(一)简介
- 四根通信线:SCK、MOSI、MISO、SS(片选信号)
- 同步(同步通信是一种通信模式,在这种模式下,发送方和接收方在同一时刻进行数据传输。),全双工
- 支持总线挂载多设备(仅一主多从),会有多根SS线
限制通讯速度100、400KHz
相对于I2C,SPI的优缺点:
①SPI协议并没有严格规定最大传输速度,其取决于芯片厂商需求。
②全双工,SPI硬件开销大,通讯过程中经常会有资源库浪费现象。

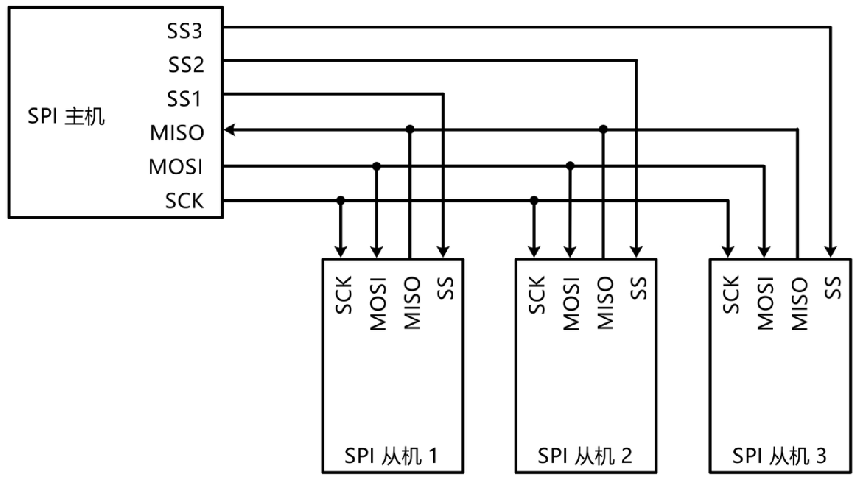
(二)硬件电路
- 所有SPI设备的SCK、MOSI、MISO分别连在一起
- SCK:时钟线完全由主机掌控
- MOSI:主机输出,从机输入
- MISO:主机输入,从机输出
- 主机另外引出多条SS控制线,分别接到各从机的SS引脚
- 输出引脚配置为推挽输出,输入引脚配置为浮空或上拉输入
SPI的输入输出引脚是固定的,基本不会出现冲突,因此可以使用推挽输出。但SPI仍有可能在MISO线上多个从机推挽输出造成冲突,因此SPI规定从机未被选中时候的MISO引脚必须为高阻态
(三)移位示意图
移位寄存器随着SCK的频率触发移位,会将箭头方向移出去的一位放到引脚上。在SCK频率触发的间隔,主机和从机都进行数据采集,获取移除位所在的引脚的电平存放到各自箭头方向连接的寄存器上。
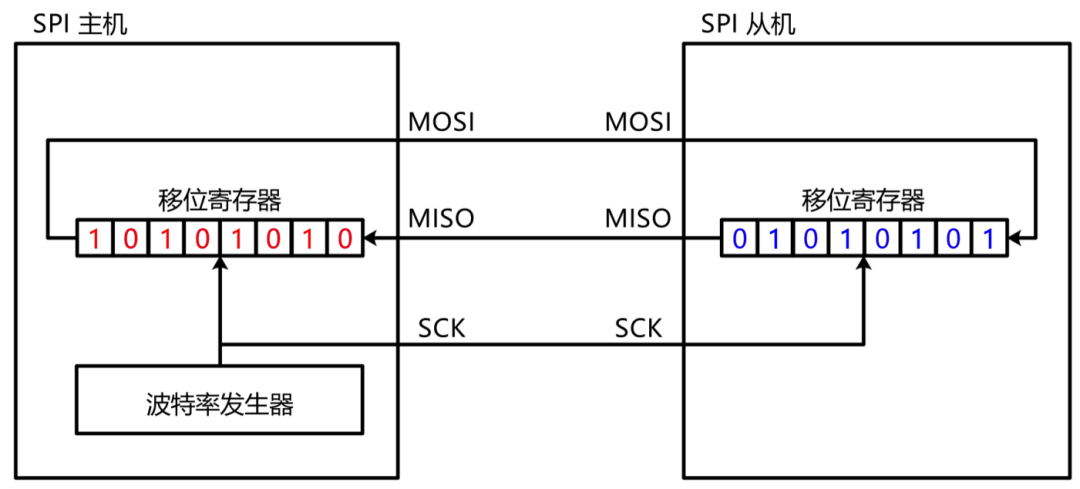
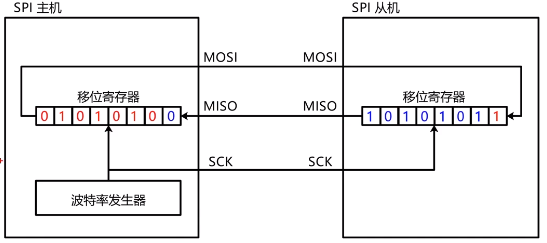
多次后就完成了一个字节的数据交换。只收或只发的情况下,只需要忽略掉发送或者接收信号即可。
(四)SPI时序基本单元
- 起始条件:SS从高电平切换到低电平
- 终止条件:SS从低电平切换到高电平
 如果CPOL被清'0',SCK引脚在空闲状态保持低电平;如果CPOL被置'1',SCK引脚在空闲状态保持高电平。如果CPHA(时钟相位)位被置'1',SCK时钟的第二个边沿(CPOL位为0时就是下降沿,CPOL位为'1'时就是上升沿)进行数据位的采样,数据在第二个时钟边沿被锁存。如果CPHA位被清'0',SCK时钟的第一边沿(CPOL位为'0'时就是上升沿,CPOL位为'1'时就是下降沿)进行数据位采样,数据在第一个时钟边沿被锁存。
如果CPOL被清'0',SCK引脚在空闲状态保持低电平;如果CPOL被置'1',SCK引脚在空闲状态保持高电平。如果CPHA(时钟相位)位被置'1',SCK时钟的第二个边沿(CPOL位为0时就是下降沿,CPOL位为'1'时就是上升沿)进行数据位的采样,数据在第二个时钟边沿被锁存。如果CPHA位被清'0',SCK时钟的第一边沿(CPOL位为'0'时就是上升沿,CPOL位为'1'时就是下降沿)进行数据位采样,数据在第一个时钟边沿被锁存。
【交换一个字节(模式0)】
- (时钟极性)CPOL=0:空闲状态时,SCK为低电平
- (时钟相位)CPHA=0:SCK第一个下降沿移入数据,第二个下降沿移出数据
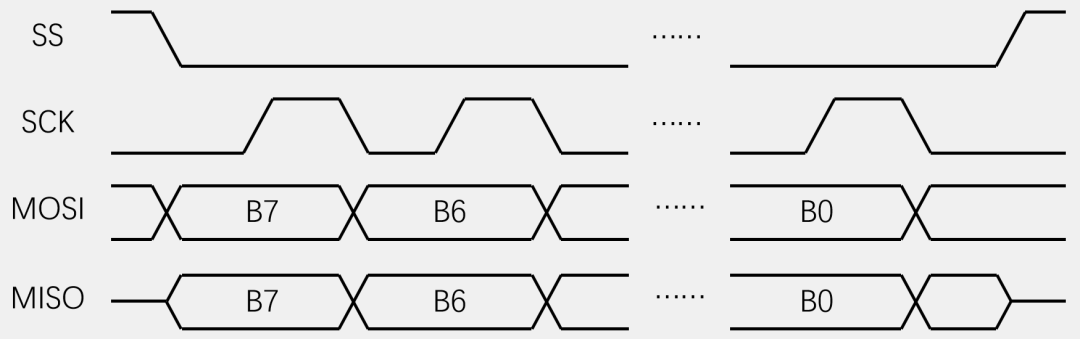 MISO不发送数据时候为高阻态(中间线),只要SS不置高,可以一致重复交换数据。
MISO不发送数据时候为高阻态(中间线),只要SS不置高,可以一致重复交换数据。
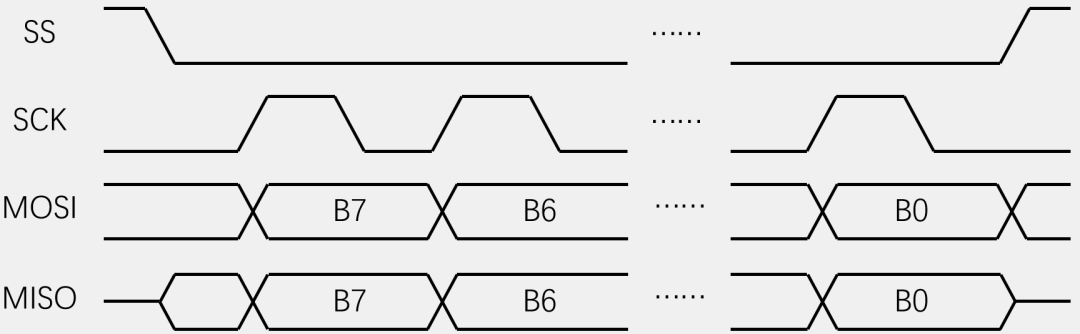
【交换一个字节(模式1)】(常用、高速)
- CPOL=0:空闲状态时,SCK为低电平
- CPHA=1:SCK第一个下降沿移出数据,第二个下降沿移入数据
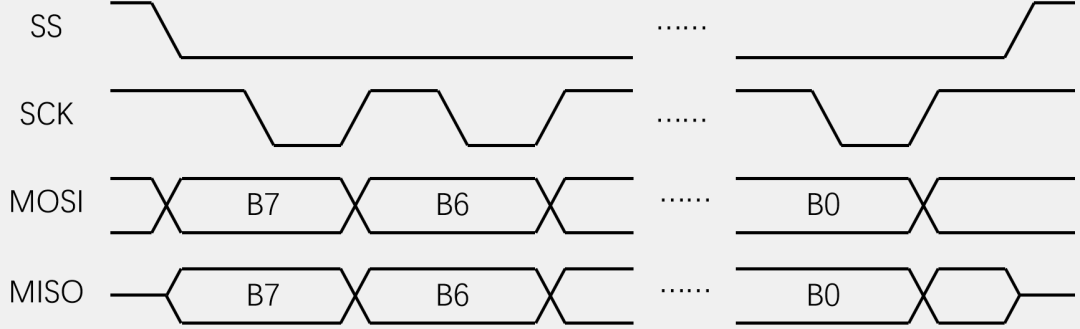
【交换一个字节(模式2)】
- CPOL=1:空闲状态时,SCK为高电平
- CPHA=0:SCK第一个上升沿移入数据,第二个上升沿移出数据
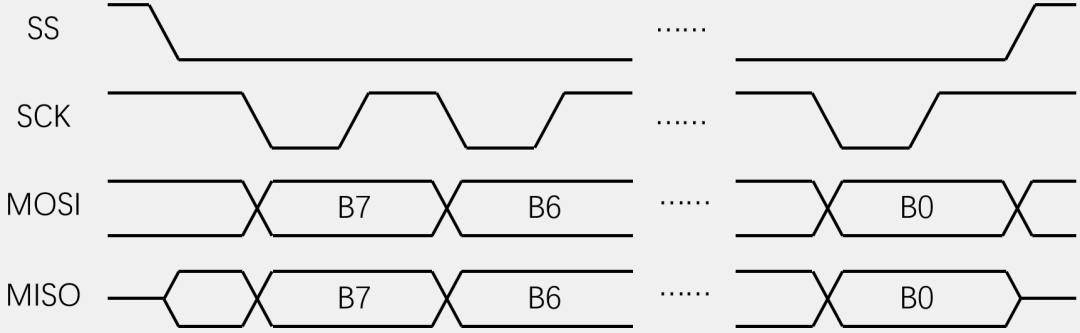
【交换一个字节(模式3)】
- CPOL=1:空闲状态时,SCK为高电平
- CPHA=1:SCK第一个上升沿移出数据,第二个上升沿移入数据
(五)SPI配置代码
1.初始化
SPI_InitTypeDef SPI_InitStructure;SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //双线双向全双工SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //主 SPISPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; // SPI 发送接收 8 位帧结构SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;//串行同步时钟的空闲状态为高电平SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;//第二个跳变沿数据被采样SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS 信号由软件控制SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //预分频 256SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //数据传输从 MSB 位开始SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC 值计算的多项式SPI_Init(SPI2, &SPI_InitStructure); //根据指定的参数初始化外设 SPIx 寄存器
2.使能SPI
SPI_Cmd(SPI2, ENABLE); //使能 SPI 外设SPI2_ReadWriteByte(0xff); //启动传输,主机发一个字节,进行一次传输,可以启动传输
3.SPI传输数据
//发送数据函数 void SPI_I2S_SendData(SPI_TypeDef* SPIx, uint16_t Data); //接收数据函数 uint16_t SPI_I2S_ReceiveData(SPI_TypeDef* SPIx);
4.查看 SPI 传输状态函数
判断数据是否传输完成,发送区是否为空
SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE);
判断接收是否完成,接收区是否空
SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE)
 0
0