
一、单片机交叉编译概念
(一)什么是交叉编译
在常规的软件开发中,我们通常在本机环境下进行编译,生成的可执行文件直接在本机运行,这被称为本地编译。而交叉编译则截然不同,它是在一个平台上生成另一个平台可执行代码的过程。
比如,我们在一台运行Windows系统的PC机上,使用特定的工具链,生成能在某款单片机(如STM32系列)上运行的二进制代码,这就是典型的交叉编译场景。
(二)为什么需要交叉编译
单片机资源有限,其运算能力、存储容量等远不及通用计算机。如果在单片机上直接进行编译,不仅效率低下,甚至可能因资源不足而无法完成。
借助交叉编译,我们可以利用PC机强大的计算能力和丰富的资源,快速完成编译过程,然后将生成的代码下载到单片机中运行,大大提高了开发效率。
另外,不同类型的单片机架构各异,如ARM架构、AVR架构等,每种架构都有其独特的指令集。交叉编译工具链能够针对不同的目标架构,生成与之匹配的机器代码,使开发者能够轻松适配各种单片机平台,拓宽了开发的选择范围。
二、交叉编译工具链剖析
(一)工具链组成
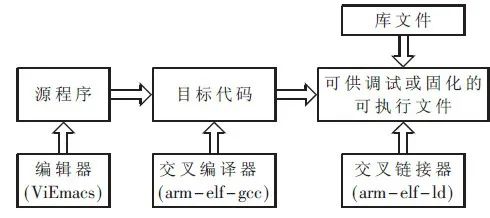
交叉编译工具链是实现交叉编译的核心,它通常包含多个组件。首先是编译器,如GCC(GNU Compiler Collection),这是一款功能强大且开源的编译器,支持多种编程语言和目标架构。以编译C语言代码为例,GCC可以将C语言代码翻译成目标单片机的机器语言。
其次是链接器,它的作用是将编译器生成的多个目标文件(.o文件)以及所需的库文件链接成一个完整的可执行文件。在链接过程中,链接器会解析各个目标文件之间的符号引用,确保程序在运行时能够正确访问所需的函数和变量。
还有汇编器,它将汇编语言代码转换为机器语言。虽然现在很多开发者直接使用高级语言(如C、C++)进行开发,但在一些对性能要求极高或需要直接操作硬件的场景下,汇编语言仍然发挥着重要作用。
(二)常见工具链介绍
1. GNU工具链:前面提到的GCC就是GNU工具链的核心组件。GNU工具链完全开源,拥有庞大的社区支持,几乎支持所有主流的单片机架构。无论是初学者还是经验丰富的开发者,都能轻松获取相关的文档和技术支持,快速上手使用。
2. IAR Embedded Workbench:这是一款商业性质的集成开发环境(IDE),内置了高效的交叉编译工具链。IAR在代码优化方面表现出色,生成的代码体积小、执行效率高,尤其适用于对代码空间和运行速度要求苛刻的单片机应用场景,如物联网设备、智能穿戴设备等。

3. Keil MDK:同样是一款知名的商业IDE,广泛应用于ARM架构单片机的开发。Keil MDK提供了丰富的调试功能和易用的界面,其交叉编译工具链与ARM架构的兼容性极佳,能够充分发挥ARM内核的性能优势,深受广大ARM单片机开发者的喜爱。
三、交叉编译环境配置
(一)Windows系统下配置
1. 安装工具链:以安装GNU工具链为例,首先从GNU官网下载适用于Windows系统的工具链安装包。下载完成后,运行安装程序,按照提示逐步完成安装。在安装过程中,注意选择正确的安装路径,建议选择默认路径,以避免后续可能出现的路径配置问题。
2. 配置环境变量:安装完成后,需要将工具链的安装路径添加到系统环境变量中。打开“系统属性”,在“高级”选项卡中点击“环境变量”。在“系统变量”中找到“Path”变量,点击“编辑”,然后将工具链的“bin”目录路径添加到“Path”变量值的末尾。
例如,如果工具链安装在“C:\Program Files (x86)\GNU Tools ARM Embedded\9 2020-q2-update\bin”,则将该路径添加到“Path”变量中。这样,系统在执行编译命令时就能找到相应的工具。
3. 测试安装:打开命令提示符(CMD),输入“arm-none-eabi-gcc -v”(假设安装的是针对ARM架构的GNU工具链),如果显示GCC的版本信息,则说明工具链安装和环境变量配置成功。
(二)Linux系统下配置
1. 软件包安装:在基于Debian或Ubuntu的Linux系统中,可以使用命令“sudo apt-get install gcc-arm-none-eabi”直接从软件源安装GNU工具链。
2. 环境变量设置:在Linux系统中,通常需要在用户主目录下的“.bashrc”文件中添加工具链的路径。使用文本编辑器打开“.bashrc”文件,在文件末尾添加“export PATH=$PATH:/path/to/toolchain/bin”,其中“/path/to/toolchain/bin”为工具链的“bin”目录实际路径。保存文件后,执行“source ~/.bashrc”命令使设置生效。
3. 验证安装:在终端中输入“arm-none-eabi-gcc -v”,若能正确显示GCC版本信息,表明安装和配置无误。
四、交叉编译示例
(一)简单C语言程序编译
1. 编写代码:使用文本编辑器编写一个简单的C语言程序,例如:
#include
int main(void) {
printf("Hello, world!\n");
return 0;
}
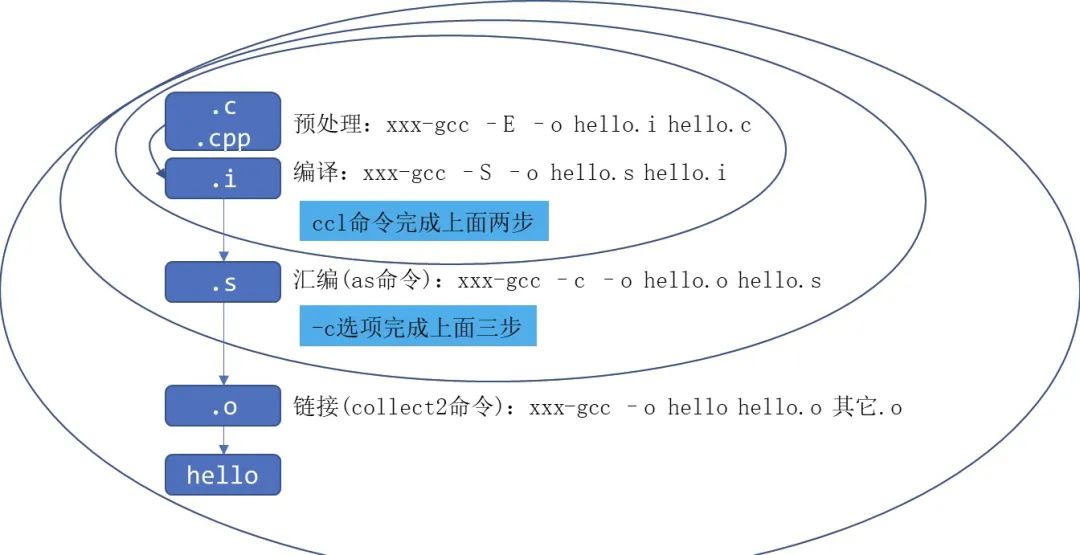
2. 编译命令:在命令行中进入程序所在目录,使用交叉编译命令进行编译。假设使用的是GNU工具链,针对ARM架构的单片机,编译命令为“arm-none-eabi-gcc -o main.elf main.c”,其中“arm-none-eabi-gcc”是交叉编译器,“-o”指定输出文件名为“main.elf”,“main.c”是源文件名。
3. 生成文件:编译成功后,会在当前目录下生成一个名为“main.elf”的可执行文件。这个文件包含了针对目标单片机架构的机器代码,但还不能直接下载到单片机中运行,需要进一步处理。
(二)链接与烧录
1. 链接脚本:为了将生成的目标文件正确链接成可执行文件,通常需要编写链接脚本。链接脚本描述了程序在内存中的布局,包括代码段、数据段、堆栈段等的位置和大小。例如,对于一个简单的ARM单片机应用,可以编写如下链接脚本:
SECTIONS {
.text : {
*(.text)
}
.data : {
*(.data)
}
.bss : {
*(.bss)
}
}
然后在编译时使用“-T linker_script.ld”选项指定链接脚本,如“arm-none-eabi-gcc -o main.elf -T linker_script.ld main.o”。
2. 烧录文件生成:使用工具将生成的“.elf”文件转换为适合烧录到单片机的格式,如“.hex”或“.bin”文件。对于GNU工具链,可以使用“arm-none-eabi-objcopy -O ihex main.elf main.hex”命令将“.elf”文件转换为“.hex”文件。
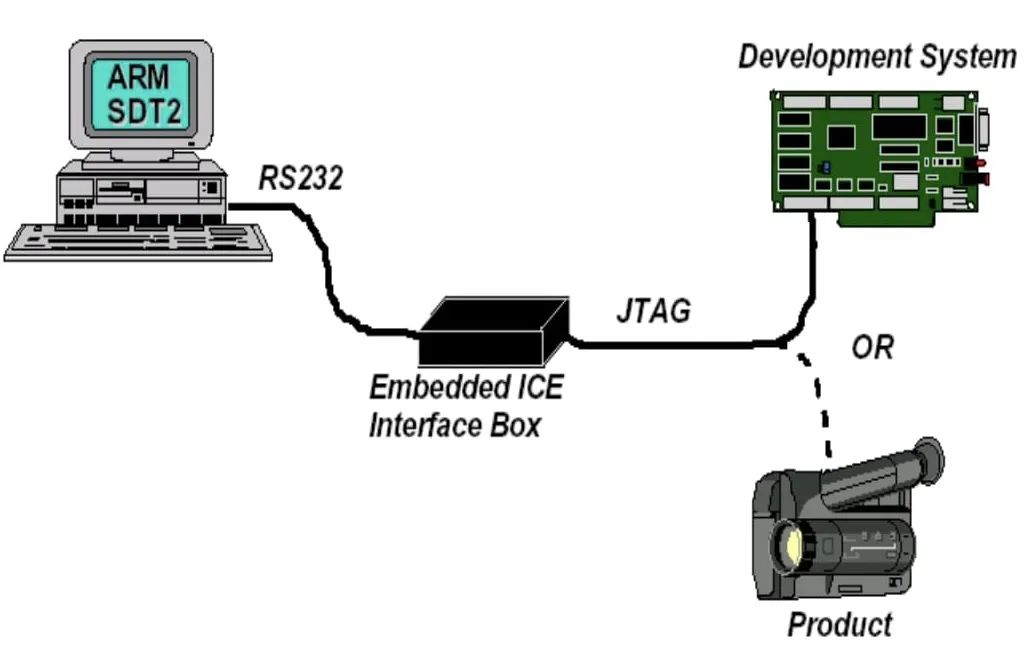
3. 烧录到单片机:最后,使用相应的烧录工具(如J-Link、ST-Link等)将生成的烧录文件下载到单片机中。不同的单片机和烧录工具操作方法略有不同,但一般都需要在烧录工具中设置好目标单片机型号、通信接口等参数,然后选择烧录文件进行下载。
(一)编译错误排查
1. 语法错误:这是最常见的编译错误,通常是由于代码中存在拼写错误、缺少分号、括号不匹配等问题导致。编译器会在错误信息中指出错误所在的文件名和行号,开发者只需根据提示仔细检查代码即可。
2. 库文件缺失:如果程序中使用了外部库文件,而编译时找不到相应的库,就会出现链接错误。此时,需要检查库文件的路径是否正确,是否已将库文件添加到编译选项中。
3. 架构不匹配:当交叉编译工具链与目标单片机架构不匹配时,会出现各种奇怪的编译错误。确保选择的工具链与目标单片机架构完全一致,包括CPU内核、指令集等参数。
(二)调试技巧
1. 使用调试信息:在编译时添加“-g”选项,编译器会在生成的可执行文件中包含调试信息。这样在调试过程中,调试工具(如GDB)就能显示源代码和变量值,方便开发者定位问题。
2. 断点调试:利用调试工具设置断点,程序运行到断点处会暂停执行,开发者可以查看当前程序的运行状态,包括寄存器值、内存数据等,逐步排查问题。
3. 日志输出:在程序中适当添加日志输出语句,如使用“printf”函数输出关键变量值和程序执行流程信息。通过查看日志,能够快速了解程序的运行情况,定位潜在问题。
 0
0











