
背景介绍:
“ROS”、“MQTT”和“PX4的uORB”都是“发布和订阅模型”,应用在不同领域:机器人组件间通信、物联网IoT和无人机。
不论从哪个应用入手,学会一个都能很快举一反三搞定另外两个。
因为从通信协议的角度看,他们都是“有自己的报文构成规则”、都是“发布订阅模型”。
本文就以 PX4 的 uORB 为例给小白们带个路儿。
(示例代码按架构拆开讲是本文的特点,按架构看代码是读代码的正确方法。代码不是一行一行看,而是一块一块看)。
正文开始

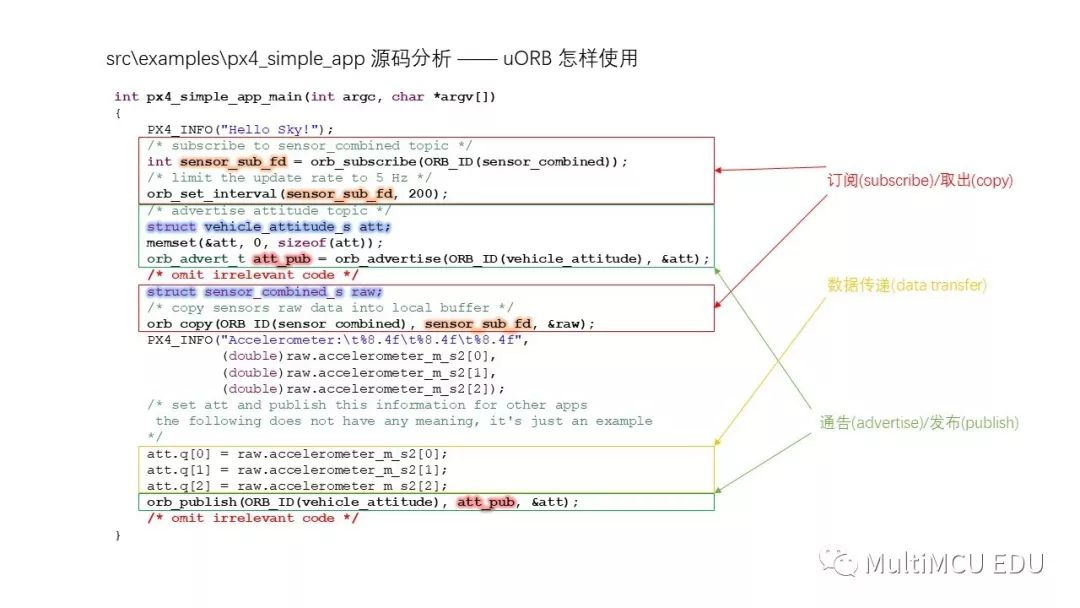
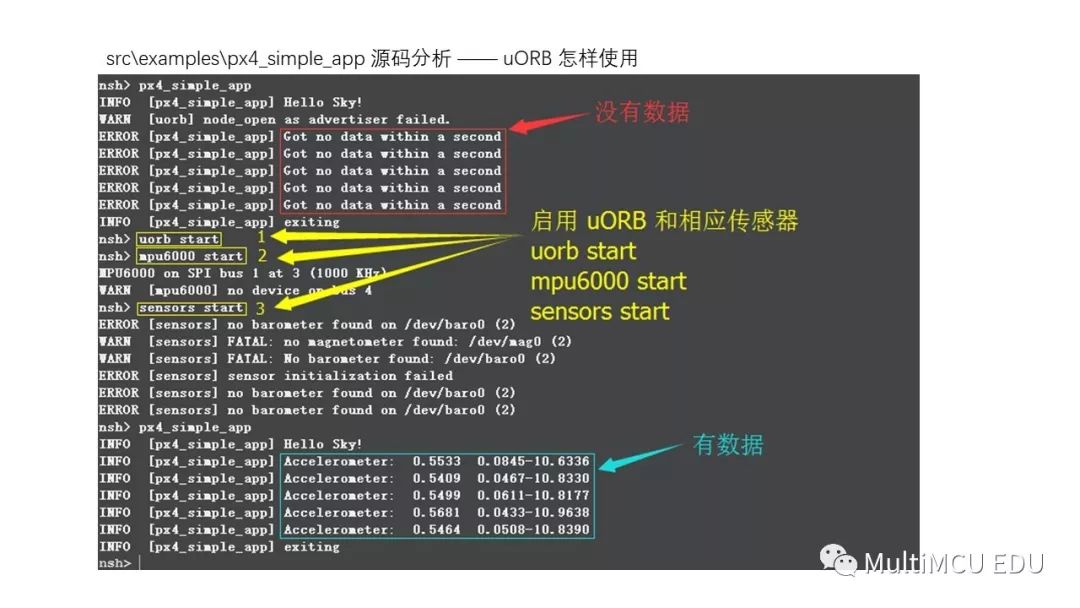
下图将 px4_simple_app_main 代码与 uORB 无关的代码从架构上拆掉。
只留下 uORB 相关内容并加注解。
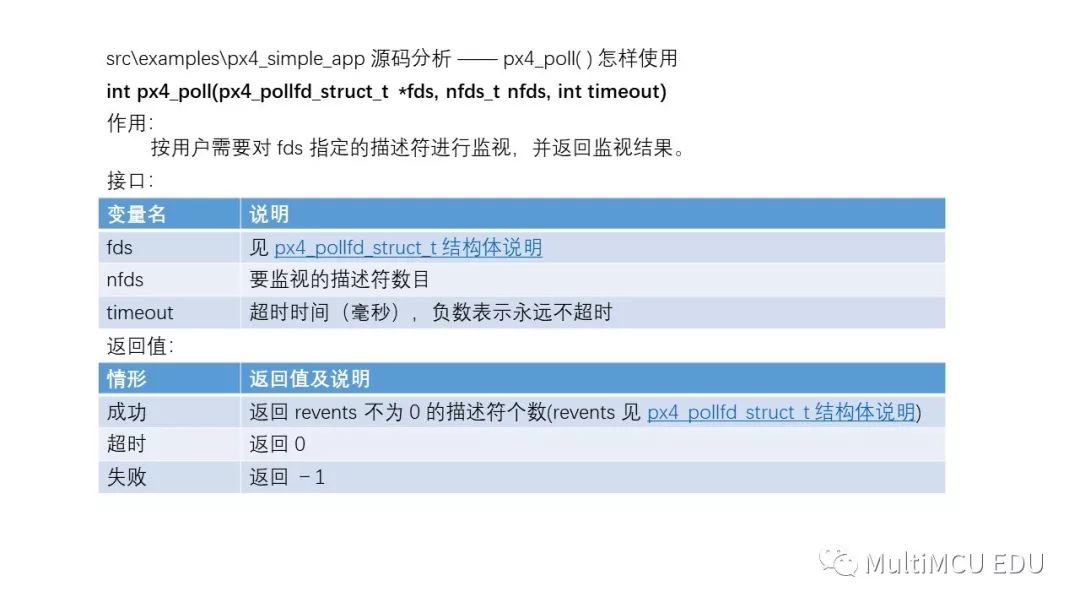
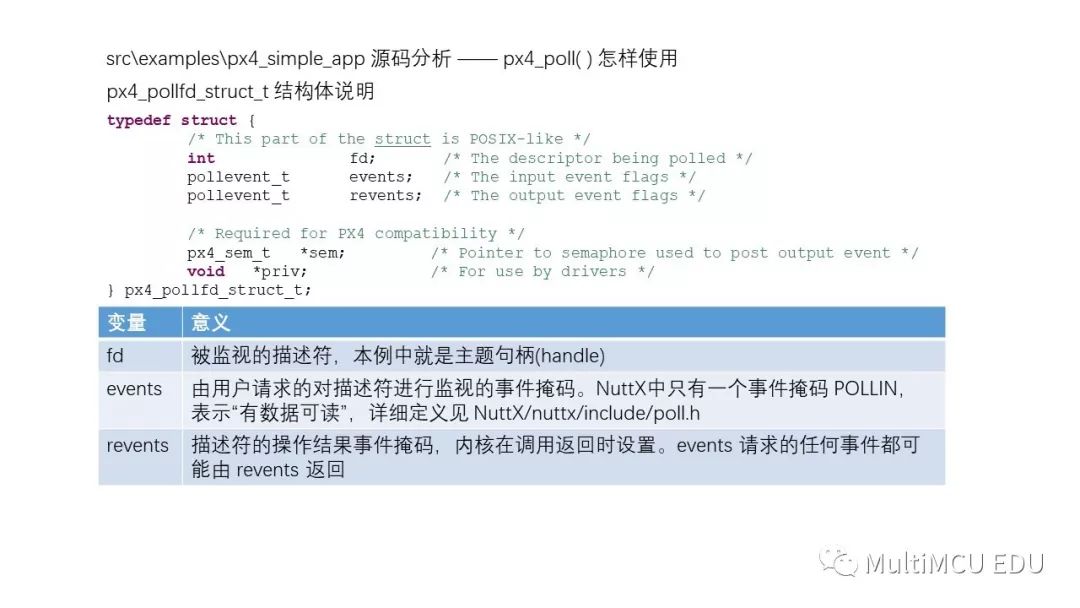
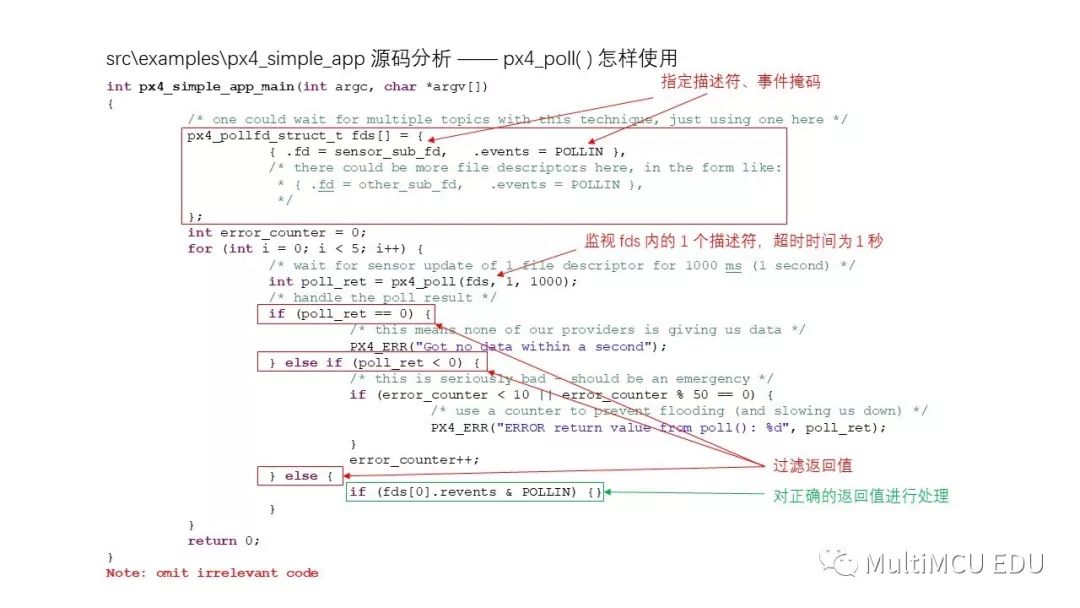
还是 px4_simple_app_main 的代码,这次将与 px4_poll() 无关的代码从架构上拆掉。
只留下 px4_poll() 相关内容并加注解。
 0
0









