
-
什么是相位噪声
通俗地讲:相位噪声是指在信号的相位上存在的不确定性或波动性。这种噪声通常是由于信号源内部的物理过程(如热运动和机械振动)以及外部环境的影响(如温度和压力的变化)所引起的。
在理想情况下,时域上,信号将是纯净的理想正弦波。在频域上,它看起来像一条没有宽度但有波幅的谱线,如下图所示:
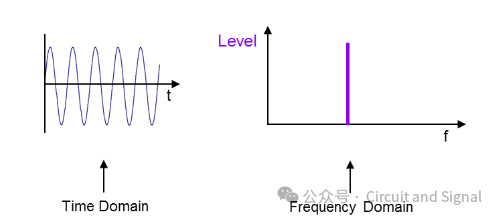 它不会有相位噪声或幅度噪声。此信号将被定义为:
它不会有相位噪声或幅度噪声。此信号将被定义为:
A是信号幅度,w是频率
但现实世界中不存在如此完美的信号,信号的幅度以及信号的相位上总会有一定量的噪声(波动),相位噪声会将信号功率扩展到相邻频率,如下图所示:
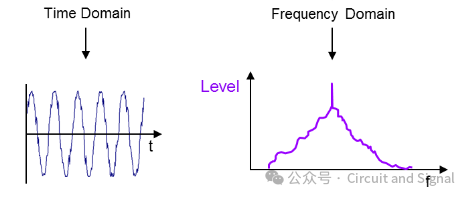
这种噪声的效果用公式可以表达为:

相位噪声在频域中扩展信号频谱,相当于时域中的抖动,这一点我们后续再讨论。
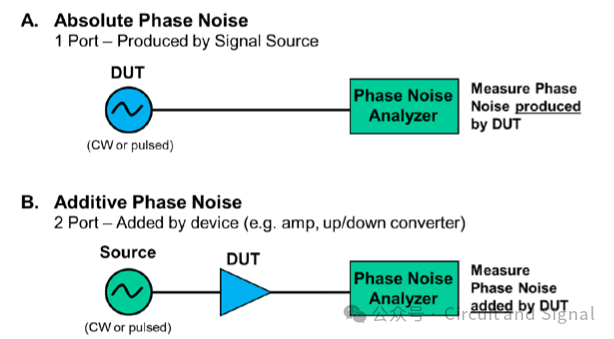
相位噪声通常在产生信号的设备上测量,基本上是某种振荡器。这种类型的相位噪声测量称为绝对相位噪声或 1 端口相位噪声,如下图A. 这里的目标是确定被测器件 (DUT) 实际产生了多少相位噪声。第二个相当常见的测量是加性相位噪声(也称残余相位噪声)。通常,当添加 2 端口器件(例如放大器或上/下变频器)时,人们会想知道该器件为信号增加了多少相位噪声如下图B。
-
与 Jitter 的关系
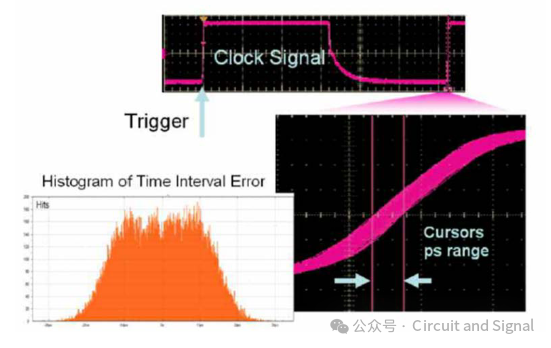
相位噪声是一种频域现象,在时域中对应的是抖动。抖动历来是用示波器测量的,示波器在时域中进行测量。示波器可以直接测量抖动,在测量时间间隔误差、周期抖动方面非常灵活,并提供不同的抖动表达方式。
那这就有一个问题:由于相噪和抖动是不同域下对同一现象的解释,既然已经有示波器可以直接观测时域行为,为什么还要去频域分析它的”孪生兄弟“?原因如下:
时域技术有两个限制:灵敏度和成本。示波器有一个抖动测量底限。意思是说低于这个底线的抖动它就无法捕捉测量。对于一般示波器来说,这个底限通常在皮秒范围内,有些非常高端的示波器可以测量低至 100 飞秒的抖动。另一个原因就是这类示波器非常昂贵,花这么大的成本不值得。于是人们就想到时域不可行,那频域行不行(同一事物的2个观察域)?
幸运的是,相位噪声技术(频域方法)可以以极高的灵敏度测量抖动。抖动测量可能远低于 10 飞秒 (1 fs = 10-15 s),这比典型的示波器要灵敏得多。人们不但可以获得这种灵敏度水平,而且相位噪声分析仪的成本几乎低了两个数量级。再一个优点是相位噪声图可以轻松区分随机和确定性抖动,而使用示波器较难区分。相位噪声分析仪的一个限制是它只能查看具有规则模式的 clocks 或 data streams。它不适用于随机数据流,这是由测量方法和随机数据流的特征决定的,简而言之:随机数据流多变,没有参考性可言。
-
相位噪声为什么重要
相位噪声在各种应用中都很重要,它通常是调制器和发射器中必不可少的术语,是必须讨论的内容,但它在接收器中也同样重要。此外,相位噪声会对数字系统和雷达系统产生重大影响,以下是一些简单的示例。
-
数字调制系统
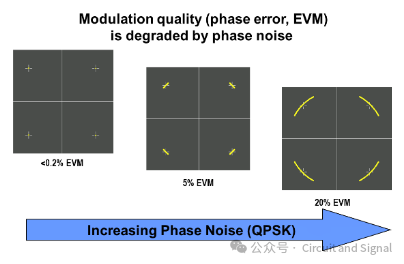
对于数字调制系统,发射机相位噪声可能是调制质量的限制因素。相位噪声增加导致不同级别的 EVM 会降低信号质量并扩展码源。在这个示例中,20% 的 EVM 将突破 QPSK 系统可以处理的极限,然后将误差引入发射机。重要的是要认识到这些误差将经过信道到达接收器,在那里信号将进一步削弱,这就导致更大的风险。因此,较大限度地降低发射机相位噪声对于设计成功至关重要。
-
通信系统发射机
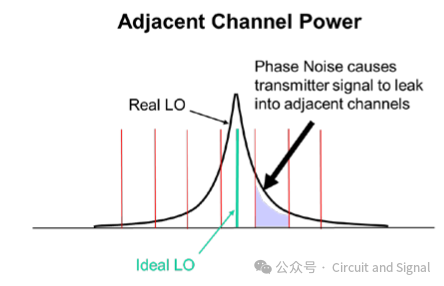
在通信系统中,相噪除了降低发射机调制质量外,相位噪声还会分散频谱。这可能导致能量泄漏到相邻通道中。大多数通信标准都定义了允许泄漏到相邻信道的信号量限制,如下图所示:
-
接收机
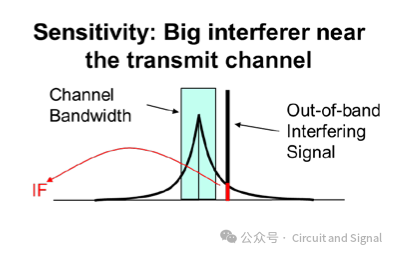
虽然相位噪声在发射机中很明显,但在接收器中却经常被忽视。接收机内部本振 (LO) 的相位噪声需要考虑到整个系统的设计中。如果 LO 的相位噪声增加了信号宽度,则即使是信道外的interfering signal也可以映射到中频 (IF) 并降低接收器的整体灵敏度。
-
雷达系统
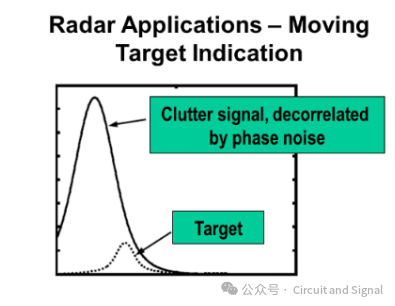
雷达系统试图接收来自目标的非常微弱的反射。但可能会有杂乱无章的东西,从而产生非常大的反射。如果该反射的宽度因雷达内部 LO 相位噪声的增加而退化得足够大,那么它就会掩盖目标,进而无法接受到目标信号,如下图所示:
-
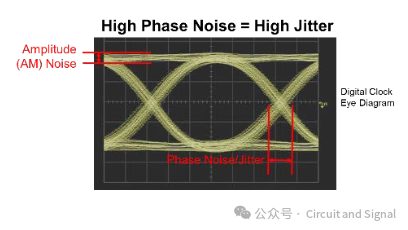
高速数字系统
在数字世界中,相位噪声通常称为抖动。需要注意的是,抖动是眼图质量的限制因素。当抖动变得很高时,它会导致误码并降低或限制可持续的数据速率。随着数字系统速率的提高,这一点变得越来越重要。
-
量化相位噪声
相位噪声通常表示为 L(f), 几年前,IEEE 将相位噪声重新定义为相位波动频谱密度 Sφ (f), 或 L(f) = ½ Sφ(f).
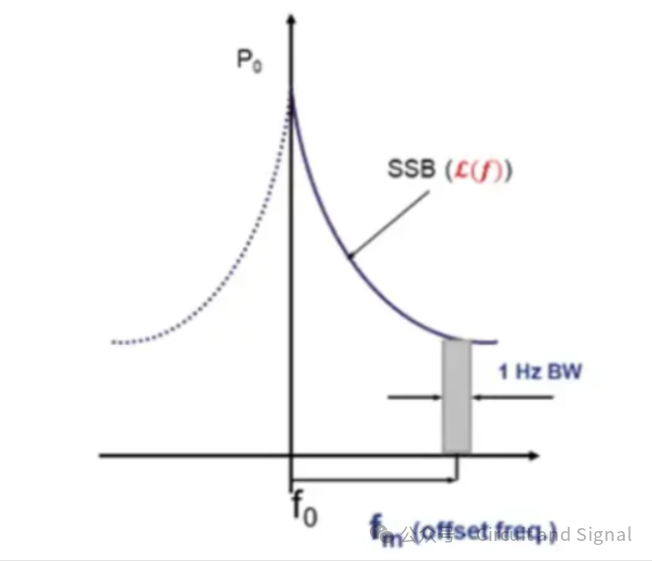
由于噪声能量边带对称地出现在载波周围,因此在单边带上进行测量足以获得相位噪声。在旧定义中,相噪被定义为在载波(f0)的指定频偏 fm下,由于 1Hz 带宽中的相位波动而导致的单边带功率,结果以 dBc/Hz 为单位。
在许多情况下,事实证明,这两个定义对于正常的低相位噪声振荡器是等效的。只有当相位噪声变得非常高并且调制指数达到边带能量被推到边带频率的倍数时,两者才会不一致。
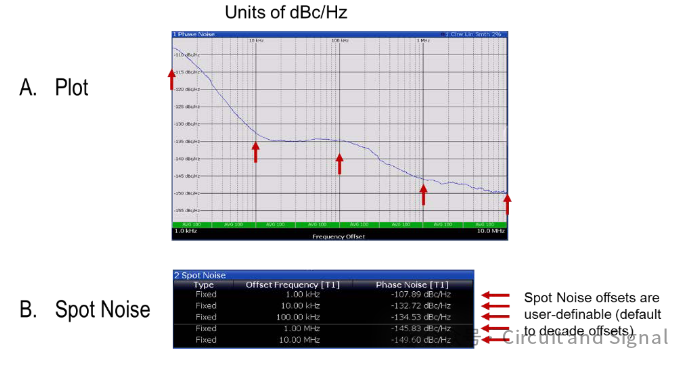
相位噪声如下图A所示。通常,绘图从起始偏移量变为停止偏移量,并且这些偏移频率(X轴)以对数标记,Y 轴上是 dBc/Hz。第二个术语“点噪声”等同于将标记放在该图上,以测量该特定偏移处的 dBc/Hz 数。大多数相位噪声分析仪都提供点噪声表,用户可以在其中定义特定的偏移量(图B)。
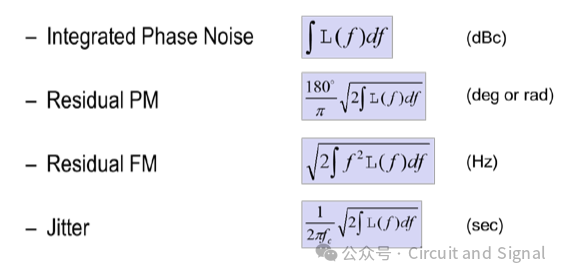
除了测量原始相位噪声外,很多时候还对所谓的“残余噪声”感兴趣。以下项基于相位噪声曲线来计算:
-
特征相位噪声曲线
一开始我们讲了产生相噪的可能因素,当各种因素放在一起时,会产生我们熟悉的特征相位噪声曲线,如下图所示:这些因素导致相噪产生的可能性并不确定,具体取决于振荡器等的类型和设计
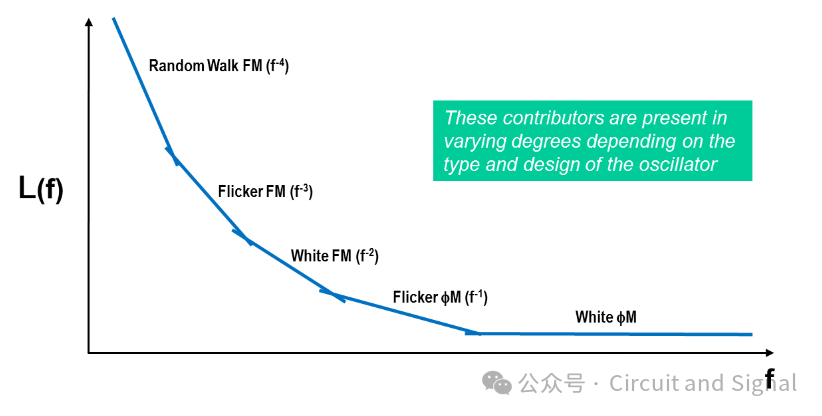
Random Walk: Close to carrier, generally caused by environmental effects
Flicker FM: Related to active oscillator physical resonance mechanism, power supply noise
White FM: Related to passive resonator oscillators
Flicker φM: Related to noisy amplifiers and multipliers
White φM: Far from carrier, generally caused by broadband output amplifier noise
参考资料:
-
Rohde_Schwarz File
-
相位噪声是什么? 相位噪声为什么重要?如何快速、准确地测量微波相位噪声?
-
解密相位噪声,优化测试效率.
******
岁月易逝,转眼已是2025,不管2024如何,2025我们阔步向前!
诸事繁杂,文章只能不定期更新,有遇到不明白之总结一下。
诸君若有感兴趣投稿者,可后台联系我,每周1-2篇,内容不限。由于经济能力有限,当下每篇稿件也只能回馈作者一杯咖啡或者奶茶,后续慢慢提高。
******
 0
0







