很长时间了一直在研究电机伺服,经历了无数的自我否定和被动否定,终于获得了一点点肯定,目前实验的低压直流伺服驱动器终于能够按照制定的参数运行了,自我感觉还相当不错!把其中的一些经验与朋友共享,同时也可以促进自己的进步,因此有了这个开源的打算。
但是仔细想了想,真要开源的话涉及很多的问题,有些可以明说,那要花费很多的功夫去整理资料;有些不好明说,涉及到开发环境的Z/D版;最难办的是“众口难调”这个永恒的真理了。咱这所谓的开源也不是很正规,远远没有上升到网络协作开发的高度,没有什么版本控制,主要就是公开一些博主的开发经验教训,希望能够帮初学者一些忙,同时吸引些高手来交流。
想来想去真有点不好办,先开个博,把这个事情开个头吧,实在是太懒了,也有朋友催催我,但是别催得太急了,会适得其反的哈。
大致的想法是:找机会做一版“五脏俱全”的袖珍驱动器,在它上面搭建开发实验环境,写一些文档资料引导初学者上路,为大家进军伺服驱动砍掉一些门槛。伺服电机我会在淘宝上找一款或者数款物美价廉的直流伺服,首先推出dsPIC33控制的低压直流伺服驱动器,将来还会扩展到STM32控制、无刷电机和交流伺服等,不过估计我不会玩高压大功率的,那玩意爆炸起来我有点怵。
下面放几张照片,是我目前使用的开发板,也是下一步开源板的原型:
 控制器:dsPIC33FJ64MC706(内带电机驱动模块,还有很多其他高性能外设,开发环境免费,中文资料丰富!)
控制器:dsPIC33FJ64MC706(内带电机驱动模块,还有很多其他高性能外设,开发环境免费,中文资料丰富!)
MOS驱动:HUP4081(优点在于内带电荷泵,可以使用满占空比,而且频率很高!但最高支持80V)
MOS:IR540N(经典、便宜!)
电流传感:单电源供电的霍尔传感器
此外还有一些其他的光隔输入和继电器输出
伺服电机:巨风/60V/400W/1.27Nm/8.4A/2000线 试验了好久~炸了N多次,前后烧毁四块板,更换过三四十次的驱动片和MOS,甚至可以看到MOS管部分都烧黑了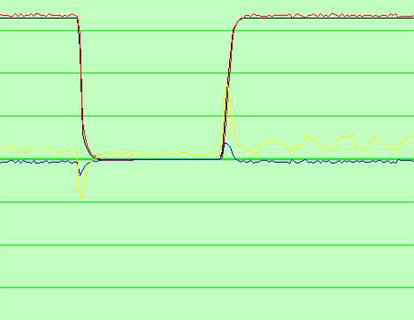
这个是我用VB编的简易数据示波器,单片机上报的驱动动态波形,图中所示为
速度环实验数据曲线:
黑色为速度给定(给定800RPM,并通过S曲线过渡处理,可以降低阶跃给定的不连续性危害)
红色为实际速度(跟踪相当的准确及时,稳定后有5%左右的瞬态波动,主要来源于电刷摩擦)
蓝色为速度误差
黄色为实际电流(最大电流6A)
变速过程迅速无超调;速度平稳后的电流有一些波动,那是我用小钳子一紧一松的夹住电机轴造成的,给他一个变化的负载力矩,此时的电机转速基本不变,说明稳速效果蛮不错的。
在速度环基础上的位置环,定位刚度挺高,用手几乎拧不动,最多也就1度吧,而且在较高的刚度下不会发生震荡。
>>>>>>原创不易,喜欢你就踩! 



 /3
/3 


飞言走笔 2011-10-11 08:42
用户1402357 2009-3-5 21:06
用户1212045 2009-2-20 19:48