
蜂鸣器是很常见的设备,分为无源和有源两种。根据项目需求选择不同类型的蜂鸣器。最近的项目里有用到有源蜂鸣器对有源蜂鸣器。还是老一套,把电路板画完,接着编程。
在项目中原理图如下:
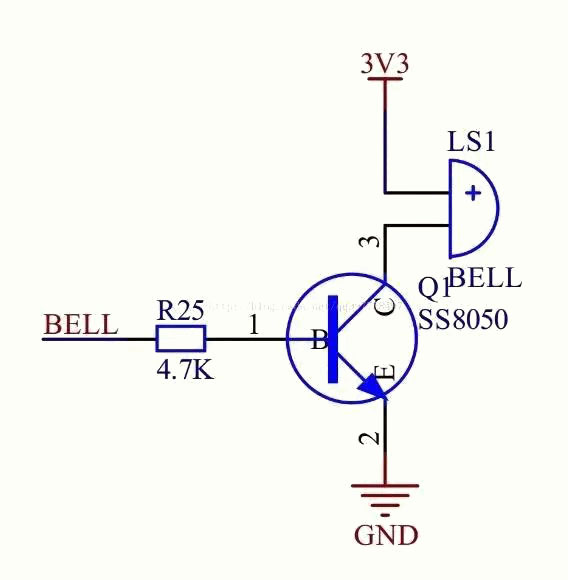
如果不能保证I/O的输出性能可以根据情况增加上拉或者下拉电阻。
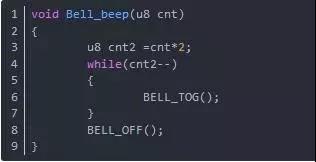
切入正题:在程序里面这个蜂鸣器的驱动就是个高低电平驱动。高电平三极管导通、蜂鸣器发声,低电平三极管关断、蜂鸣器不发声。这的确很简单,程序上最开始我是这样写的:
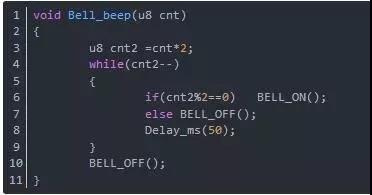
当然,如果单片机没有很好的I/O跳变函数也可以这样修改:
这里稍作解释:
1)
函数功能:蜂鸣器发声驱动
传入参数:蜂鸣器发声的次数
2)
传入的次数cnt需要再函数内翻倍。这是因为传入的参数是想让蜂鸣器连续的发cnt声。但是蜂鸣器除了发声还有不发声的时候。也就是说蜂鸣器每响一次都需要关闭一次,如果没有关闭操作肯定就不会出现响几声而是连续的响一声,这个也很容易推理。
3)
在while循环完之后需要加一个蜂鸣器关闭操作。
这里假如传进的参数是2,目的是让蜂鸣器响两声。根据程序的执行步骤:
cnt2变成4。
第1次while(4) 蜂鸣器开 cnt自减到3
第2次while(3) 蜂鸣器关 cnt自减到2
第3次while(2) 蜂鸣器开 cnt自减到1
第4次while(1) 蜂鸣器关 cnt自减到0
第5次while(0) 跳出while
可以看出其实在while之后蜂鸣器状态已经是关闭的了,但是保险起见,确保函数调用完之后蜂鸣器是关闭的状态。比如第一个函数I/O跳变的就更需要保障了,因为代码上只能看出跳变,看不到跳变之后的状态。
至此,一个简单的蜂鸣器电路和驱动程序就都温习完了,接下来上干货:
在写程序的时候很多时候讲究程序的效率,比如这个蜂鸣器驱动,驱动过程中会降低效率,厉害的人很快能看出来,就是这个Delay延时的问题。但是上面也说了,不延时也是不行的。所以趋于效率我尝试着换了一种方法驱动蜂鸣器。
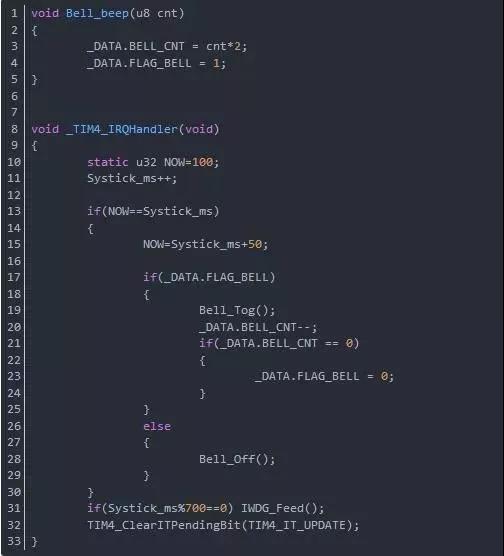
代码如下:
实现起来也很简单,简单说下原理:
1)首先是提供蜂鸣器驱动的I/O配置,
2)其次是定时器的配置
3)最后是定时器中断函数实现
我选用的定时器是项目单片机中最简单的一个定时器,配制成1ms中断,能够提供溢出中断。其实这个定时器我常用做计系统运行时间Systick_ms。但是该项目对这个系统时间没有用到,那就用这个定时器做文章把。
实现方法:
1、同样函数在调用蜂鸣器驱动的时候接口是一样的,传入的参数还是蜂鸣器的响声次数。
2、函数体变了,这里改成了两个变量的赋值,第一个BELL_CNT同普通方法中的cnt2,这里不再赘述。第二个是FLAG_BELL是用来保存蜂鸣器是否需要驱动的状态变量。所以既然是调用驱动函数,那肯定这个变量要为真。
3、定时器中断函数里面加上了一个静态变量NOW,他的作用就是和Systic_ms产生一个50ms的时间片,干嘛用?肯定是给蜂鸣器开关之间的延时用咯。模拟软件延时嘛。然后再来分析下这段代码:
1)首先这个NOW和Systic_ms是无条件需要赋值保证50ms时间片的。对应的代码为NOW=Systick_ms 50;
2)判断蜂鸣器驱动状态变量是不是真,如果不为真就关闭蜂鸣器,这个也是无条件的。
3)如果状态变量为真:蜂鸣器先跳变Bell_Tog();当然如果没有这个跳变函数也可以用上述的判断cnt的方法,就不多写了都是一样的。同时次数自减BELL_CNT--;同时判断是不是减到0了,减到0了说明响完了啊,那就把状态变量赋值为假。再次进来不管蜂鸣器是开着的还是关着的都会执行关闭操作,这个跟上面说的保险一样。
4)最后,这两个变量用的是全局变量,这里是以结构体的形式呈现的,因为很多情况这两个函数不在一个C里面。如果硬要写在一个C可以忽略本条。
 0
0







