
最近找到一本很好看的控制论主题的书,名字叫《The Fundamentals of control theory》。还很薄,只有一百五十多页。学习这本书真是一举两得,既能够学习一些控制论,还能够练习英语。
本文主要是我在学完线性时不变系统那节后,为了加深记忆和理解所记录的笔记。如标题所示,主要内容是线性时不变系统(LTI,linear time-invariant system)的三个性质。
在具体展开前,先介绍下背景吧。线性时不变系统是传递函数的第一小节,只有符合线性时不变性质的系统才能用传递函数的。那为啥非得用传递函数描述系统呢?因为简单。我们可以用任何方式描述系统的,如文字啦、图片啦还有方程;用方程的也有不少选择,如微分方程等。如果我们的目的是为了设计一个需要的工程系统,那么只用文字图片进行系统行为描述是完全行不通的,因为没有可操作性。所以方程成了主要系统行为描述工具,而微分方程求解是非常复杂的,所以为了简化就有了传递函数和状态空间表达式两种方式,一般称前者为古典控制论,后者为现代控制论。在原书中,作者对此做了举例解释,解释了为什么用文字及图片主要描述系统对于设计系统没有用处、用微分方程描述系统是如何的复杂。而传递函数是全书的第二章,第一章比较抽象,回头会再整理下以加深记忆。
如果我们描述系统行为时,把该系统当作线性时不变系统描述时,将大大简化工作。这样,你可以用的数学运算就只有六种了!见图1.如何你只用这六种运算的任意组合去描述系统的话,那么你将能够确定,输入的变化将会导致输出的怎样变化。这是因为线性时不变系统具有三个性质,齐次性、叠加性和时不变特性。正是这些性质让输出的行为变得可预测。下面分别介绍这三种性质。
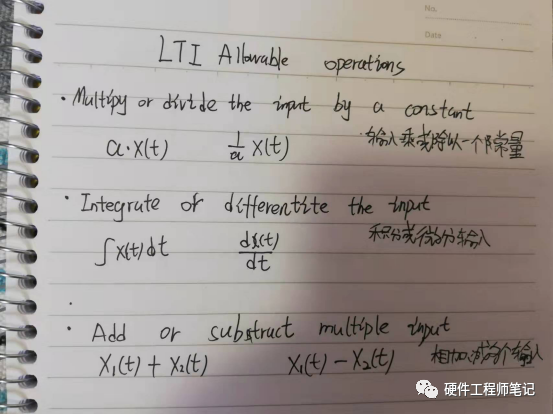
图1
任何线性系统都具有齐次性和叠加性。我理解着,齐次性就是输入乘以一个常数后,输出就会乘以同样的常数。叠加行是两组输入和输出,如果两个输入相加,那么就等于每个输入对应的输出分别相加。这么描述可能太不准确了,详细解释见图2,3。
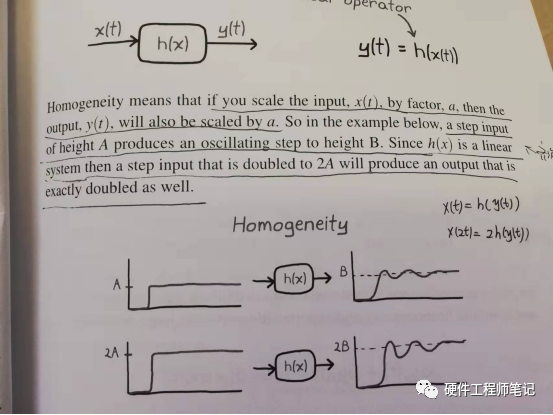
图2
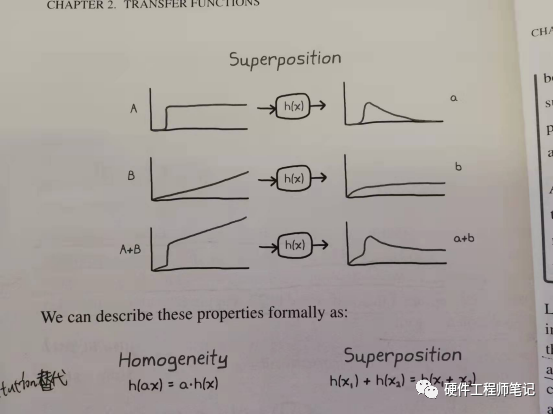
图3
如果一种系统具有这两种性质就可以认为它是线性的了。像电路里面的电阻电容电感就都是线性元件,因为描述他们电流电压关系的方程具有这两种性质。
作者特别提到,线性方程和线性系统是两回事。描述线性系统时,它是两个矢量即输入和输出的映射,映射关系满足齐次性和叠加性时,我们称其为线性系统。而线性方程是一种代数描述,这里每项都是变量的一次方乘以一个常数。见图4,直线方程不符合齐次性的一个例子。
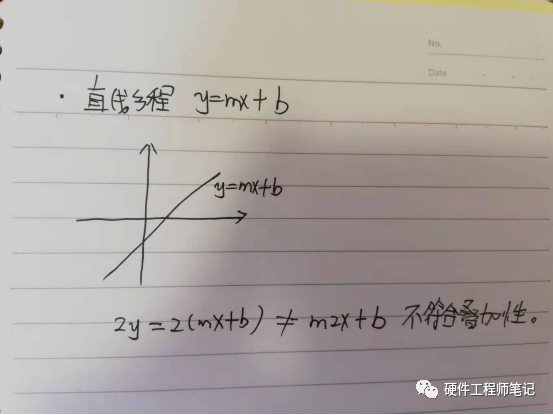
图4(不符合齐次性,图中有误)
另一部分是时不变特性,指的是不管什么时间,系统发生的行为都是一样的。有时候也指的是不管系统在任何地方、任何行为发生的行为都是一样的。见图5
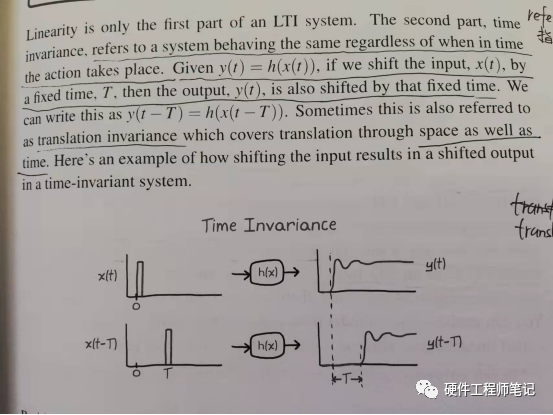
图5
以上就是线性系统的三个性质了,齐次性、叠加性和时不变。可见线性时不变系统的限制是非常严重的,因为真实物理系统中同时满足这三种性质几乎是没有的。见图6,弹簧只在一定长度伸缩是基本满足线性系统的,超过这个长度伸缩就不再是线性系统了。
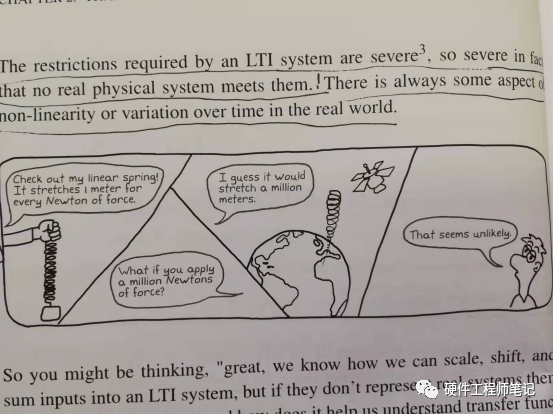
图6
那如果真实物理系统基本都无法满足线性系统的三条性质,那我们为什么学习它呢?它重要在哪里、又对理解传递函数有啥用处呢?它的重要性正如物理学家费曼所说,”linear system is important because we can solve them”.我们有很多数学工具可以求解线性系统,如果是非线性系统,就只能求解一些最简单的了。即使真实物理系统不符合LTI要求的条件,我们也有方法让它近似成为线性系统,如模拟电路中的小信号就是这样,信号比较小时,在二极管等这类非线性元件偏置点附近工作,我们是可以把它看作线性系统的,见图7。即在这个区域内,它是可以非常近似成线性系统的。还有一种近似成线性系统的方法是线性化,本书后面章节会讲,比如最小二乘法应该算吧。至于它为什么对于理解传递函数有帮助,即定义传递函数为什么都会要求系统是线性的,后面的脉冲函数章节会有解释。
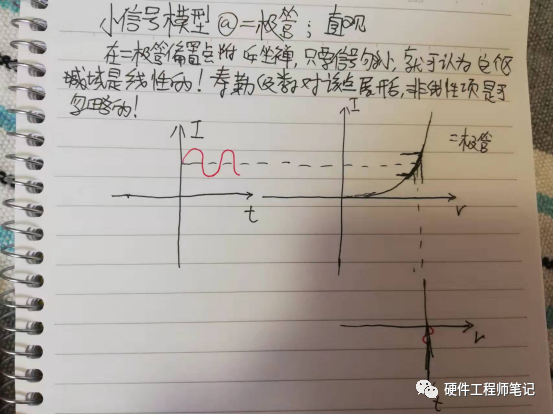
图7
 0
0







