
摘要:SLAM(Simultaneous Localization and Mapping)技术,即同时定位与地图构建,是机器人和无人驾驶领域的核心技术之一。本文将详细介绍SLAM的工作原理,以及在不同领域的应用场景,并对SLAM技术的发展趋势进行展望。
关键词:SLAM;机器人;无人驾驶;定位;地图构建
一、引言
随着人工智能和机器人技术的飞速发展,SLAM技术作为其中的关键组成部分,日益受到人们的关注。SLAM技术使机器人能够在未知环境中自主导航、建图,并实现精确定位,为机器人和无人驾驶车辆的自主化、智能化提供了强有力的支持。
二、SLAM技术原理
1.SLAM技术概述
SLAM 是Simultaneous Localization and Mapping 的缩写,中文译作”同时定位与地图构建”,于1986年首次被提出。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动状态。
首先,作为自动驾驶车辆或自主移动机器人领域的热门技术,SLAM要解决的问题有两个:定位—我在什么地方?,建图—周围环境是什么样子?
用于定位与感知周围环境的方法有很多,例如:室内的仓储物流AGV在地板上铺设导引线或粘贴识别二维码,室外的汽车安装有GPS位置接收器。有了这些东西,定位问题是否都解决了呢?安装于环境中的设备与标识必须严格由人工布置,在一定程度上限值了机器人的使用范围,而GPS信号在高楼、隧道内信号误差变大。这时,SLAM就应运而生了。
2.SLAM核心算法
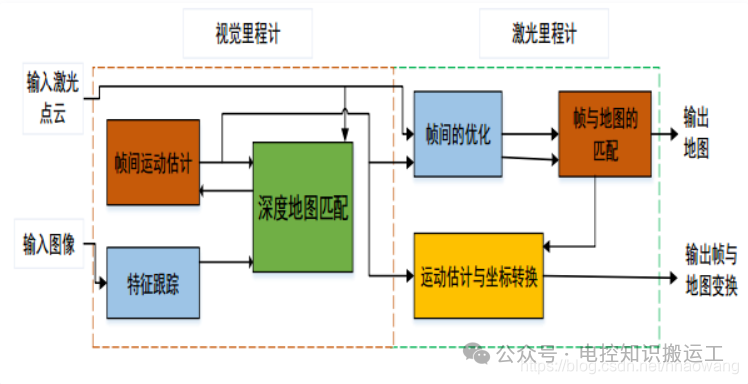
视觉SLAM与激光SLAM
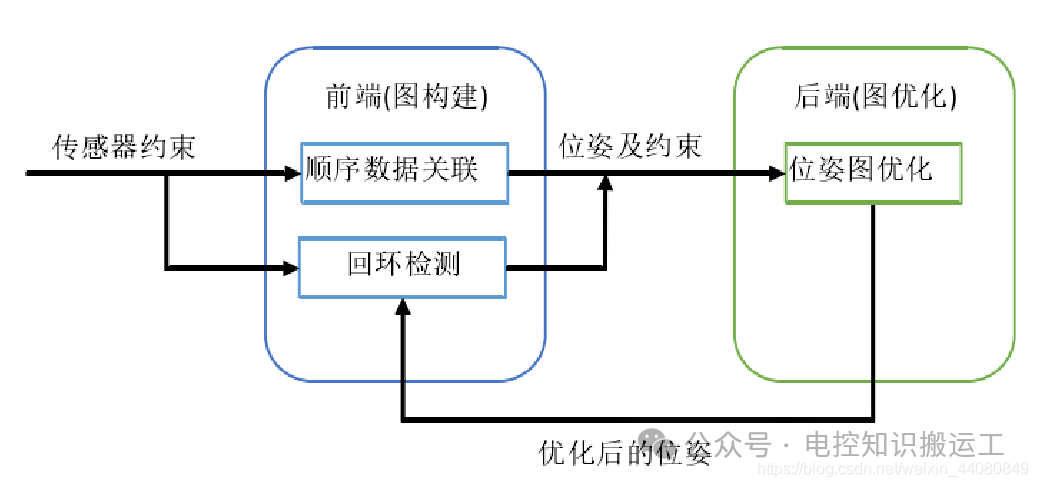
前端传感器数据处理
后端优化算法
回环检测与地图优化
3.SLAM的传感器选择
相机(单目、双目、RGB-D)
激光雷达
IMU(惯性测量单元)
多传感器融合技术
三、SLAM技术的主要类型
1.特征点法SLAM
2.直接法SLAM
3.半直接法SLAM
4.平面SLAM
5.语义SLAM
四、SLAM技术的应用场景
1.机器人领域
家用服务机器人
工业机器人
无人驾驶清洁机器人
2.无人驾驶车辆
自动驾驶汽车
无人机
无人船
3.增强现实与虚拟现实
AR/VR导航与交互
三维重建与场景模拟
4.智能监控与安防
智能监控系统
无人巡检
5.其他领域
救援机器人
农业自动化
空间探索
五、SLAM技术的挑战与未来趋势
1.面临的挑战
复杂环境下的鲁棒性问题
实时性与准确性之间的平衡
大规模环境的地图构建与存储
2.未来发展趋势
深度学习在SLAM中的应用
多传感器融合与多模态数据处理
语义地图与智能交互
云端SLAM与边缘计算
六、结论
SLAM技术作为机器人和无人驾驶领域的核心技术,其发展和应用前景广阔。随着技术的不断进步和创新,SLAM将在更多领域发挥重要作用,推动智能化、自主化技术的快速发展。
 0
0







