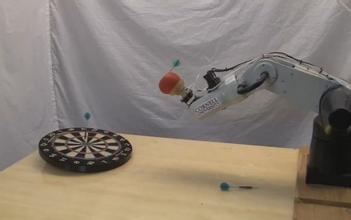
哆啦A梦曾经是风靡全球的日本动漫,相信80后的小伙伴都非常熟悉,不过看着哆啦A梦胖乎乎的圆手,相信很多小伙伴都曾经疑惑过,没有手指的圆手,是怎么抓东西的呢?其实如果看过漫画版本的人应该记得,漫画中曾明确交代,手部的功能就是对物体有吸附作用,也就是说,哆啦A梦圆圆的手其实是利用未来科技制造的任何东西都吸的住的防滑手。所以虽然圆圆的,却什么都可以拿的了。那时候设想的未来科技,什么时候能变成现实呢?其实,现在已经可以做到啦,有人制造出了哆啦A梦手:2011年 Cornell 大学、 Chicago 大学以及 iRobot 公司三方联合,成功造出了“哆啦A梦的手”: Universal robotic gripper based on the jamming of granular material。这款球形手无论从制作还是原理上说都不复杂。如其标题所说:based on the jamming of granular material。其夹持部分只需要一个气球, 在里面放上一些咖啡粉即可。放满了咖啡粉的气球与真空泵相连接。 其工作原理也十分简单,如下图所示:球形手以柔软的状态接近被夹持物体球形手在物体周围发生形变,包裹住物体真空泵抽气, 球形手中的咖啡粉由于负压紧实变硬,夹持住物体球形手完成夹持, 物体可被操纵下面是这款球形手工作时的视频:
这款球形手甚至还有一些弹射功能:
所以说,如果哆啦A梦的手真的以此为原理,那么它应该是柔软的,揉捏很容易变形。当哆啦A梦需要夹持物体时,手会变硬。不过这种球形手有几个明显不足:对于纸张等没有“高度”的物体难以夹持在外太空中失效这款球形手的制作和原理是如此的简单,以至于一个人在家中也可以轻松地自制这样一款球形手。比如下面这个教程:http://www.carlitoscontraptions.com/tag/jamming-gripper/




 /3
/3 







文章评论(0条评论)
登录后参与讨论