
在刚开始接触STM32的时候,使用的keil作为IDE,由于在这之前,使用过VS, 使用过eclipse,因而在使用keil之后,实在难以忍受keil编辑器简陋的功能,可以说是极其糟糕的写代码体验。
之后,尝试过各种IDE,使用eclipse+keil,结果发现eclipse对C语言的支持也是鸡肋,使用emBits+gcc,需要和其他人协同的话就比较麻烦,之后发现了platformIO,也是使用gcc作为编译器,不过只支持HAL库,而且还有一个重要的原因,同事都是用的keil,如果我使用gcc,就不能协同工作了。
最后,通过使用VS Code + keil的方式,完美解决了写代码的体验问题,以及工程协作问题,其实网上使用VS Code作为编辑器,keil作为编译器的教程很多,不过基本都是需要在VS Code中编辑,然后在keil中编译,下载,调试,本文就要实现编辑,编译,下载,调试,全部使用VS Code。
Part1环境
(1)VS Code;
(2)keil;python;
(3)GNU Arm Embedded Toolchain(arm gcc工具链);
(4)C/C++(VS Code 插件);
(5)Cortex-Debug(VS Code 插件);
(6)其他VS Code插件(提升体验)。
Part2前提
正式写代码之前,首先需要建立好一个工程,这个需要使用keil完成,包括工程配置,文件添加…
Part3编辑
在安装好VS Code插件之后,VS Code编写C代码本身体验就已经很好了,
但是,因为我们使用的是keil环境,所以需要配置头文件包含,宏定义等,在工程路径的.vscode文件夹下打开c_cpp_properties.json文件,没有自己新建一个,内容配置如下:
{
"configurations": [
{
"name": "STM32",
"includePath": [
"D:/Program Files/MDK5/ARM/ARMCC/**",
"${workspaceFolder}/**",
""
],
"browse": {
"limitSymbolsToIncludedHeaders": true,
"databaseFilename": "${workspaceRoot}/.vscode/.browse.c_cpp.db",
"path": [
"D:/Program Files/MDK5/ARM/ARMCC/**",
"${workspaceFolder}/**",
""
]
},
"defines": [
"_DEBUG",
"UNICODE",
"_UNICODE",
"__CC_ARM",
"USE_STDPERIPH_DRIVER",
"STM32F10X_MD"
],
"intelliSenseMode": "msvc-x64"
}
],
"version": 4
}
其中,需要在includePath和path中添加头文件路径,${workspaceFolder}/**是工程路径,不用改动,额外需要添加的是keil的头文件路径,
然后在defines中添加宏,也就是在keil的Options for Target的C++选项卡中配置的宏,然后就可以体验VS Code强大的代码提示,函数跳转等功能了(甩keil的编辑器一整个时代)。
Part4编译、烧录
编译和烧录通过VS Code的Task功能实现,通过Task,使用命令行的方式调用keil进行编译和烧录。
keil本身就支持命令行调用,具体可以参考keil的手册,这里就不多说了,但是问题在于,使用命令行调用keil,不管是什么操作,他的输出都不会输出到控制台上!!!(要你这命令行支持有何用)
不过好在,keil支持输出到文件中,那我们就只能利用这个做点骚操作了。一边执行命令,一边读取文件内容并打印到控制台,从而就实现了输出在控制台上,我们就能直接在VS Code中看到编译过程了
为此,我编写了一个Python脚本,实现keil的命令行调用并同时读取文件输出到控制台。
#!/usr/bin/python
# -*- coding:UTF-8 -*-
import os
import threading
import sys
runing = True
def readfile(logfile):
with open(logfile, 'w') as f:
pass
with open(logfile, 'r') as f:
while runing:
line = f.readline(1000)
if line != '':
line = line.replace('\\', '/')
print(line, end = '')
if __name__ == '__main__':
modulePath = os.path.abspath(os.curdir)
logfile = modulePath + '/build.log'
cmd = '\"D:/Program Files/MDK5/UV4/UV4.exe\" '
for i in range(1, len(sys.argv)):
cmd += sys.argv[i] + ' '
cmd += '-j0 -o ' + logfile
thread = threading.Thread(target=readfile, args=(logfile,))
thread.start()
code = os.system(cmd)
runing = False
thread.join()
sys.exit(code)
此脚本需要结合VS Code的Task运行,通过配置Task,我们还需要匹配输出中的错误信息(编译错误),实现在keil中,点击错误直接跳转到错误代码处,具体如何配置请参考VS Code的文档,这里给出我的Task。
{
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"tasks": [
{
"label": "build",
"type": "shell",
"command": "py",
"args": [
"-3",
"${workspaceFolder}/scripts/build.py",
"-b",
"${config:uvprojxPath}"
],
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": [
{
"owner": "c",
"fileLocation": [
"relative",
"${workspaceFolder}/Project"
],
"pattern": {
"regexp": "^(.*)\\((\\d+)\\):\\s+(warning|error):\\s+(.*):\\s+(.*)$",
"file": 1,
"line": 2,
"severity": 3,
"code": 4,
"message": 5
}
}
]
},
{
"label": "rebuild",
"type": "shell",
"command": "py",
"args": [
"-3",
"${workspaceFolder}/scripts/build.py",
"-r",
"${config:uvprojxPath}"
],
"group": "build",
"problemMatcher": [
{
"owner": "c",
"fileLocation": [
"relative",
"${workspaceFolder}/Project"
],
"pattern": {
"regexp": "^(.*)\\((\\d+)\\):\\s+(warning|error):\\s+(.*):\\s+(.*)$",
"file": 1,
"line": 2,
"severity": 3,
"code": 4,
"message": 5
}
}
]
},
{
"label": "download",
"type": "shell",
"command": "py",
"args": [
"-3",
"E:\\Work\\Store\\MyWork\\STM32F1\\FreeModbus_M3\\scripts\\build.py",
"-f",
"${config:uvprojxPath}"
],
"group": "test"
},
{
"label": "open in keil",
"type": "process",
"command": "${config:uvPath}",
"args": [
"${config:uvprojxPath}"
],
"group": "test"
}
]
}
对于使用ARM Compiler 6编译的工程,build和rebuild中的problemMatcher应该配置为:
"problemMatcher": [
{
"owner": "c",
"fileLocation": ["relative", "${workspaceFolder}/MDK-ARM"],
"pattern": {
"regexp": "^(.*)\\((\\d+)\\):\\s+(warning|error):\\s+(.*)$",
"file": 1,
"line": 2,
"severity": 3,
"message": 4,
}
}
]
文件中的config:uvPath和config:uvprojxPath分别为keil的UV4.exe文件路径和工程路径(.uvprojx),可以直接修改为具体路径,或者在VS Code的setting.json中增加对应的项,至此,我们已经完美实现了在VS Code中编辑,编译,下载了。
编译输出:

有错误时输出:
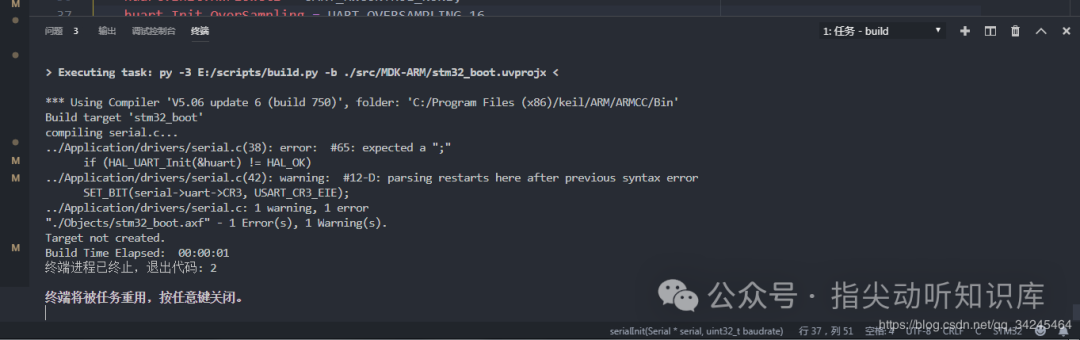
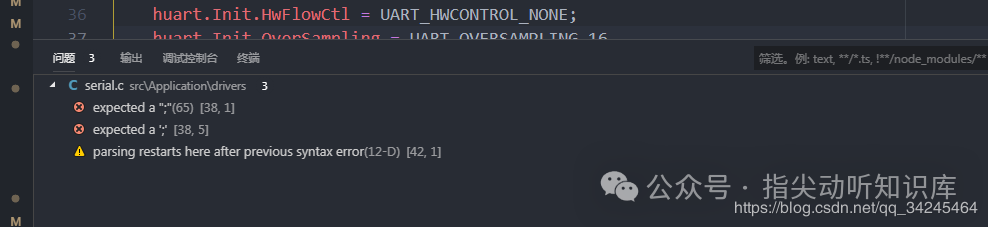
错误匹配:
Part5调试
调试需要使用到Cortex-Debug插件,以及arm gcc工具链,这部分可以参考Cortex-Debug的文档,说的比较详细;
首先安装Cortex-Debug插件和arm gcc工具链,然后配置好环境路径,如果使用Jlink调试,需要下载Jlink套件,安转好之后,找到JLinkGDBServerCL.exe这个程序,在VS Code的设置中添加"cortex-debug.JLinkGDBServerPath": "C:/Program Files (x86)/SEGGER/JLink/JLinkGDBServerCL.exe",后面的路径是你自己的路径。
这里补充一下arm gcc工具链的配置:"cortex-debug.armToolchainPath": "D:\\Program Files (x86)\\GNU Arm Embedded Toolchain\\9 2020-q2-update\\bin",后面的路径是你自己的路径。如果使用STLink调试,需要下载stutil工具,在GitHub上搜索即可找到,同样配置好路径即可。
以上步骤弄好之后,可以直接点击VS Code的调试按钮,此时会新建luanch.json文件,这个文件就是VS Code的调试配置文件,可参考我的文件进行配置。
{
// 使用 IntelliSense 了解相关属性。
// 悬停以查看现有属性的描述。
// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "Cortex Debug(JLINK)",
"cwd": "${workspaceRoot}",
"executable": "${workspaceRoot}/Project/Objects/Demo.axf",
"request": "attach",
"type": "cortex-debug",
"servertype": "jlink",
"device": "STM32F103C8",
"svdFile": "D:\\Program Files\\ARM\\Packs\\Keil\\STM32F1xx_DFP\\2.3.0\\SVD\\STM32F103xx.svd",
"interface": "swd",
"ipAddress": null,
"serialNumber": null
},
{
"name": "Cortex Debug(ST-LINK)",
"cwd": "${workspaceRoot}",
"executable": "${workspaceRoot}/Project/Objects/Demo.axf",
"request": "attach",
"type": "cortex-debug",
"servertype": "stutil",
"svdFile": "D:\\Program Files\\ARM\\Packs\\Keil\\STM32F1xx_DFP\\2.3.0\\SVD\\STM32F103xx.svd",
"device": "STM32F103C8",
"v1": false
}
]
}
注意其中几个需要修改的地方,executable修改为你的工程生成的目标文件,也就是工程的.axf文件,svdFile用于对MCU外设的监控,该文件可以在keil的安装路径中找到,可以参考我的路径去找,配置完成后,再次点击调试按钮即可进行调试。
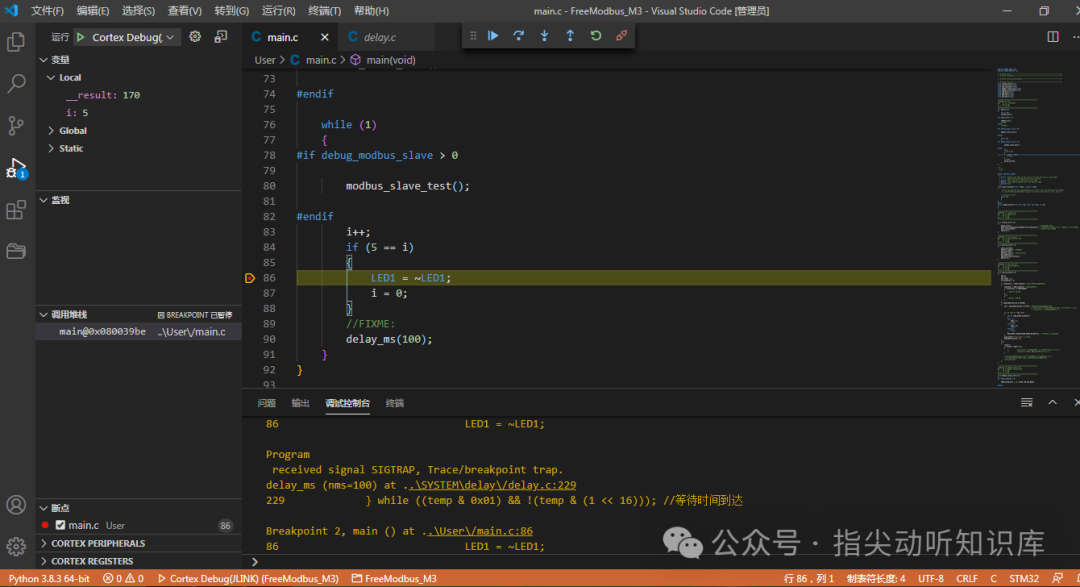
相比keil自己的调试功能,VS Code还支持条件断点,可以设置命中条件,次数等,可以极大的方便调试。
总结
通过以上的配置,我们基本上,除了建立工程和往工程中添加文件,其他完全不需要打开keil,所以也无妨说一句,再见,智障keil!
 0
0







