Linux信号处理机制(一)——什么是信号引入?
信号在最早的Unix系统中被引入,内核可用信号通知进程系统所发生的事件。在现实生活中,我们每天都在接触信号,下课铃声、红绿灯、闹钟等都是信号。
信号的本质
操作系统给进程发送信号,本质上是给进程的PCB中写入数据,修改相应的PCB字段,进程在合适的时间去处理所接受的信号。我们模拟一下这样的场景:(1)用户输入一个命令,在shell下启动一个前台进程;(2)用户按下Ctrl c,通过键盘输入产生一个硬件中断;(3)如果CPU当前正在运行此进程的代码,则该进程的用户空间的代码将暂停执行,CPU从用户态切换至内核态处理中断;(4)终端驱动程序将Ctrl c解释为一个SIGINT信号,记在该进程的PCB中;(5)当某个时刻从内核返回至该进程的用户空间代码继续执行之前,首先处理PCB中记录的信号;SIGINT信号的默认处理动作为终止信号,所以直接终止进程而不再返回到它的用户空间代码;注:Ctrl c所产生的信号只能发送给前台进程,如果想让该进程在后台运行,需要在启动该进程的时候,在后面加上&,这样shell就不必等待进程结束就可以接受新的命令,启动新的进程。
上图中,S为后台进程,S 为前台进程;shell可以同时运行一个前台进程和任意多个后台进程,只有前台进程才能接受诸如Ctrl c这样的信号,前台进程在运行过程中用户随时按下Ctrl c而产生一个信号,也就是说该进程的用户空间代码执行到任何地方都有可能接收到一个SIGINT信号而被终止,因此信号相对于进程的控制流程来说是异步的。
普通信号与实时信号
我们使用 kill -l 命令可以查看系统定义的信号列表,每个编号都有一个宏与之对应,可以在 /usr/include/asm/signal.h 中查看,下图中 1~31号为普通信号,34~36号信号为实时信号。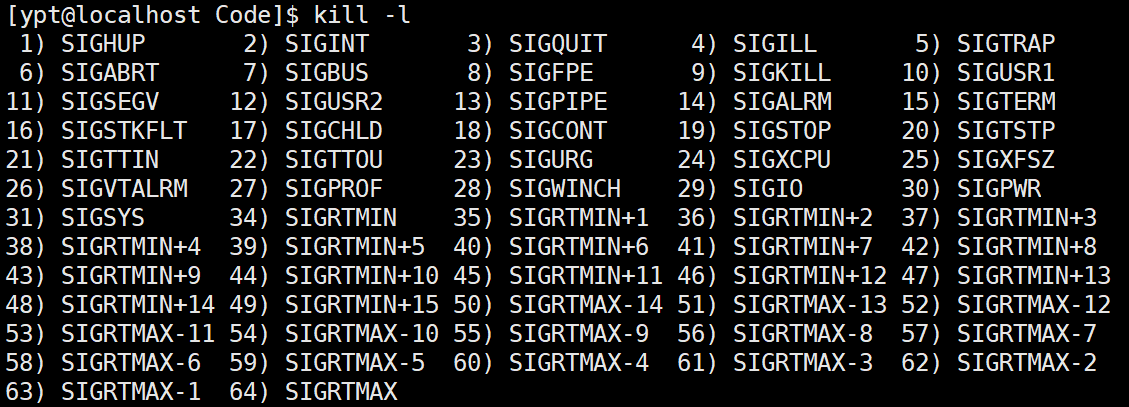
那么使用上述信号的目的是什么呢?大致可以总结为两点。(1)让进程知道已经发生了一个特定的事件;(2)强迫进程执行它代码中的信号处理程序;上述的两个目的不是互斥的,因为进程经常通过执行一个特定的例程来对某一个事件做出反应。实时信号(real-time signal):编号为34~46,它们通常与普通信号有很大的不同,因为他们必须排序以便发送多个信号能被接收到。但是同种信号的普通信号并不排序,尽管在Linux内核并不使用实时信号,它还是通过几个特定的系统调用完全实现了POSIX标准。 信号有很多,常见的有:
-
SIGINT:在键盘按下组合键后产生,默认动作为终止进程;
-
SIGQUIT:在键盘按下组合键后产生,默认动作为终止进程;
-
SIGKILL:无条件终止进程。本信号不能被忽略、处理和阻塞。默认动作为终止进程。它向系统管理员提供了一种可以杀死任何进程的方法;
-
SIGALRM:定时器超时,超时的时间由系统调用alarm设置。默认动作为终止进程;
-
SIGCHLD:子进程结束时,父进程会收到这个信号。默认动作为忽略该信号;
信号的存储
内核给一个进程发送软中断信号的方法,是在进程所在的进程表项的信号域设置对应于该信号的位,而存储这32位信号的空间恰巧需要4个字节,因此采用位图存储是最好不过的。bit位的位置表示对应信号的编号,用0来表示未接受到信号,1表示接收到信号。
产生信号的主要条件
(1)用户在终端按下某些键时,终端驱动会发送信号给前台进程,例如Ctrl c产生的SIGINT信号、Ctrl 产生SIGQUIT信号、Ctrl z产生SIGSTOP信号;(2)硬件异常产生的信号,这些条件由硬件检测并通知内核,然后内核向当前进程发送合适的信号。比如当前进程访问了非法地址,MMU(内存管理单元)会产生异常,内核将这个异常解释为SIGSEGV信号发送给进程;(3)一个进程调用 kill 函数可以发送信号给另一个进程,也可以调用 kill 命令发送信号给某一个进程,kill 命令也是调用 kill 函数实现的,如果不明确指定信号,则发送SIGTERM信号,该信号的默认处理动作是终止进程,当内核检测到软件条件发生时可以通过信号通知进程。
如何处理信号
进程以三种方式对一个信号做出应答:
(1)显示的忽略信号;(2)执行与信号相关的默认操作;由内核预定义的默认操作取决于信号的类型,可以是以下类型之一:Treminate:进程被终止(杀死)Dump:进程被终止(杀死),如果可能,创建包含进程执行上下文的核心转储文件Ignore:信号被忽略Stop:进程被停止,即把进程置为TASK_STOPPED状态Continue:如果进程被停止,就把它设置为TASK_RUNNING状态
(3)通过调用相应的信号处理函数捕捉信号(自定义类型)信号捕捉函数:可以修改信号的默认处理操作,但某些信号是不能够被捕捉的,比如9号信号,它存在的目的是防止恶意进程入侵而无法被终止,在一定程度上保护了操作系统。
#include
typedef void (*sighandler_t)(int);
sighandler_t signal(int signum, sighandler_t handler);
参数signum:信号的编号参数handler:是一个函数指针,表示接受此信号要执行的函数的地址返回值:若成功则为指向前次处理程序的指针,若出错则为SIG_ERR我们做一个测试,对2号信号进行捕捉:#include
#include
void handler()
{
printf("handler
");
}
int main()
{
signal(2,handler);
while(1);
return 0;
}
 我们可以看到Ctrl c是不能终止该程序的,无奈我们只能用9号信号来杀死该进程。修改上面的程序:#include
#include
#include
typedef void(*sighandler_t) (int);//函数指针
sighandler_t _handler = NULL;
void handler()
{
printf("handler
");
signal(2,_handler);//恢复默认处理
}
int main()
{
_handler = signal(2,handler);//捕捉2号信号
while(1);
return 0;
}
我们可以看到Ctrl c是不能终止该程序的,无奈我们只能用9号信号来杀死该进程。修改上面的程序:#include
#include
#include
typedef void(*sighandler_t) (int);//函数指针
sighandler_t _handler = NULL;
void handler()
{
printf("handler
");
signal(2,_handler);//恢复默认处理
}
int main()
{
_handler = signal(2,handler);//捕捉2号信号
while(1);
return 0;
}
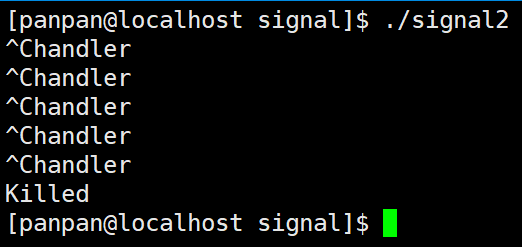
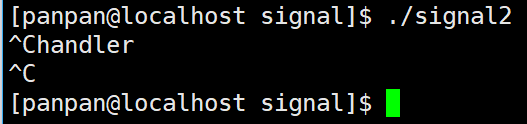 对上述程序的解释:首先我们用Ctrl c捕捉2号信号,并用_handler函数指针对象接受,在handler函数内,再次用 Ctrl c 捕捉2号信号,并指向_handler捕捉成功,返回之前的信号处理函数,即恢复了默认处理,程序得以终止。
对上述程序的解释:首先我们用Ctrl c捕捉2号信号,并用_handler函数指针对象接受,在handler函数内,再次用 Ctrl c 捕捉2号信号,并指向_handler捕捉成功,返回之前的信号处理函数,即恢复了默认处理,程序得以终止。
信号产生的方法
(1)通过终端按键产生信号(Core dump)
(2)调用系统函数向进程发送信号首先在后台执行死循环程序,然后用 kill 命令给它发一个 SIGSEGV 信号。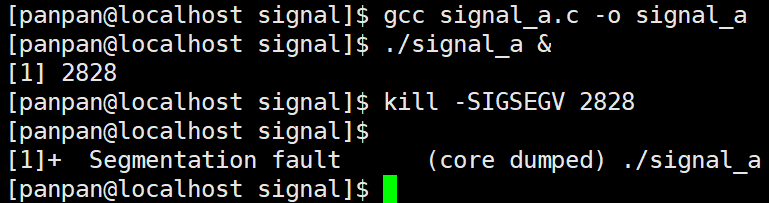 我们将signal_a程序在后台运行,之所以要按一次回车键才显示段错误的原因在于,该进程终止之前已经回到了shell提示符等待用户输入下一条命令,shell不希望段错误的信息和用户输入的交错在一起,所以等用户输入命令之后才会显示。
我们将signal_a程序在后台运行,之所以要按一次回车键才显示段错误的原因在于,该进程终止之前已经回到了shell提示符等待用户输入下一条命令,shell不希望段错误的信息和用户输入的交错在一起,所以等用户输入命令之后才会显示。
kill命令是调用 kill 函数实现的, kill 函数可以给一个特定的进程发送指定的信号;raise函数可以给当前进程发送指定的信号(自己也可以给自己发送信号),原型如下:#include
int kill(pid_t pid, int signum); //给任意进程发送任意信号
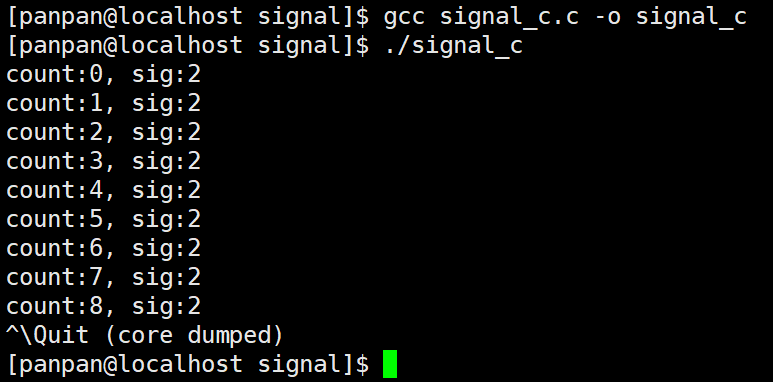
int raise(int signo); //给自己发送任意信号参数pid:进程号参数signum:信号的编号返回值:两者都是成功返回0,失败返回-1我们模拟一下raise函数,给自己发送2号信号:#include
#include
int count = 0;
void myhandler(int sig)
{
printf("count:%d, sig:%d
",count ,sig);
}
int main()
{
signal(2,myhandler);
while(1)
{
raise(2);
sleep(1);
}
return 0;
}
运行结果如下:
abort可以使当前进程接收到信号而异常终止,但是abort会认为进程不安全。#include
void abort(void);类似于exit函数一样,abort函数总是成功的,因此没有返回值。(3)由软件条件产生信号进程可以通过调用alarm向它自己发送SIGALRM信号,函数原型如下:#include
unsigned int alarm(unsigned int seconds);
参数seconds:alarm函数安排内核在seconds秒内发送一个SIGALRM信号给调用进程,如果soconds等于0,那么不会调度新的闹钟(alarm)返回值:前一次闹钟剩余的秒数,若以前没有设定闹钟,则为0下面这个程序,我们让SIGALRM信号在5秒内数数,当传送第6个SIGALRM信号的时候程序会终止。#include
#include
#include
#include
void handler(int sig)
{
static int count = 0;
printf("count=%d
",count);
if(count 运行结果如下:
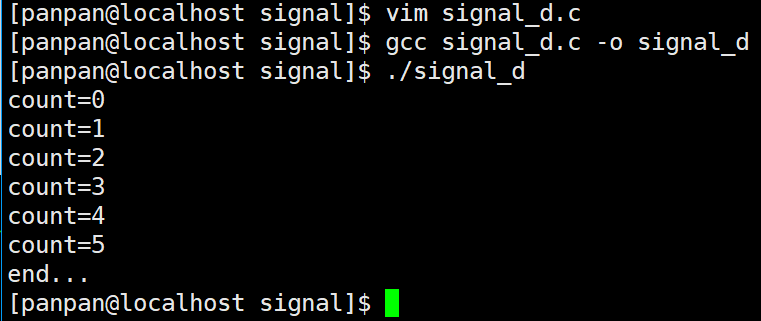 我们使用signal函数设置了一个信号处理函数,只有进程收到一个SIGALRM信号,就异步调用该函数,中断main的while循环,当handler返回时,控制传递回main函数,它就从最初被信号到达时中断了的地方继续执行。
我们使用signal函数设置了一个信号处理函数,只有进程收到一个SIGALRM信号,就异步调用该函数,中断main的while循环,当handler返回时,控制传递回main函数,它就从最初被信号到达时中断了的地方继续执行。
声明: 本文转载自其它媒体或授权刊载,目的在于信息传递,并不代表本站赞同其观点和对其真实性负责,如有新闻稿件和图片作品的内容、版权以及其它问题的,请联系我们及时删除。(联系我们,邮箱:evan.li@aspencore.com )
-
本次2025全球 MCU及嵌入式技术论坛,旨在汇聚行业精英,共同探讨MCU的最新技术、市场趋势和应用前景,为参会者提供全面而深入的行业洞察。国际电机驱动与控制技术论坛将聚焦于展示和探讨电机驱动与控制技术的最新进展及其在多个领域的应用,汇集全球知名企业和专家学者,为电机行业的未来发展提供宝贵的见解和方向。同期举行:国际AI+IoT生态发展高峰论坛,暨2025年度AIoT创新奖颁奖典礼。立即报名>>>
-
MCU,对于普通人而言,是一个高大上的存在。但是,在工业中,MCU确实常见产品。为增进大家对MCU的认识,本文将基于两点介绍MCU:1.8位MCU和32位MCU如何选择?2.如何选择合适的MCU。如果你对MCU具有兴趣,不妨继续往...
-
1.1ARM-Advanced RISC Machines ARM(Advanced RISC Machines),既可以认为是一个公司的名字,也可以认为是对一类微处理器的通称,还可以认为是一种技术的名字。 1991年ARM公司成立于英国剑桥,主要出售芯片设计技术...
-
简介:常看见初学者要求使用_at_,这是一种谬误,把C当作ASM看待了。在C中变量的定位是编译器的事情,初学者只要定义变量和变量的作 用域,编译器就把一个固定地址给这个变量。怎么取得这个变量的地址?要用指针。 1) C...
-
简介:51单片机几个精确延时程序:在精确延时的计算当中,最容易让人忽略的是计算循环外的那部分延时,在对时间要求不高的场合,这部分对程序不会造成影响. 一. 500ms延时子程序(晶振12MHz,一个机器周期1us.) 程...
-
简介:在提高硬件系统抗干扰能力的同时,软件抗干扰以其设计灵活、节省硬件资源、可靠性好越来越受到重视。下面以MCS-51单片机系统为例,对微机系统软件抗干扰方法进行研究。 1、软件抗干扰方法的研究 在工程实践中...
-
引言 随着人们生活水平的提高,对汽车座椅的舒适性要求也越来越高,要求对汽车座椅地调节能够更加简单、方便、快捷。目前,汽车座椅位置的调节多采用基于手动调节方式的机械和电动控制两种方式。汽车座椅位置的调节...
-
用C语言进行MCS51系列单片机程序设计是单片机开发和应用的必然趋势。Keil公司的C51编译器支持经典8051和8051派生产品的版本,通称为Cx51。应该说,Cx51是C语言在MCS51单片机上的扩展,既有C语言的共性,又有它自己...
-
TMOD : 控制定时器的工作方式。8个bit,高四位 bit 控制 T1,、低四位 bit 控制 T0。因为定时器有4种工作方式;TMOD = 0x00(工作方式0),TMOD = 0x01(工作方式0),TMOD = 0x02(工作方式2),TMOD = 0x03(工作方式3)。...
-
学习单片机有一学期了,现在也由51转到STM32了。一直想对51的学习做一个总结。也希望对别人有一些启发。也给后学者提供一些建议。当然本文是我对自己学习过程的总结,若有不对的地方,还请高手指出。 我想,再看本...
-
功能要求: 一):绿灯25s倒计时,绿灯过度红灯有5s黄灯时间,红灯25s后直接跳绿灯。 二):按键按下模拟闯红灯输入,产生5s蜂鸣器鸣叫。 开发环境: 软件:Keil uVision4 硬件:HOT51增强型单片机开发板 程序代码:...
-
延时程序在单片机编程中使用非常广泛,但一些读者在学习中不知道延时程序怎么编程,不知道机器周期和指令周期的区别,不知道延时程序指令的用法, ,本文就此问题从延时程序的基本概念、机器周期和指令周期的区别和联系...
-
Flash是大家常使用的存储之一,对于Flash,大家或多或少有所了解。上篇文章中,小编对Flash闪存的类型有所介绍。为继续增进大家对Flash的认识,本文将对Flash盘、Flash盘结构以及Flash读写操作予以介绍。如果你对本...

 0
0







