
一、系统构成概览
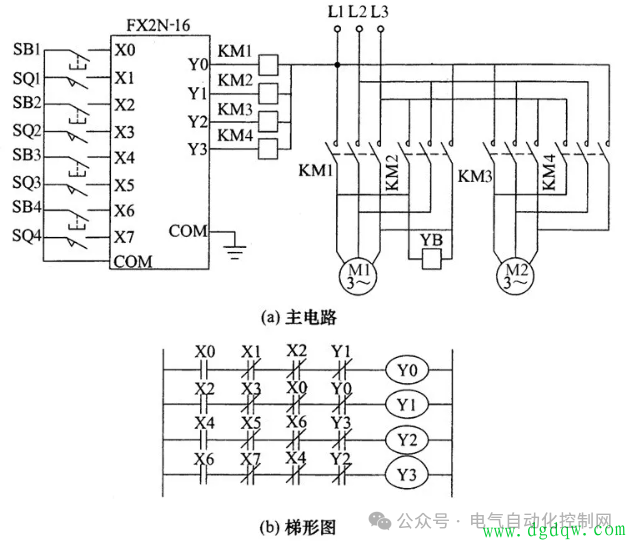
电葫芦系统核心由两台具备正反转功能的电动机驱动,用于实现重物的升降与水平移动。该系统通过PLC(可编程逻辑控制器)进行智能化控制。
-
升降机制:利用接触器KM1和KM2实现点动控制,分别驱动重物上升与下降。安全方面,设置了上下限位开关SQ1和SQ2,确保电葫芦在预设范围内运行。
-
行走机制:接触器KM3和KM4负责控制重物在水平方向上的左右移动,同样地,左右限位开关SQ3和SQ4用于防止电葫芦超出操作范围。
二、PLC控制逻辑详解
-
升降控制逻辑
-
PLC的输入信号X0与X2分别对应控制重物上升与下降的指令。
-
当接收到相应的输入信号时,PLC的输出点Y0和Y1被激活,分别驱动电葫芦上升或下降。
-
行走控制逻辑
-
PLC的输入信号X4与X6分别接收控制重物左移与右移的指令。
-
对应的,PLC的输出点Y2和Y3根据接收到的指令,控制电葫芦向左或向右移动。
-
系统实现流程
-
根据系统电气设计图纸,正确连接所有电路元件与PLC输入输出点。
-
编写并调试PLC控制程序,确保逻辑正确无误后,将其载入PLC中。
-
完成以上步骤后,PLC即可根据预设的逻辑对电葫芦进行精准控制,实现升降与行走功能。
通过上述解析,我们可以清晰地看到PLC在电葫芦控制系统中的核心作用,以及其如何通过接收指令、处理逻辑、输出控制信号,实现对电葫芦的智能化控制。
 0
0







