智能化红外线自动水龙头控制电路设计与实现
电路一点通
218浏览
0评论
0点赞
2023-11-29
原理框图
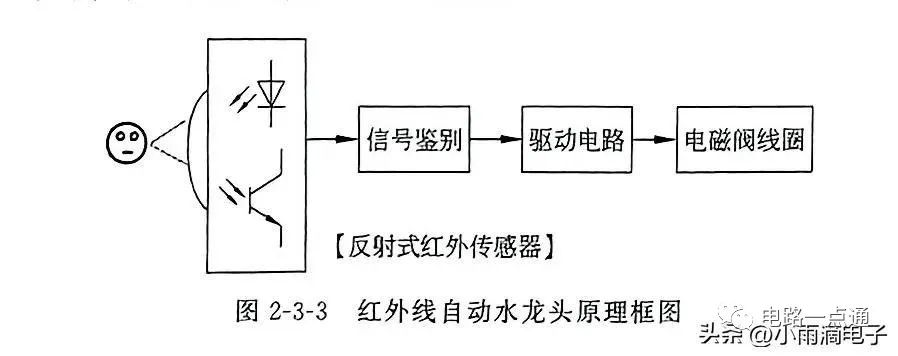
各单元电路作用如下(1)反射式红外线传感器。它是将红外发射二极管和接收三极管两个元件放在同一个封装体内,通过窗口向外发射和接收。在正向电流作用下,红外线二极管发出红外线,当有物体靠近传感器窗口时,由于物体的反射作用将红外线反射到接收管,从而使其内部的电流产生变化,生成控制信号。采用红外线发射和接收的方式可以抗日光、灯光的干扰。(2)信号鉴别电路。鉴别的目的是防止可能存在的其他红外信号的干扰,防止电磁阀产生误动作,提高电路工作的靠性。(3)驱动电路。在水龙头的管路上安装一个电磁阀,用于控制水流。电磁阀内部有电磁线圈,静铁心,动铁心和动铁心复位弹簧。当电磁阀线圈通电时,动铁心被提起,水龙头开启,反之则关闭。驱动电路是用来为电磁阀的线圈提供电流。
元器件
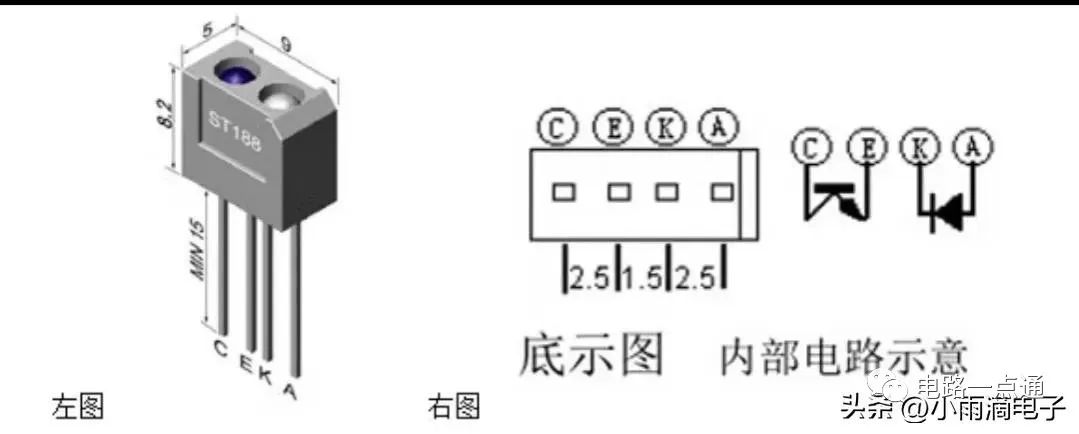
红外传感器st188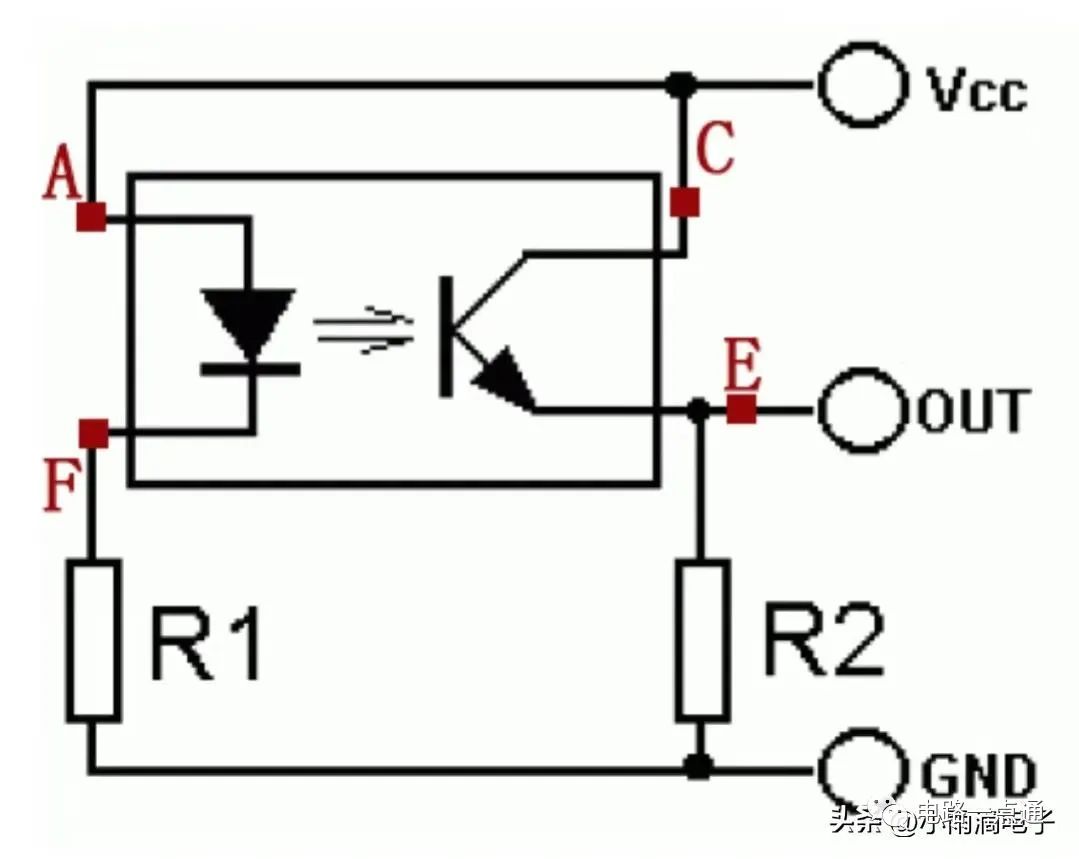
当红外线发射二极管有正向电流通过,向外发出红外光束时,如果有物体靠近
LG 的窗口,红外线将被反射到三极管内部的 PN
结上,产生较大的基极电流,使三极管由截止状态变为饱和状态,其集电极电平由高变低。“正向电流”和“物体靠近”这两个条件必须同时满足,传感器才会产生输出响应。锁相环音频译码器 LM567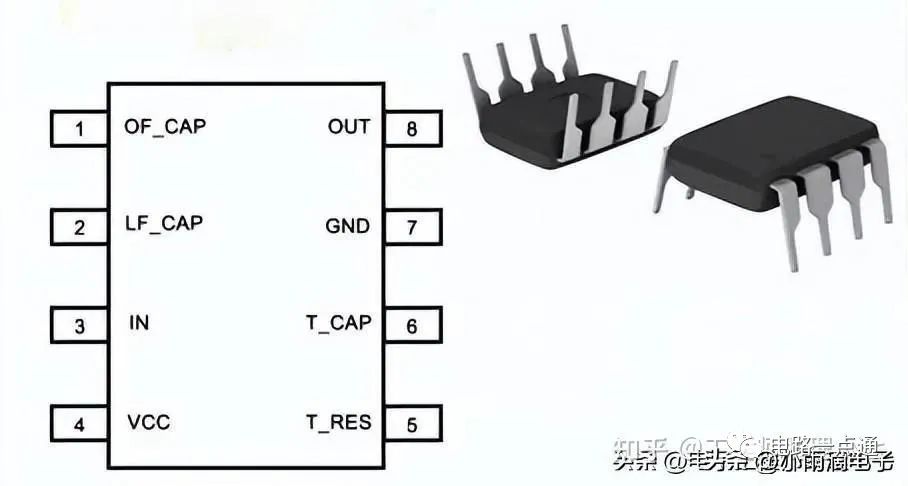
LM567
是一种模拟电路和数字电路组合器件,3 脚为输人端,要求输人交变信号,8
脚为输出端,输出开关量信号,低电平有效。在电路内部有一个矩形波发生器,矩形波的频率由5,6 脚外接的 RC
的参数决定。这个矩形波有两个作用,一是作为内部参考电压,等待与外部输人电压进行比较;二是可提供外部输出。内部工作过程是:输人信号从 3 脚进人LM567 后,与内部的矩形波进行比较,若两者相位一致,则 8脚输出低电平,否则保持离电平。
电路原理图
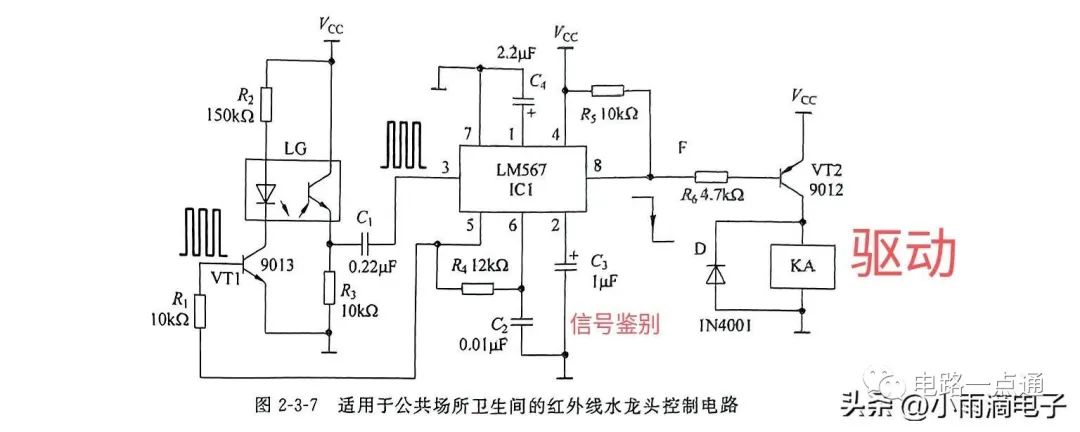
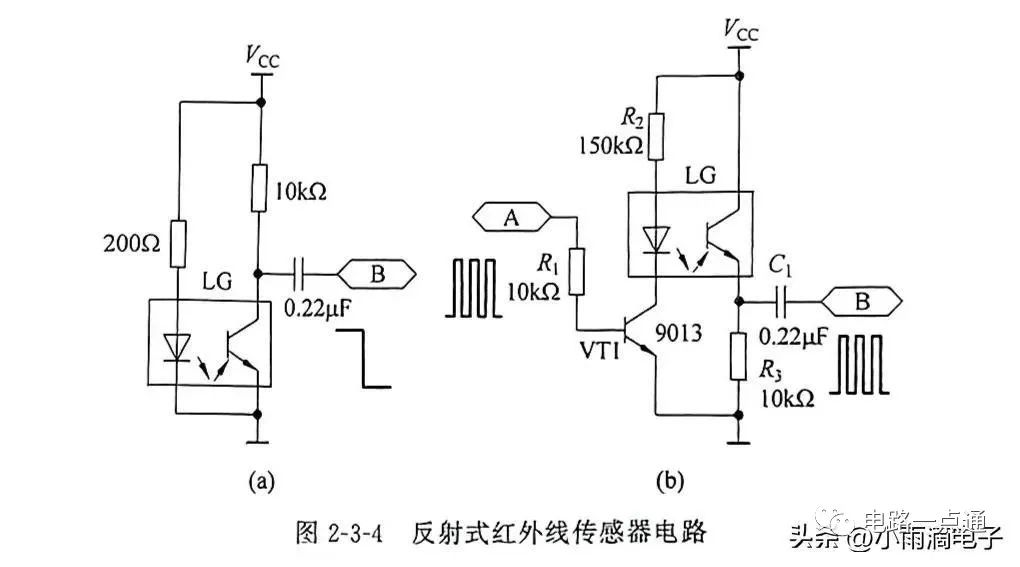
将 LM567 内部产生的矩形波(幅值约 4V)从第 5 脚引出通过 R1送到三极管 VT1 的基极,使接在 VT1 发射极的红外线发射二极管导通并向周围空间发射经调制的红外光。当有人洗手时,接近水龙头的手就将红外光反射回一部分,被红外接收管接收并转换为相应的交变电压信号,这个信号和
LM567 输出(5脚)的信号变化规律是一致的,经 C1耦合又回到 LM567 的输入端(3
脚)上,与内部矩形电压信号进行相位比较,两者几乎丝毫不差,此时 LM567 的输出端(8 脚)由高电平变为低电平。需要注意的是,8
脚是集电极开路输出,使用时必须外加上拉电阻(R5)。
声明: 本文转载自其它媒体或授权刊载,目的在于信息传递,并不代表本站赞同其观点和对其真实性负责,如有新闻稿件和图片作品的内容、版权以及其它问题的,请联系我们及时删除。(联系我们,邮箱:evan.li@aspencore.com )
-
本次2025全球 MCU及嵌入式技术论坛,旨在汇聚行业精英,共同探讨MCU的最新技术、市场趋势和应用前景,为参会者提供全面而深入的行业洞察。国际电机驱动与控制技术论坛将聚焦于展示和探讨电机驱动与控制技术的最新进展及其在多个领域的应用,汇集全球知名企业和专家学者,为电机行业的未来发展提供宝贵的见解和方向。同期举行:国际AI+IoT生态发展高峰论坛,暨2025年度AIoT创新奖颁奖典礼。立即报名>>>
-
电感器是由电线线圈组成的设备,包裹在磁性材料上...
-
滤波器的使用,使得特定频率的信号能够被过滤掉。在上篇滤波器文章中,小编对滤波器的主要参数有所阐述。为增进大家对滤波器的认识,本文将对滤波器的主要分类,以及滤波器的使用注意事项予以介绍。如果你对滤波器...
-
ups电源是生活中的常用电源类型之一,对于ups电源,很多朋友其实都有所了解。为增进大家对ups电源的认识,本文将基于两点介绍ups电源:1.ups电源使用注意事项,2.ups电源维修技巧。如果你对ups电源具有兴趣,不妨继...
-
光耦,也就是光耦合器,在电路中应用广泛。上篇文章中,小编介绍了光耦的技术参数,但这只是理论部分。如果想要掌握光耦的应用,还需自己动手尝试。为增进大家对光耦的认识,本文将介绍光耦的实用技巧。如果你对光...
-
逆变器无疑是工业应用中常用的转换器之一了,对于逆变器,我们或多或少具备一定的了解。为增进大家对逆变器的了解,本文将对影响逆变器寿命的因素予以介绍。如果你对逆变器相关内容具有兴趣,不妨同小编一起继续往...
-
信息时代的到来极大地改变了人类社会的生产、生活、工作和学习方式。射频功率放大器不仅在通讯系统中得到广泛应用,还逐渐被应用于其他领域内。本文为一种新型射频导热治疗仪所设计的大功率射频放大器电路,满足工...
-
DHT11为 4 针单排引脚封装,如下图,采用单线制串行接口,只需加适当的上拉电阻,信号传输距离可达20米以上,使其成为各类应用甚至最为苛刻的应用场合的最佳选则。 二.传感器参数 1.DHT11电气参数如下: 型号 测量...
-
压力变送器作为测量仪器,是工业中最常用的传感器之一。上篇文章中,小编对压力变送器的种类有所阐述。为增进大家对压力变送器的认识,本文将对绝对压力变送器、绝对压力变送器的原理以及选型予以介绍。如果你对压...
-
继电器,虽是老生常谈的话题,但是却耐人寻味。本文中,小编将对继电器、继电器的主要作用予以阐述。此外,小编还将介绍高频继电器的工作原理、高频继电器的特点和高频继电器的结构。如果你对继电器具有兴趣,不妨...
-
CMOS在电路中具有重要作用,大家对于CMOS通常较为耳熟。但是,大家对于CMOS却未必十分了解。为增进大家对CMOS的认识,本文将对CMOS相关知识予以详细介绍。如果你对本文内容具有兴趣,不妨继续往下阅读哦。 CMOS(Co...
-
-

 0
0







