
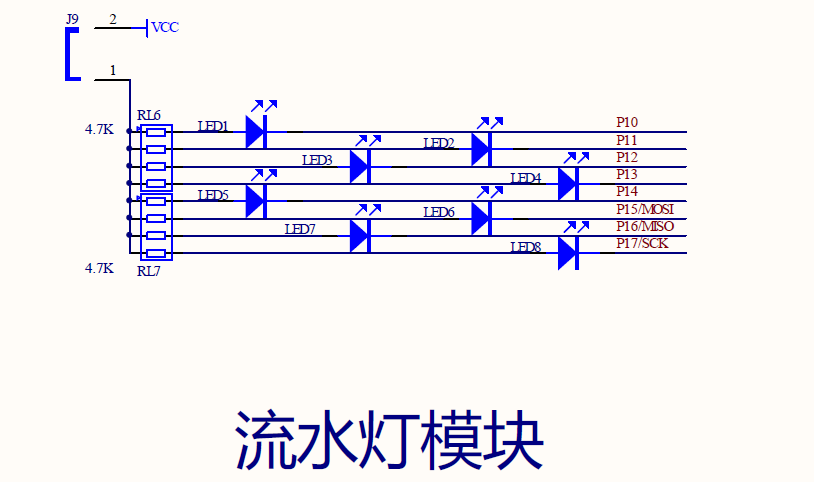
首先,介绍下原理。下图为主控芯片和流水灯模块的原理图。流水灯模块接在单片机的P1口,由原理图可以知道,在P1口给一个低电平即可点亮LED灯。相反,如果要LED灯熄灭,就要把P1口的电平变为高电平即可。要实现流水灯功能,我们只要将LED1~LED8依次点亮、熄灭,依始类推,8只LED变会一亮一暗的做流水灯了。
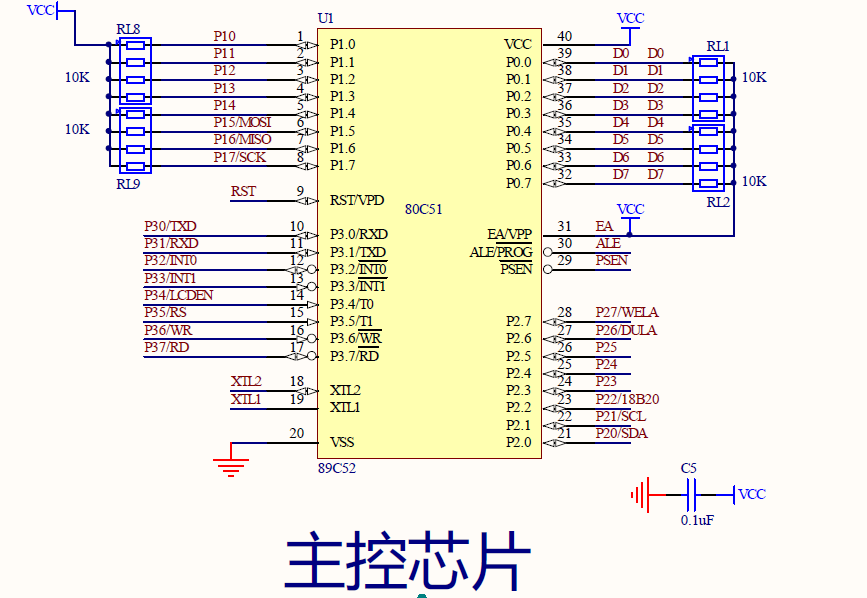
实现8个LED流水灯程序用中文表示为:P1.0低、延时、P1.0高、P1.1低、延时、P1.1高、P1.2低、延时、P1.2高、P1.3低、延时、P1.3高、P1.4低、延时、P1.4高、P1.5低、延时、P1.5高、P1.6低、延时、P1.6高、P1.7低、延时、P1.7高、返回到开始、程序结束。
听起来是不是很简单啊!那么下面我们来看下实现流水灯功能的三种常用方法!
第一种,总线方法实现流水灯。
这是一种比较笨但又最易理解的方法,采用顺序程序结构,用位指令控制P1口的每一个位输出高低电平,加上延时函数,即可控制每个LED灯的亮灭。C程序如下:
#include
#define uchar unsigned char
#define uint unsigned int
code unsigned char tmpled[8]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f}; //定义八只LED灯,依次点亮八只LED灯
//N毫秒的延时函数
delay_ms(uint ms)
{
uint i,j;
for(i=ms;i>0;i--)
for(j=114;j>0;j--);
return 0;
}
void main(void){unchar i;while (1){for(i=0;i<8;i ) //循环点亮8只LED灯{P1=tmpled[i];delay_ms(500); //延时500毫秒}}}
第二种,移位方法实现流水灯
上一种方法是逐个将P1口的LED灯点亮来实现闲的,因此程序看起来有一点复杂。下面将一种用移位的方法。采用循环程序结构编程。首先在程序开始给P1.0口送一个低电平,其它位为高。然后延时一段时间再让低电平往高位移动,这样就实现“流水”的效果了。下面来看具体程序:
#include
#define uchar unsigned char
#define uint unsigned int
//N毫秒的延时函数
delay_ms(uint ms)
{
uint i,j;
for(i=ms;i>0;i--)
for(j=114;j>0;j--);
return 0;
}
void main(){uchar a,i;while(1){a=0xfe; //点亮第一位LED灯for(i=0;i<8;i ){P1=a;a=a<<1; //左移一位a=a|0x01; //左移一位后与0x01相或,保证左移后最低位为1 delay_ms(500); }}}
第三种,库函数实现流水灯
C52 提供了 _crol_(字符循环左移);_cror_ (字符循环右移)等库函数,包含在头文件intrins.h中。接下来还是先讲一下移位的小知识点吧。
左移。C52中操作符为“<<”,每执行一次左移指令,被操作的数将最高位移入单片机PSW寄存器的CY位。CY位中原来的数丢弃,最低位补0,其他位依次向左移动一位。相信大家学过C语言都清楚吧,这里就不多说了。而函数_crol_的作用是循环左移。它会将最高位移入最低位,其他位依次向左移一位。用法:x=0xfe;x=_crol_(x,1);//循环左移移位。接下来看具体程序:
#include
#include
#define uchar unsigned char
#define uint unsigned int
//N毫秒的延时函数
delay_ms(uint ms)
{
uint i,j;
for(i=ms;i>0;i--)
for(j=114;j>0;j--);
return 0;
}
void main(){uint a;a=0xfe;while(1){P1=a;a=_crol_(a,1); delay_ms(500);}}
知识点:PSW寄存器。
PSW(Program StatusWord)全称为程序状态字标志寄存器,是一个8位寄存器,位于单片机片内的特殊功能寄存器区,字节地址D0H,用来存放运算结果的一些特征,如有无进位、借位等。使用汇编编程时PSW寄存器很有用,但在利用C语言编程时,编译器会自动控制该寄存器,很少人为操作它,大家只需做简单了解即可。其每位的具体含义
如图1 所示:
 图 1 PWD(Program Status Word)寄存器
图 1 PWD(Program Status Word)寄存器
①CY:进位标志位,它表示运算是否有进位(或借位)。如果操作结果在最高位有进位(加法)或者借位(减法),则该位为1,否则为0。
②AC:辅助进位标志,又称半进位标志,它指两个8位数运算低四位是否有半进位,即低四位相加(或相减)是否进位(或借位),如有,则AC为1,否则为0。
③F0:由用户使用的一个状态标志位,可用软件来使它置1或清0;也可由软件来测试它,以控制程序的流向。
④RS1、RS0:4组工作寄存器区选择控制位。在汇编语言中这两位用来选择4组工作寄存器区中的哪一组为当前工作寄存区。
⑤OV:溢出标志位,反映带符号数的运算结果是否有溢出。有溢出时,此位为1,否则为0。
⑥P:奇偶标志位,反映累加器ACC内容的奇偶性,如果ACC中的运算结果有偶数个l(如11001100B,其中有4个1),则P为0,否则P为1。
 0
0







