
1.安装VMware Workstation Pro
2.安装Ubuntu18.04
3.设置网络:NAT模式(联网)
4.安装Vmware tools(共享文件夹和随意缩小及可以复制粘贴)
(https://blog.csdn.net/qweKelliy/article/details/88784494?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522163886486816780265470874%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=163886486816780265470874&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~baidu_landing_v2~default-1-88784494.pc_v2_rank_blog_default&utm_term=18.04%E5%AE%89%E8%A3%85vmware+tools%E6%AD%A5%E9%AA%A4&spm=1018.2226.3001.4450)
5.安装ROS
1.设置安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
2.设置密钥
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
在更新之前,需要安装公钥,否则无法验证签名,命令如下:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
3.更新软件列表
sudo apt update
4.安装ROS
sudo apt-get install ros-melodic-desktop-full
5.安装完成之后初始化rosdep
sudo apt install python-rosdep
6.初始化rosdep
sudo rosdep init
rosdep update
大多数情况下,做到这一步都会报错,可能会出现如下情况:
···Website may be down 或者 ···ERROR: unable to process source
错误原因是由于 raw.githubusercontent.com 被墙,程序无法下载相应的文件导致的,正常情况下我们也无法访问该网站。
问题解决:
A. 下载rosdistro-master的压缩包,然后解压到主目录
cd ~
unzip rosdistro-master.zip
mv rosdistro-master rosdistro
链接:https://pan.baidu.com/s/1z25LvAV1Z7dCTuzELqhOsA
提取码:75r1
B. 修改 20-default.list 文件
sudo gedit /etc/ros/rosdep/sources.list.d/20-default.list
内容修改如下:
# os-specific listings first
yaml file:///home/xxx/rosdistro/rosdep/osx-homebrew.yaml osx
# generic
yaml file:///home/xxx/rosdistro/rosdep/base.yaml
yaml file:///home/xxx/rosdistro/rosdep/python.yaml
yaml file:///home/xxx/rosdistro/rosdep/ruby.yaml
gbpdistro file:///home/xxx/rosdistro/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
注意:上述 xxx 需替换为自己的用户名
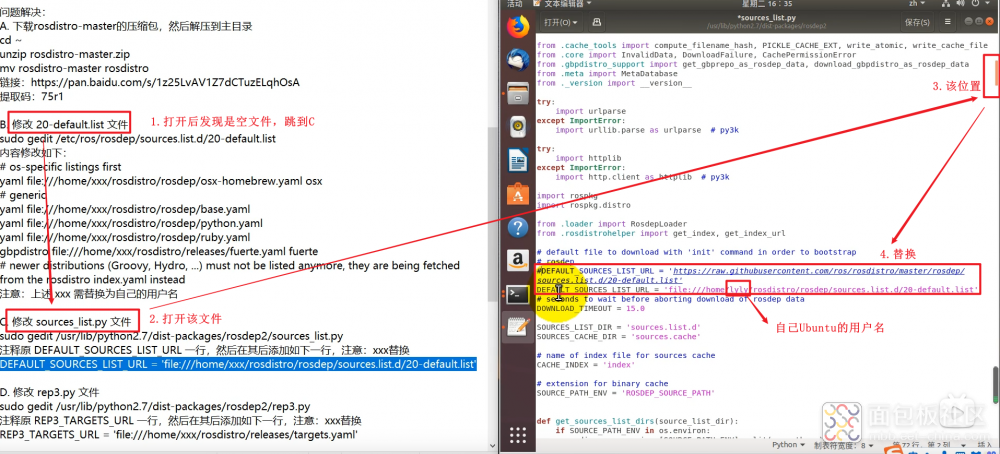
C. 修改 sources_list.py 文件
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
注释原 DEFAULT_SOURCES_LIST_URL 一行,然后在其后添加如下一行,注意:xxx替换
DEFAULT_SOURCES_LIST_URL = 'file:///home/xxx/rosdistro/rosdep/sources.list.d/20-default.list'
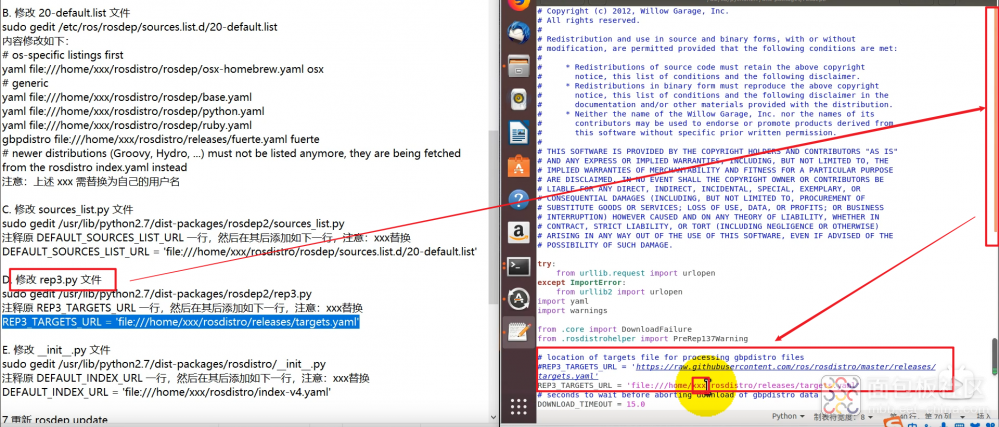
D. 修改 rep3.py 文件
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/rep3.py
注释原 REP3_TARGETS_URL 一行,然后在其后添加如下一行,注意:xxx替换
REP3_TARGETS_URL = 'file:///home/xxx/rosdistro/releases/targets.yaml'

E. 修改 __init__.py 文件
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
注释原 DEFAULT_INDEX_URL 一行,然后在其后添加如下一行,注意:xxx替换
DEFAULT_INDEX_URL = 'file:///home/xxx/rosdistro/index-v4.yaml'
7.重新 rosdep update
备注:rosdep update后,sudo rosdep init,再rosdep update,最后修改B
8.添加 ROS 环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
9.安装 rosinstall
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
10.第一次启动ROS时,需要进行环境变量配置,执行如下命令
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
11.先开启三个终端,然后分别依次输入如下命令:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
然后将鼠标聚焦到输入最后一个命令的窗口,通过键盘的上下左右键,分别控制小王八的前进,后退,左转,右转。
作者: msg, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3853633.html
版权声明:本文为博主原创,未经本人允许,禁止转载!




 /3
/3 






文章评论(0条评论)
登录后参与讨论