
什么是CAN:
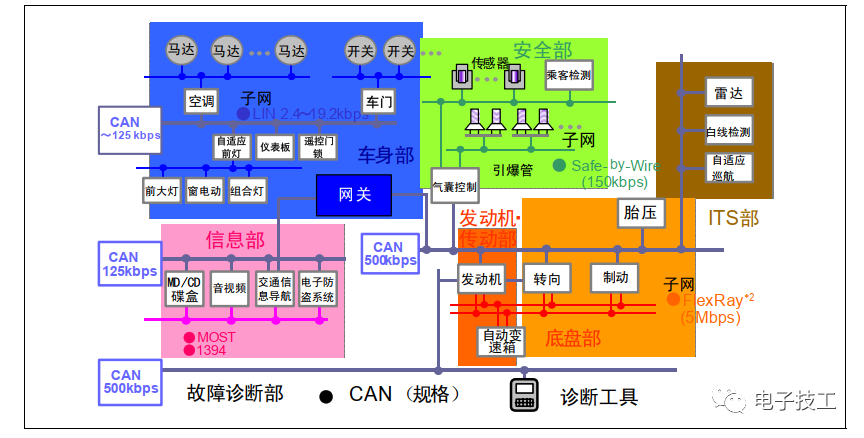
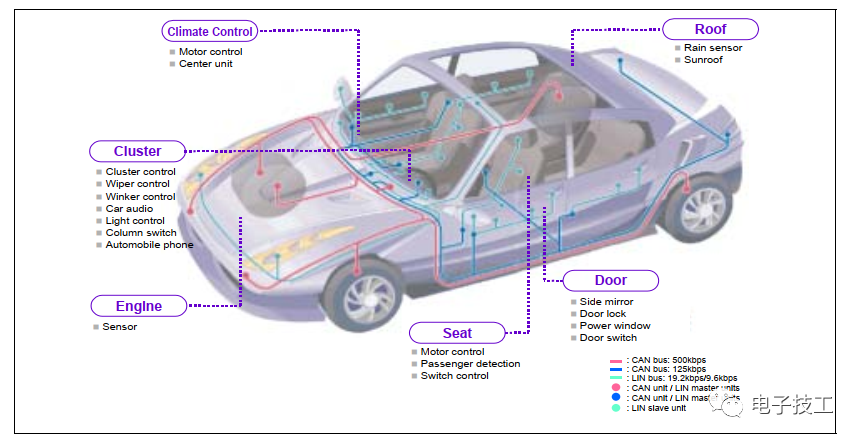
CAN(Controller Area Network,控制器局域网络 )是一种广泛用于汽车内部的串行异步通讯。下图是一些汽车中使用CAN总线的例子:
CAN有什么标准:
CAN标准:ISO11898(通信速度为 5kbps - 1Mbps 的 CAN 高速通信标准,其中CAN FD(Flexible Data-rate)纳入了ISO 11898-1:2015标准中)和ISO11519(通信速度为 125kbps 以下的 CAN 低速通信标准)。具体标准可以百度,或者私信我。
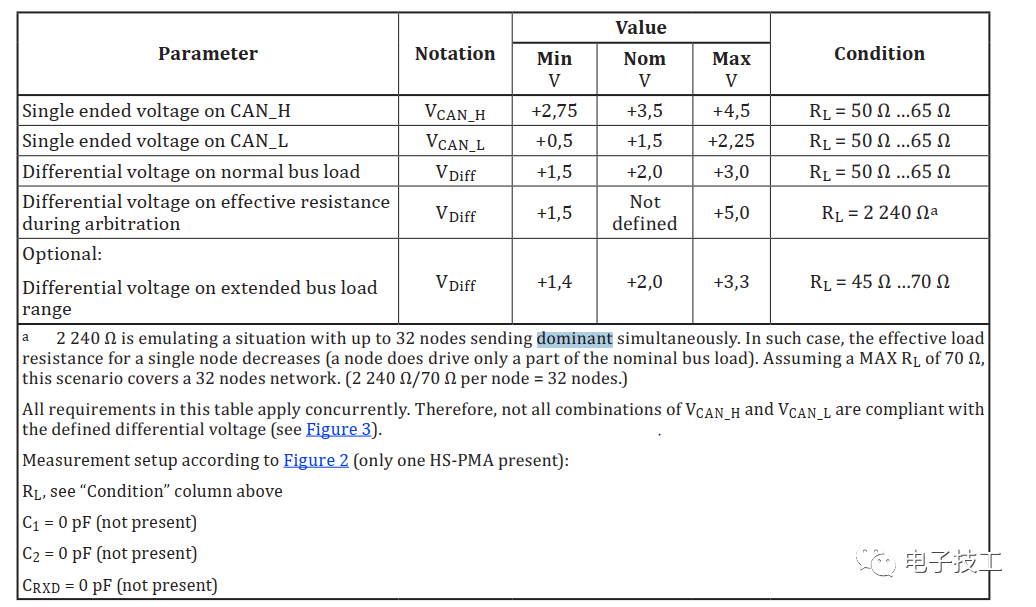
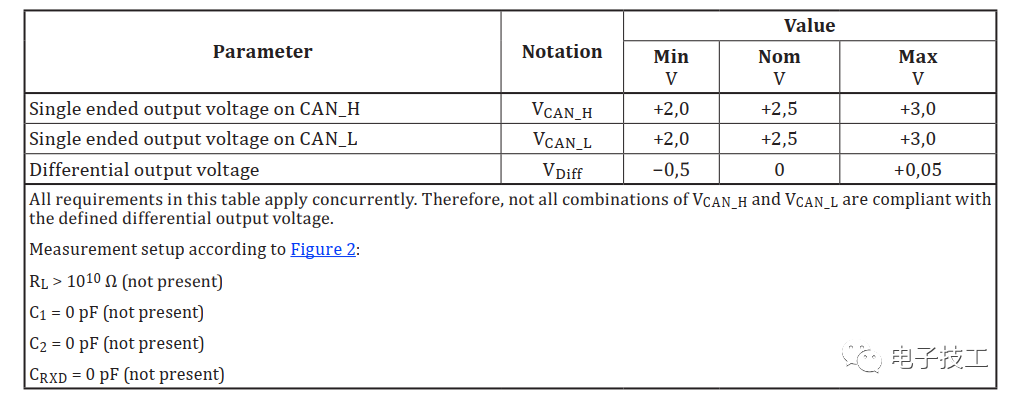
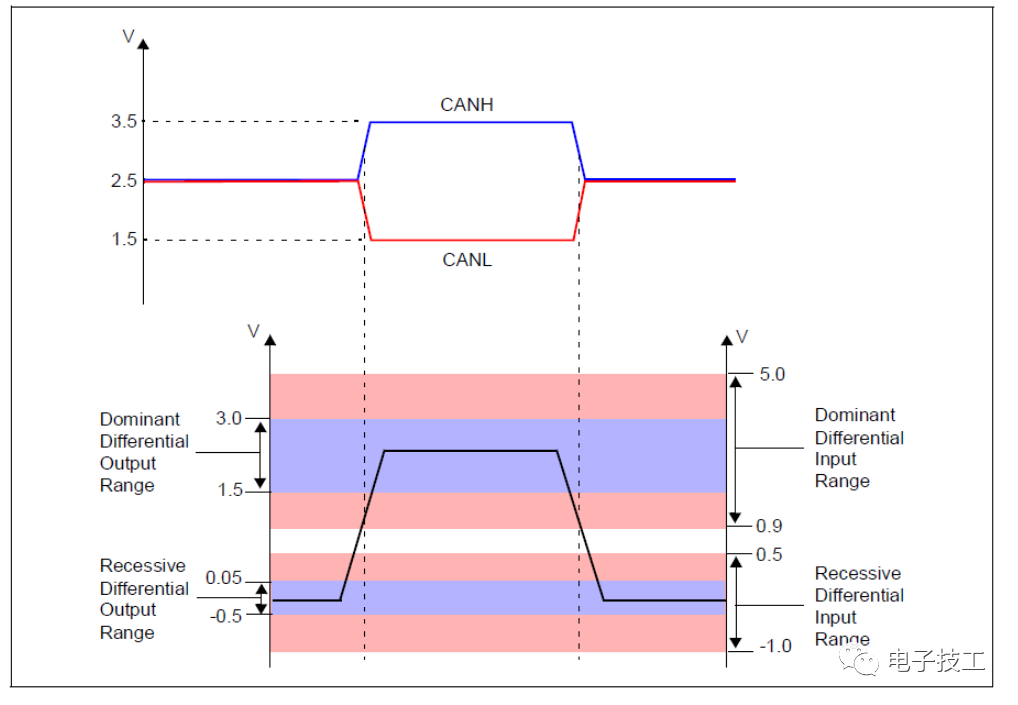
CAN的电压特性:CAN网络中的物理信号传输基于电压差的传输(差分信号传输)。高速CAN和低速CAN的电压差分电压大于0.9V时为显性电平,对应逻辑“0”,小于0.5V为隐性电平,对应逻辑“1”。以下为ISO11898中的标准参考:
CAN芯片的内部结构(原理):以下以NXP的CAN芯片作为例子来举例讲解:
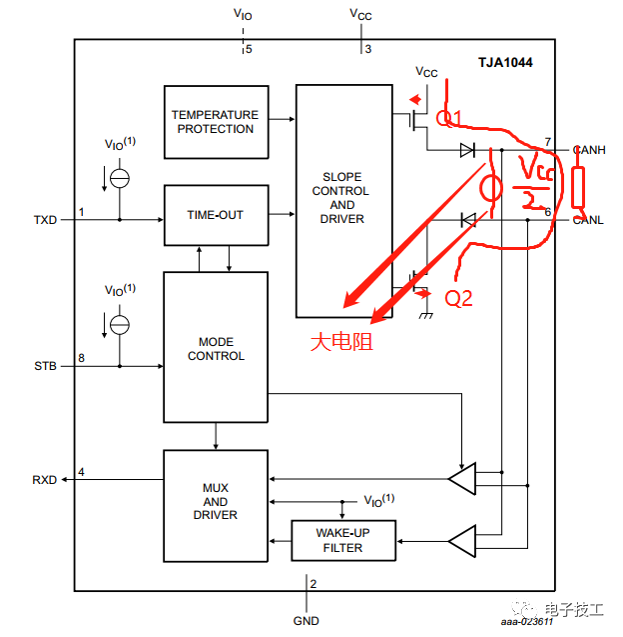
CAN收发器主要分为驱动器和收发器。TX引脚接收MCU的信号然后给驱动器到CANH,CANL引脚,CANH,CANL接收差分信号至接收器到RX引脚到MCU。
内部CANH、CANL分别为开漏输出形式。总线显性(0)时,收发器内部Q1、Q2导通(Transceiver发出high low的Q1,Q2的导通电平),CANH、CANL之间产生压差;隐性(1)时,Q1、Q2截止,CANH、CANL处于无源状态,压差为0(单独的CAN H/L 一般为VCC/2)。
|
CAN负载电阻 |
CANH-CANL差分电压 |
|
120Ω |
2.5V |
|
60Ω |
2V |
|
40Ω |
1.5V-1.7V |
|
30Ω |
1.1V-1.3V |
|
24Ω |
0.9V-1.1V |
差分(负载)电阻的作用:
1.在显性状态期间,总线的寄生电容会被充电,而在恢复到隐性状态时,这些电容需要放电。如果CANH、CANL之间没有放置任何阻性负载,电容只能通过收发器内部的差分电阻放电,这个阻抗是比较大的,放电时间就会明显比较长。因此,总线的终端电阻的第一作用是放电。
2.隐性时差分电阻阻值很大,内部的MOS管属于高阻态,外部的干扰只需要极小的能量即可令总线进入显性(一般的收发器显性门限最小电压仅500mV)。这个时候如果有差模干扰过来,总线上就会有明显的波动,而这些波动没有地方能够吸收掉他们,就会在总线上创造一个显性位出来。所以为提升总线隐性时的抗干扰能力,增加一个差分负载电阻,且阻值尽可能小,以杜绝大部分噪声能量的影响。然而,为了避免需要过大的电流总线才能进入显性,阻值也不能过小。
3.阻抗匹配,减小反射
CAN的数据帧:
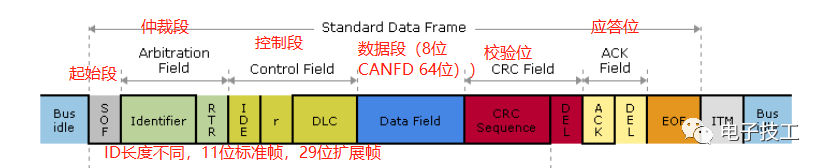
仲裁段:当总线上挂了多个负载的时候,通过仲裁段的电平来确定优先级,ID越小优先级别越高(CAN的线与机制,CAN显性的时候,MOS导通,强驱动。 CAN隐性的时候,MOS关闭,弱驱动。 )
控制段:识别扩展帧和标准帧,以及数据长度编码位
数据段:数据,CAN2.0 8位,CAN FD64位,这就是CAN FD速率更快的原因
校验位:当TX,RX收到的数据不一致进行校验。校验数据传输是否正确,若不正确,应答错误停止发送。
CAN的常见硬件错误排查:
1.当CAN连接节点较多的时候。由于节点较多,寄生电容较大,信号的下降沿(即从隐性开始放电
)会很缓慢,CAN信号会读到错误位,信号出现位错误于是报错,信号停止发送。
2.当端接电阻选择(过大)的时候(或者节点较多,寄生电阻较大,速率较大),下降沿也会收到
影响,情况和上述一致。当端接电阻过小,Vdiff值过小,也会信号报错。
3.信号线没有进行双绞,在信号线短没问题,一旦信号线变长或者环境干扰较大,信号会报错。
4.信号产生振铃过冲较大,信号读值错误。一般是在末端没有添加端接120欧姆电阻
5.CANH,CANL对电源对地的短路。
以上就是对CAN从CAN的定义,CAN的标准,CAN芯片的内部构成原理,CAN的电平范围,CAN的数据帧,CAN硬件常见错误等角度来对CAN硬件设计方面的介绍。
 0
0







