
一. FOC之使用Cordic算法求解sin/cos
在进行坐标变换的时候,需要计算角度的正余弦值,而在FPGA中是不能直接进行求解的,需要采用其它的方式进行求解。最常使用的方法有如下两种:
-
基于ROM的查找表方式: 首先在PC上使用python等高级语言将一个周期内的正余弦值全部计算出来,角度的分辨率根据实际需求来确定,分辨率越精细,那么需要存储ROM的深度就越深,反之约小,然后将计算出来的正余弦值进行一个扩大取整保留数据精度,最后按照角度顺序依次存入ROM中。很明显,通过这种方式计算正余弦值所需要的时钟周期特别短,消耗FPGA的存储资源大。
-
基于Cordic算法计算: Cordic算法并不直接求解正余弦值,而且通过旋转逼近的思想来进行拟合正余弦函数。该算法拟合的精度非常高,因而被广泛应用于计算机图形学、数字信号处理等领域。
Cordic算法运算过程中,只设计到移位和加减运算,这种运算是非常适合于FPGA的,从面积和计算速度两方面进行综合考虑,最终选择占用面积较小、计算速度略低的Cordic算法来求解sin/cos函数值。
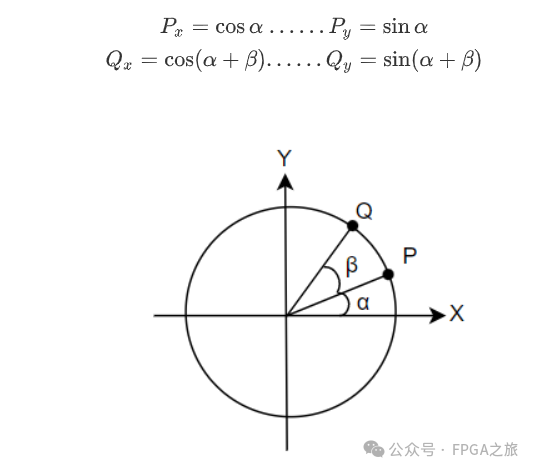
首先如下图所示,假设单位圆上有任意两点Q和P,它们之间的角度关系已知,则它们的XY轴坐标可以表示如下:
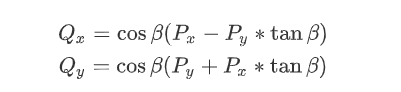
将Q点的坐标公式进行展开,然后再将P点的坐标公式代入其中可得:

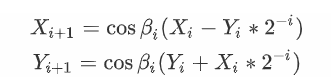
为了统一变量类型,将cos函数作为公共相提取出来,可以得到如下形式:
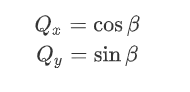
可以看出,由P点旋转至Q点后,Q点的最终表达式如上所示,这种形式便是Cordic算法旋转的基本公式了。如果将旋转初始点P设置为一个特殊位置:X轴上,那么很明显Q点的坐标值就是对应旋转角度的正余弦值。
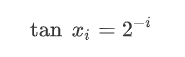
有了上述基本推论,就可以开始真正的进行旋转拟合了。P点直接一步旋转到Q点,肯定是不可取的。如果将P点经过多次旋转,每一次旋转的角度均为特殊角度,tan函数对应的角度值如下,这样就将乘法运算巧妙的转换成了左移运算。
每一次旋转迭代的公式如下,每一次旋转的公式里面还包括了cos函数,这也是不方便在FPGA内计算的,观察表达式可以知道,cos函数在这里起到的作用是对坐标值起到等比例缩放的作用,并不会影响旋转的点对应向量的方向。
所以可以将每一次旋转过程中的cos函数提取出来,最后进行运算,这样就不用参与到每次的旋转计算中去,由于旋转的角度是已知的,所以当确定好旋转次数后,可以将这部分运算提取计算出来,作为一个系数K,K的表达式如下图所示。

接下来就是需要研究每次旋转对应的角度值了,角度对应的tan函数值是已知的,可以通过Python直接求解出对应的角度,然后汇总成如下表格:
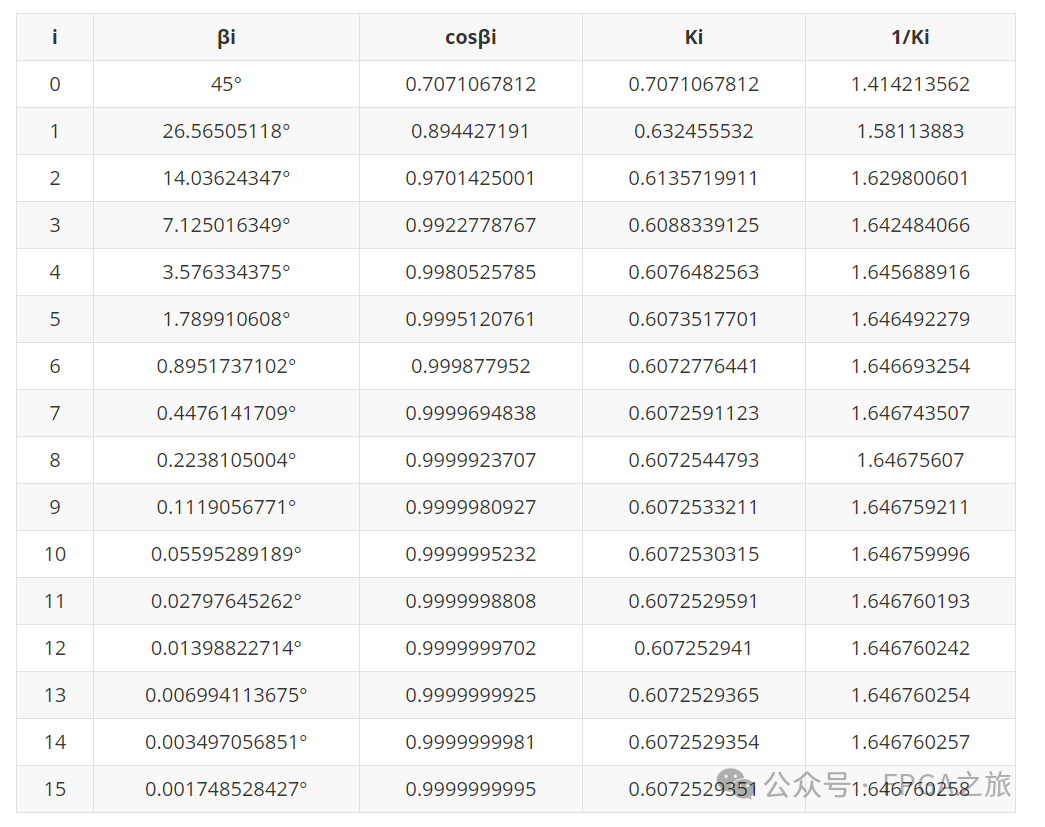
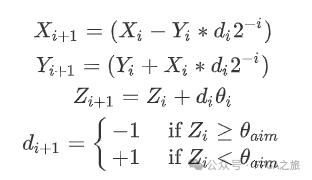
通过上表可以看出,当旋转到16次的时候,角度的误差只有千分之一了,而cosβ和K的值均趋近于一个定值,故Cordic旋转拟合是收敛的。在旋转的过程中,可能会出现旋转角度大于目标角度的情况,所以在旋转的过程中还需要增加一个变量d来控制旋转的方向,另外用z来表示旋转到的角度值,最终的旋转迭代公式如下:
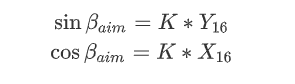
最终目标角度的正余弦值如下:
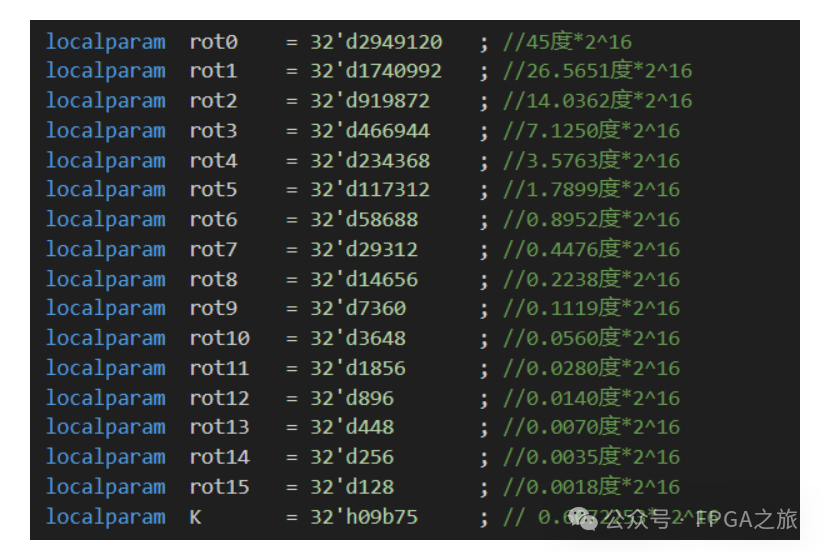
FPGA内部实现的过程中,需要对旋转角度值以及K值扩大2^16次方,然后取整,为的是在保持计算精度的情况下,免去数据的小数部分,这些都是固定值,不会根据目标角度的变化而变化,可以在程序中直接定义出来,如下图所示。
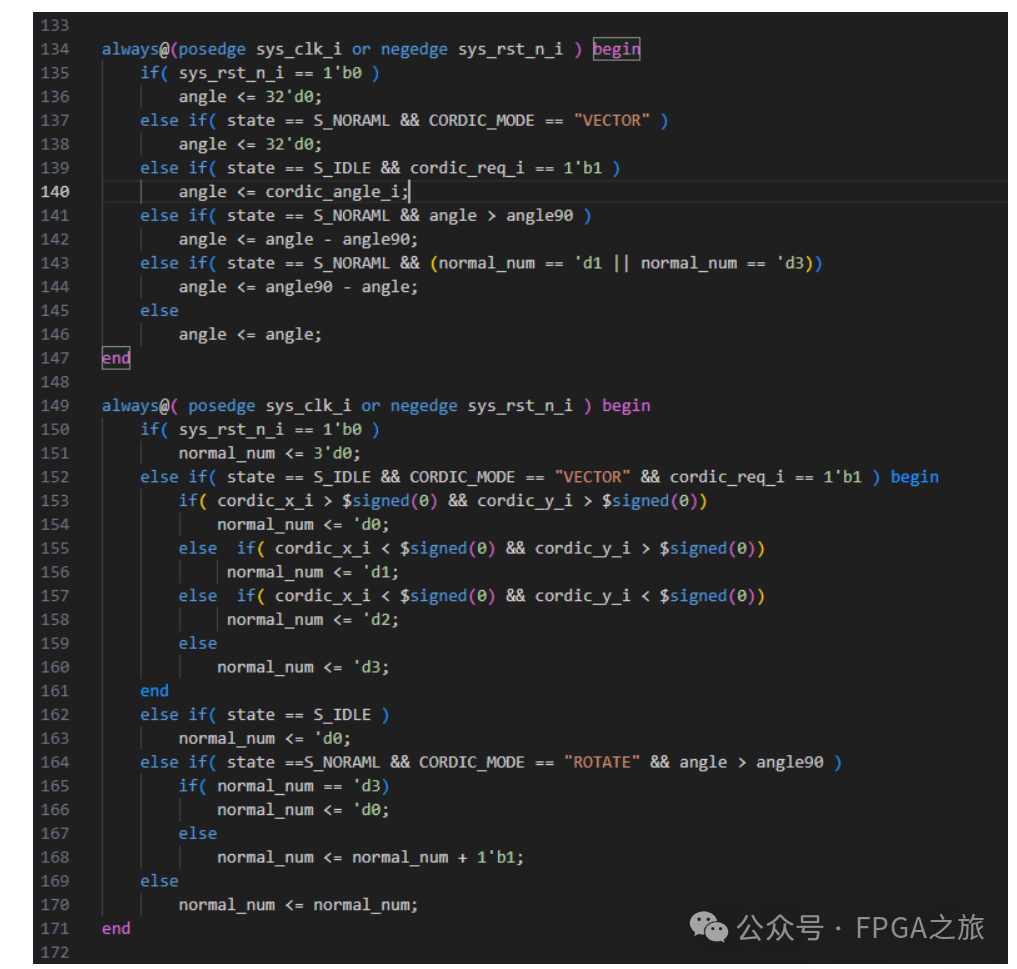
另外还要一个关键点需要注意的是迭代公式中使用的是tan函数,需要对目标角度限制在-90°到90°范围内,所以在目标角度输入模块之后,需要先对角度进行一个象限变换,为了处理的方便,本设计将目标角度变换到第一象限内,也就是0°到90°,如下图所示,象限变换不会影响正余弦数组的大小,只会影响其数值的符号,所以在迭代完成后,根据需要对坐标点进行取反运行即可。


 1
1








