图腾柱PFC电路
随着电动汽车行业的快速发展,市场需求与行业间的竞争强度不断增加。目前全世界已经有许多公司和科研机构致力于车载充电机 PFC 的研发,国外的公司和团队包括Meta、Valeo、Kostal、Emerson、Brusa、Tesla等,国内的公司和团队包括华为、汇川、台达、联电、欣锐、威迈斯、富特、北汽新能源等。
国家工业和信息化部门发布的《电动汽车用传导式车载充电机技术条件》,明确提出了对车载充电机充电效率和功率因数的要求:在规定环境条件,额定输入电压和连续工作模式下,车载充电机的输出功率等于满载功率 50%情况下,充电效率应能达到 90%以上,功率因数不应小于 0.96;在输出功率等于满载功率100%情况下,功率因数不应小于 0.99。
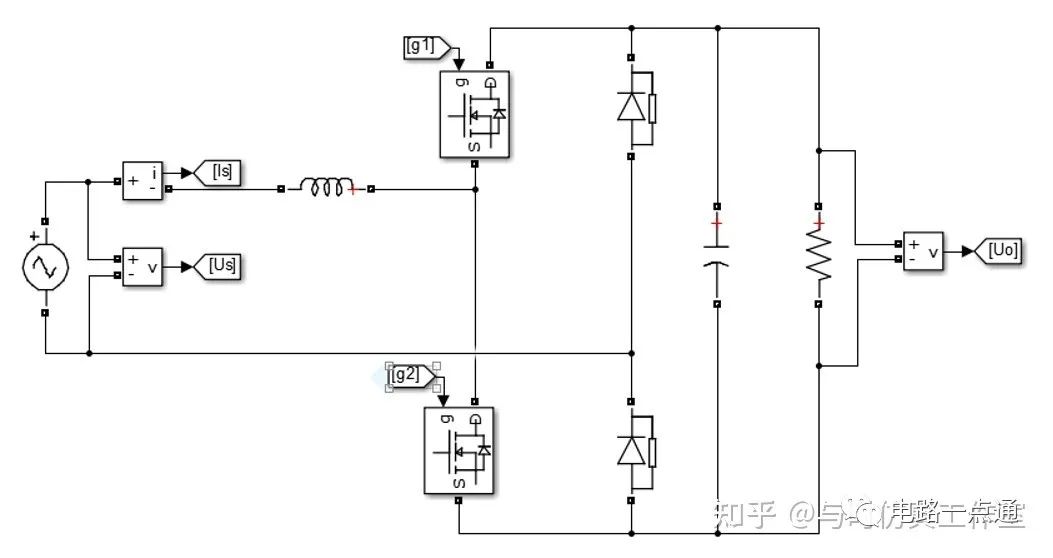
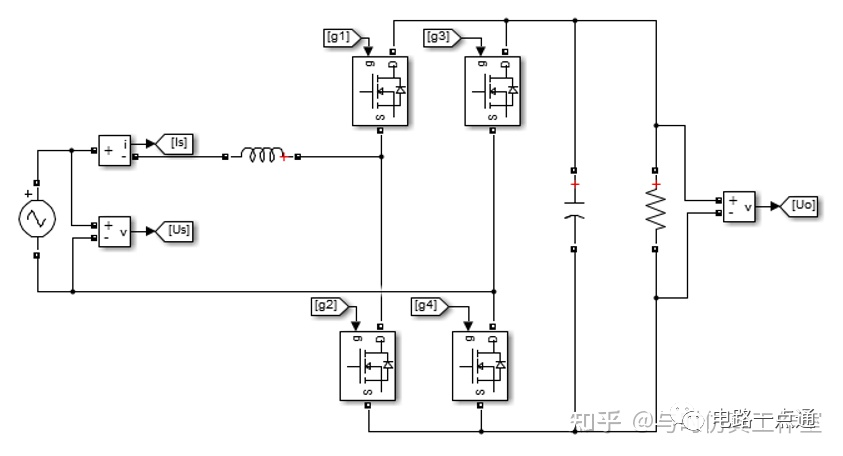
图腾柱无桥 PFC 具有共模干扰噪声低,使用元器件数量少,效率高等优势,被大量应用于车载充电机的前级PFC。这段时间就针对图腾柱(MOSFET+二极管)、图腾柱(快管+慢管)进行了matlab/simulink仿真,在验证主电路的同时,验证了多种控制算法。两种电路的原理图如下:
仿真模型参数
设计了一个6.6kW图腾柱PFC主电路,输入电压AC220V 50Hz,输出电压DC400V,输出电压纹波峰峰值1.5%,MOSFET开关频率100kHz,负载6.6kW,输入功率因数>0.99,输入电流THD<3%,输入电流纹波系数0.05。

软件锁相环PLL
锁相环采用的是基于二阶广义积分器的SOGI-PLL,其锁相原理图如下,这里不赘述。
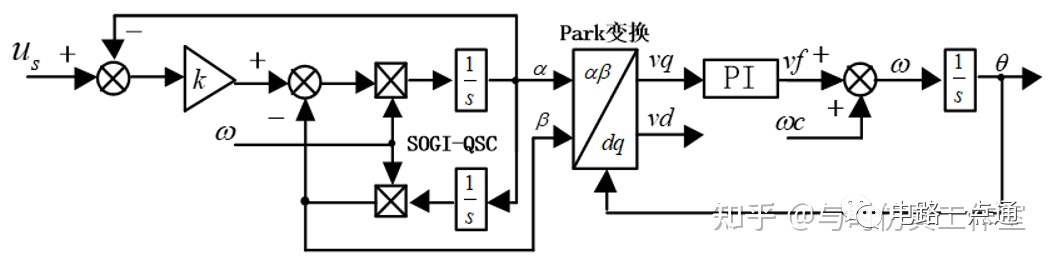
SOGI-PLL算法框图
双闭环PI平均电流控制
控制器由电压环和电流环组成,根据对电流环的控制又可分为峰值电流控制,滞环电流控制和平均电流控制。双闭环PI算法的电流环控制也叫做平均电流控制,控制器利用 PI 消除误差。
双闭环PI控制的核心,是通过输出占空比对开关管进行控制,调节电感电流的幅值和相位来控制输出电压。首先,根据输出电压采样电路采集到的输出电压与基准电压进行比较,生成输出电压误差信号。电压误差信号与输入电压相乘,生成基准电流信号,参考电流信号既具有输入电压的幅值和相位信息,也包含了输出电压的信息。通过电流采样电路采集到的电感电流与基准电流信号进行比较,最后通过电流环PI控制器生成占空比信号。
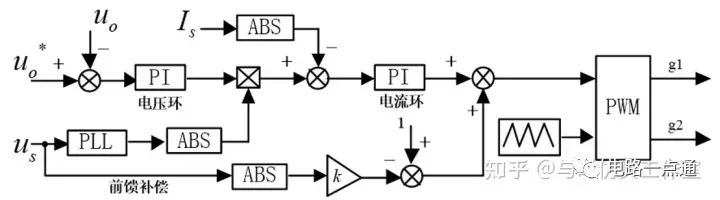
对于PFC双闭环PI控制,应该先设计内环,再设计外环;外环的输出为内环的输入,因此内环要快于外环。在控制系统稳定为前提下,内环需要快速响应,外环需要满足抗干扰性。
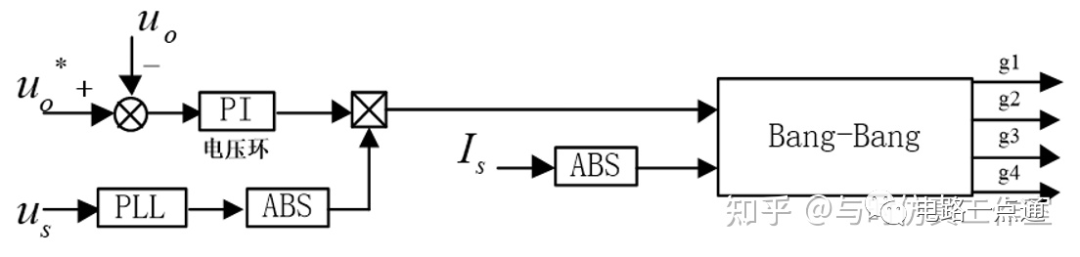
滞环电流控制(Bang-Bang)
滞环电流控制参考了CSDN论坛上的一篇博文,题目双向dcdc变换器simulink仿真_国产滞环电流控制的无桥图腾柱PFC介绍 第二部分:CCM和CRM PFC的实现原理和仿真模型》。我们在此基础上设计了滞环电流控制算法如下,并完成了仿真验证。
基于dq旋转坐标系解耦的控制
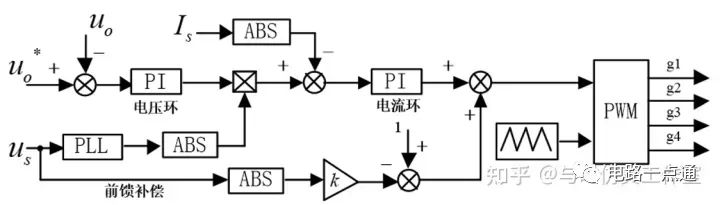
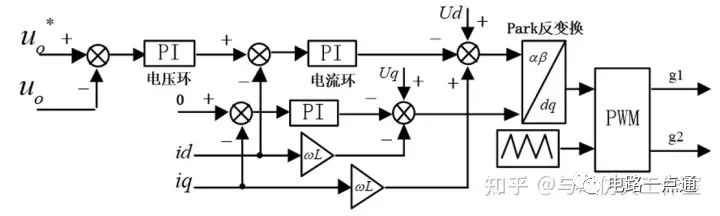
查阅了相关的专利和文献,发现基于dq旋转坐标系解耦的双闭环控制算法可以用到图腾柱上,因此设计了如下的控制算法,其控制框架与单相PWM整流器相似,dq轴双闭环PI控制,电流内环解耦,并采用电压前馈。
仿真结果
针对上面提到的图腾柱(MOSFET+二极管)和图腾柱(快管+慢管)两种图腾柱PFC电路,以及双闭环PI平均电流控制、滞环电流控制(Bang-Bang)、基于dq旋转坐标系解耦的控制三种算法,均进行了相应的仿真验证。下面仅列出图腾柱(MOSFET+二极管)PFC电路双闭环PI平均电流控制算法的仿真结果。
整流输出稳定的DC400V。
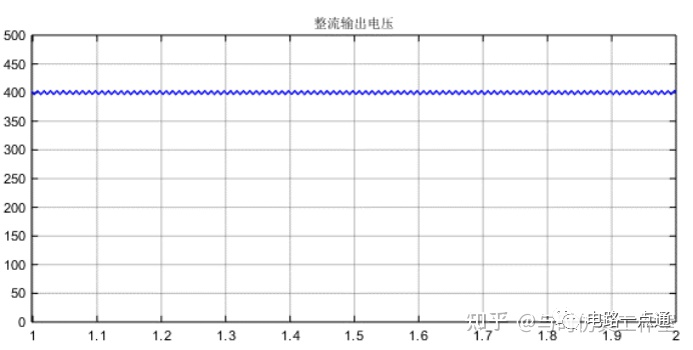
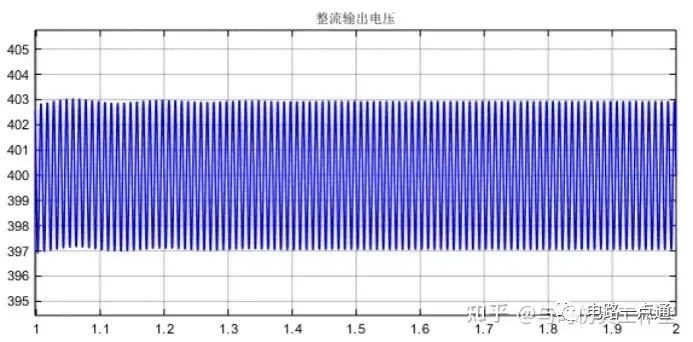
整流输出电压
整流输出电压峰峰值6V,符合电压纹波1.5% 的设计目标。
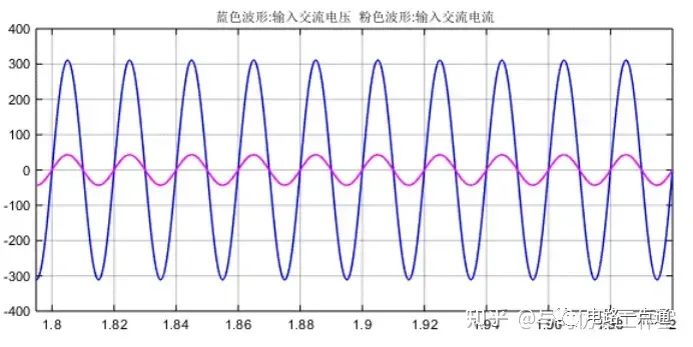
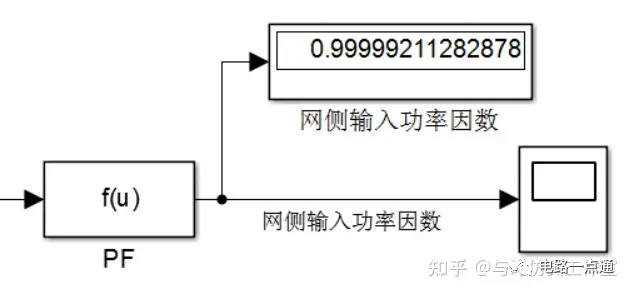
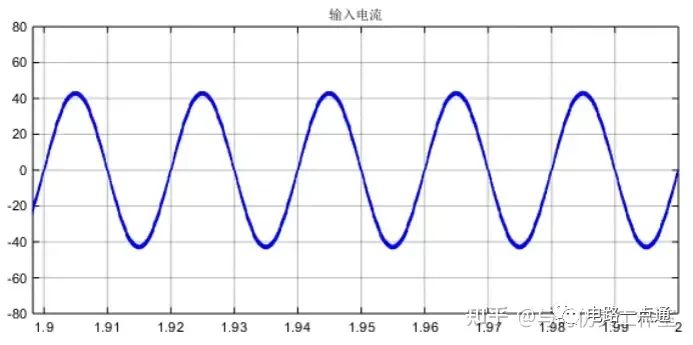
输入电压电流同相位,功率因数大于0.99,符合PF>0.99的控制目标。
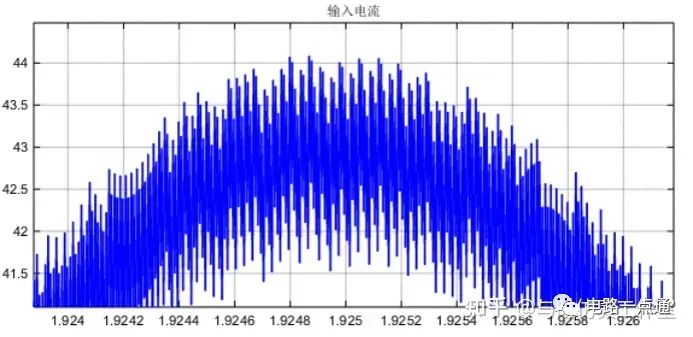
输入最大纹波电流2.6A,符合输入电流纹波系数0.05的设计目标。
输入电流谐波畸变率2.48%,符合THD<3%的设计目标。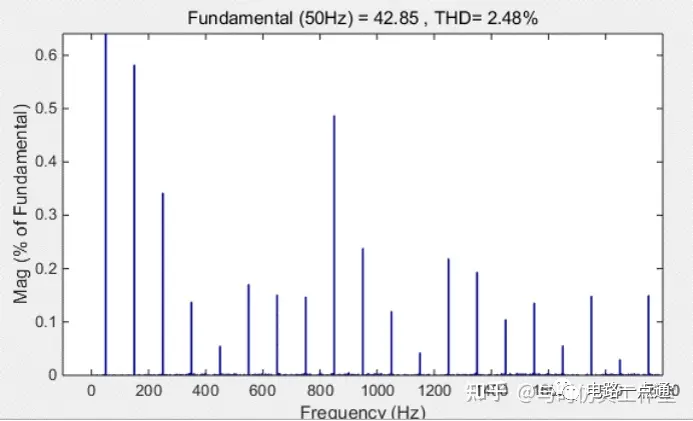
小结
针对目前电动汽车车载充电机的热门应用电路——图腾柱PFC,对“MOSFET+二极管”和“快管+慢管”两种图腾柱PFC电路设计了双闭环PI平均电流控制、滞环电流控制(Bang-Bang)和基于dq旋转坐标系解耦的控制三种控制算法,并进行了仿真验证,仿真结果符合设计目标。
 0
0