
作为一种成熟的卫星导航系统,GPS(全球定位系统)技术目前已经被初步应用在各行各业中,其应用前景也非常广阔。
GPS系统由三部分组成:空间部分——各轨道卫星;地面部分——运行控制系统;用户部分——GPS接收机。空间和控制部分由美国军方设计和控制,用户部分主要是各种型号的GPS接收机。
自从GPS全部建成以后,它将昼夜不停地发送导航信息,在在地址的任何时间和任何地方实现定位。用户接收机的功能是接收GPS卫星发送的导航信号,恢复载波信号频率和卫星钟,解调出卫星星历、卫星钟校正参数等数据。通过测量本地时钟与恢复的卫星钟之间的时延来测量伪距并进行修正。采用经典导航定位算法或卡尔曼滤波定位算法,由四颗卫星定出用户的位置。
GPS接收机主要由天线/低噪声前置放大器、GPS接收机变频和相关通道、微处理器系统组成。系统构成如图1所示。
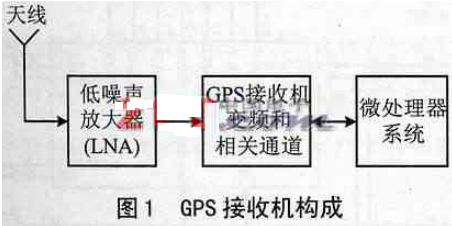
其中核心部分是微处理器系统。特别是在高动态应用中,由于对多通道连续跟踪,数据运算处理量大,处理器部分往往成为整个接收机性能的瓶颈。因此选择什么样的处理器将直接影响到GPS接收机的成本及性能,如运算速度、定位精度、功耗等。本文将探讨采用Atmel公司的ARM核微控制器AT91R40008设计高动态GPS接收机。
1 GPS接收机整体方案设计
1.1 GPS接收机设计原理
GPS接收机由信号接收、信号变频、信号相关、信号处理和存储及接口等几大模块组成。原理框图如图2所示。
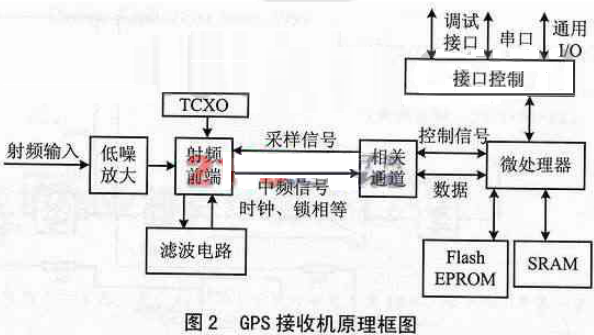
如图2所示,导航信号由天线接收,经过低哭声前置放大,进入射频前端。射频前端具有变频作用,将射频信号转换为中频信号。中频信号经采样信号采样、量化后,转换为数字中频信号。数字中频信号进入相关通道,经过处理后,解译出导航电文。微处理器接收导航电文数据,进行相应处理后给出所需的定位信息或提供特定的应用服务。
本设计中,射频前前和相关通道部分选用英国Zarlink半地体公司生产的GP2015和GP2021芯片。其中,GP2015是12通道相关器。微处理器采用Atmel公司生产的32位ARM核微控制器AT91R40008。
1.2 ARM核微控制器AT91R40008
AT91微控制器是Atmel公司继AT89、AT90(AVR)系列单片机后,推出的基于国际领先32位RISC处理器核ARM的高端嵌入式系统芯片。AT91R40008含有256KB的片内32位宽SRAM,在66MHz下运行片内SRAM可用于影像应用软件或存储数据,在最小系统功耗下得到最高性能。为了使功耗最小,用户可在加载内部SRAM以后,禁止外部非易失性存储器。
2 GPS接收机硬件设计
所有的本振频率和数字钟信号都是由GP2015内的锁相环(PLL)产生的。GP2015有一个内置的晶体振荡环路,只需外置一个晶体振荡器,这个晶振的稳定性对整个接收机有着非常重要的影响。只有温补晶振才能达到要求,本设计中的晶体振荡器采用TCXO 4080,它的稳定度能达到10 -8。
采用以ARM7TDMI为内核的微控制器AT91R40008。AT91R40008含有256KB的片内32位SRAM,可用于影像应用软件或存储数据。考虑到应用软件的大小及算法复杂度对内存的需求,本设计中扩展了一片片外SRAM。该SRAM的容量最高中扩展到1MB,选用Cypress公司生产的CY7C1041,由片选信号NCS1选通,容量为512KB。
Flash是快速闪存,存储由主机通过调试口或串口下载来的程序代码。本设计选用AMD公司生产的AM29LV400,这是一个512KB容量的Flash EPROM芯片,由片选信号NCS0选通。
接收机与部有两种 通信接口:一种是JTAG接口,连接JTAG仿真器,使用集成开发环境配合JTAG仿真器进行开发调试、下载用户程序等,非常方便;另一种是通用串口,共有两个,一个用于与主机通信 ,一个用于GPS数据输出。
3 GPS接收机软件设计
GPS接收机是软硬件结合的电路。相关通道接收变频器产生二位数据流,对其进行解调、解扩,得到导航电文信息。微处理器对相关通道进行控制,完成对相关通道数据的读取、判断、运算,对它本身的工作参数设定等。
GP2021具有12个相关处理通道,每个相关处理通道的电路都相同且各自独立,最多能同时接收12颗卫星的信号。每个相关通道主要由一个载波锁定环路和一个C/A码延时锁定环路组成。载波锁定环路用来跟踪卫星信号载波频率和载波相位,使环路中载波数控振荡器产生的本地参考信号频率与卫星信号载波频率保持相等,且相位差接近于零,达到载波同步。在载波同步的情况下就可以对BPSK信号进行解调,得到基带信号。伪码延时锁定环路用来使本地C/A码的相位,与接收机GPS卫星中的C/A码相位保持同相,以实现对卫星信号的解扩和伪距离测量。
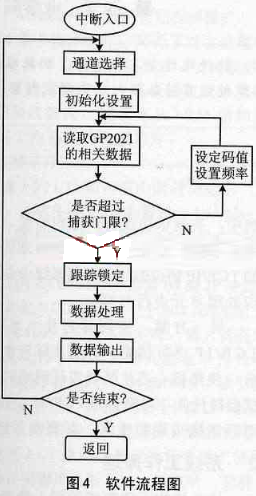
应用程序通过写相关器GP2021相应的豁口而对其进行控制,相关器根据其控制豁口的内容进行相应的解调、解扩等工作。在每个时钟取样信号时刻,测量值锁定在相应的数据寄存器里,同时产生中断信号。微处理器运行在循环等状态,发生中断后,向处理器将读取相应数据寄存器的测量值,然后进行数据运算处理处理完毕后,输出结果,最后返回到循环等待状态,等待下一次中断。中断处理程序流程图如图4所示。
结语
按此设计制成的高动态GPS接收机经过试验检验,完全消除了以往微处理器的瓶颈效应。在66MHz下运行时,可以达到55.4MIPS的性能,完全满足系统运行奈。最突出的特点是体积小、功耗低。微控制器AT91R40008的封装尺寸仅为16mm×16mm,最大功耗(在从内部SRAM取指令运行时)为0.73mW/MHz(在25℃测得),在66MHz下运行时功耗仅为55mW。这在高动态GPS接收机的实际应用中非常有意义。
 0
0







