列是读和写的地址,每次操作时,都先写地址,再传数据。
现在,我们就根据时序图来编写ds1302的驱动,在driver文件夹下建ds1302.c文件,然后添加以下内容,
/*
* =============================================================
* Filename: ds1302.c
* Description:
* Version: 1.0
* Created: 2009-11-23
* Revision: none
* Compiler: Nios II 9.0 IDE
* Author: AVIC
* Company:
*
* =============================================================
*/
#include "../inc/ds1302.h"
//函数声明
static void delay(unsigned int dly);
static void write_1byte_to_ds1302(unsigned char da);
static unsigned char read_1byte_from_ds1302(void);
static void write_data_to_ds1302(unsigned char addr, unsigned char da);
static unsigned char read_data_from_ds1302(unsigned char addr);
void set_time(unsigned char *ti);
void get_time(char *ti);
//对DS1302结构体进行初始化,注意结构体中函数指针的初始化方式
DS1302 ds1302={
.set_time = set_time,
.get_time = get_time
};
/*
* === FUNCTION ====================================================
* Name: delay
* Description: 延时函数
* ==================================================================
*/
void delay(unsigned int dly)
{
for(;dly>0;dly--);
}
/*
* === FUNCTION =================================================
* Name: write_1byte_to_ds1302
* Description: 向ds1302写入1 byte数据
* ===============================================================
*/
void write_1byte_to_ds1302(unsigned char da)
{
unsigned int i;
//写数据的时候,RTC_DATA为输出,先设置其为输出
RTC_DATA_OUT;
//以下步骤是处理串行数据的的典型方法,一个位一个位的来判断
for(i=8; i>0; i--)
{
if((da&0x01)!= 0)
RTC_DATA->DATA = 1;
else
RTC_DATA->DATA = 0;
//根据芯片手册,适当加些延时,不是精确延时
delay(10);
RTC_SCLK->DATA = 1;
delay(20);
RTC_SCLK->DATA = 0;
delay(10);
da >>= 1;
}
}
/*
* === FUNCTION ==================================================
* Name: read_1byte_from_ds1302
* Description: 从ds1302读取1 byte数据
* ================================================================
*/
unsigned char read_1byte_from_ds1302(void)
{
unsigned char i;
unsigned char da = 0;
//当读数据的时候,我们要将数据IO设置为输入
RTC_DATA_IN;
//以下是典型的读串行数据的方法
for(i=8; i>0; i--)
{
delay(10);
da >>= 1;
if(RTC_DATA->DATA !=0 )
da += 0x80;
RTC_SCLK->DATA = 1;
delay(20);
RTC_SCLK->DATA = 0;
delay(10);
}
RTC_DATA_OUT;
return(da);
}
/*
* === FUNCTION =================================================
* Name: write_data_to_ds1302
* Description: 向ds1302写入数据
* ===============================================================
*/
void write_data_to_ds1302(unsigned char addr, unsigned char da)
{
RTC_DATA_OUT;
RTC_RST->DATA = 0;//复位,低电平有效
RTC_SCLK->DATA = 0;
delay(40);
RTC_RST->DATA = 1;
//先写地址,再写数据,每次写1字节
write_1byte_to_ds1302(addr); // 地址,命令
write_1byte_to_ds1302(da); // 写1Byte数据
RTC_SCLK->DATA = 1;
RTC_RST->DATA = 0;
delay(40);
}
/*
* === FUNCTION ===================================================
* Name: read_data_from_ds1302
* Description: 从ds1302读取数据
* =================================================================
*/
unsigned char read_data_from_ds1302(unsigned char addr)
{
unsigned char da;
RTC_RST->DATA = 0;
RTC_SCLK->DATA = 0;
delay(40);
RTC_RST->DATA = 1;
//先写地址,再读数据
write_1byte_to_ds1302(addr);
da = read_1byte_from_ds1302();
RTC_SCLK->DATA = 1;
RTC_RST->DATA = 0;
delay(40);
return(da);
}
/*
* === FUNCTION ==================================================
* Name: set_time
* Description: 设置时间
* ================================================================
*/
void set_time(unsigned char *ti)
{
unsigned char i;
unsigned char addr = 0x80;
write_data_to_ds1302(0x8e,0x00); // 控制命令,WP=0,写操作
for(i =7;i>0;i--)
{
write_data_to_ds1302(addr,*ti); // 秒 分 时 日 月 星期 年
ti++;
addr +=2;
}
write_data_to_ds1302(0x8e,0x80); // 控制命令,WP=1,写保护
}
/*
* === FUNCTION ==================================================
* Name: get_time
* Description: 获取时间 ,读取的时间为BCD码,需要转换成十进制
* ================================================================
*/
void get_time(char *ti)
{
unsigned char i;
unsigned char addr = 0x81;
char time;
for (i=0;i<7;i++){
time=read_data_from_ds1302(addr);//读取的时间为BCD码
ti = time/16*10+time%16;//格式为: 秒 分 时 日 月 星期 年
addr += 2;
}
}
OK,我们的驱动写好了,现在我们来写一个main函数来验证一下我们的驱动是否好用吧。
#include <unistd.h>
#include "../inc/uart.h"
#include "../inc/ds1302.h"
#include <stdio.h>
unsigned char time[7] = {0x00,0x19,0x14,0x17,0x03,0x17,0x10};//格式为: 秒 分 时 日 月 星期 年
int main()
{
unsigned char buffer[50]="\0";
//设置时间
ds1302.set_time(time);
while(1){
//获取时间
ds1302.get_time(time);
//将我们要的时间格式化一下,如2010-4-4 15:25:00
sprintf(buffer,"20%d-%d-%d %d:%d:%d\n",
time[6],time[4],time[3],time[2],time[1],time[0]);
//通过串口发送出去
uart.send_string(sizeof(buffer),buffer);
//延时1秒
usleep(1000000);
}
return 0;
}
在上面的程序中,我们获取时间后通过串口发送到上位机,这样也复习了我们上一节讲的串口程序。当然,大家也可以直接通过printf()打印出来。
在操作ds1302的时候有一点需要注意,ds1302的输入和输出都是8421BCD码进行的,所以我们需要对其进行转换。不过,输入的时候我是直接输入16进制,比如,我们设置分钟为10的话,我直接输入十六进制的0x10,这样就不需要转化了。而在输出的时候是必须要转化的,大家在写程序的时候注意这一点。
好了,我们来看看我们的劳动果实,看看串口传出的数据吧。
这一节就讲到这吧,如果有问题请给我留言,或者加入我们的NIOS技术群:113457511,让我们共同讨论解决,谢谢大家!



 /3
/3 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
文章评论(0条评论)
登录后参与讨论