
随着汽车智能化,网联化的渗透与普及,汽车电子电气零部件占汽车的比重也逐渐提高。高级驾驶辅助系统,车载多媒体娱乐系统等逐渐成为消费者关注且左右购买决策的功能配置。越发复杂的系统对传感器、电子控制器(Electronic Control Unit, ECU)的数量有了需求,如自动驾驶的摄像头,毫米波雷达,多媒体娱乐系统的副驾驶娱乐屏幕,HUD 抬头显示系统,控制发动机表现的 ECM 模块、管理新能源汽车电池的 BMS 模块以及用于 360 度环视影像融合计算的 AVM 模块等等。据焉知汽车数据,一辆现代豪华汽车中通常包含了70到100个ECU。
传统的分布式电子电气架构(Electrical/Electronic Architecture, EEA)由于其:
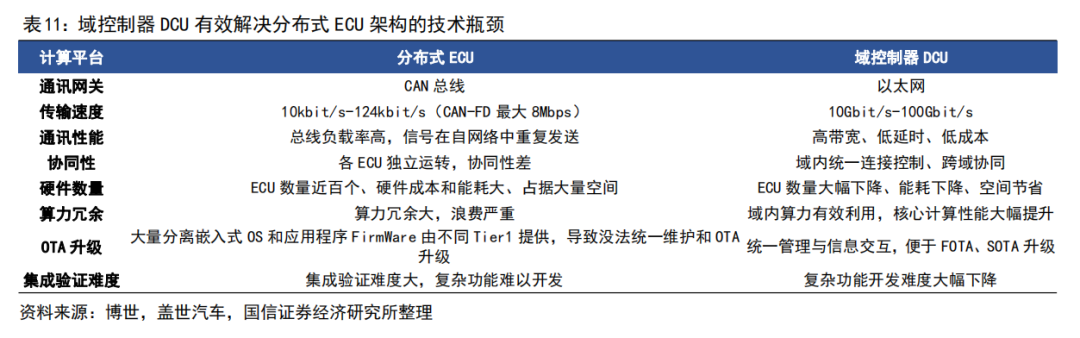
1. 算力分散无法高效利用 ;
2. 线束成本重量劣势;
3. 无法支持高带宽车内通信;
4. 后续升级维护困难等多维度原因,已无法满足发展需求。
集中式电子电气架构应运而生,并且在未来最终会走向中央计算平台的形式。
1、 算力分散无法高效利用。
分布式架构下汽车搭载数十个控制器,且为保证性能稳定性及安全性,每个控制器芯片硬件算力相对其上运行的程序都有所冗余。这就导致从整车维度,各个控制器的能力“各自为政”,无法高效协同。反之在集中式电子电气架构下算力在行车时为辅助驾驶服务,在驻车休息时可为车载游戏提供运行算力。
2、 线束成本及重量劣势。
庞大的 ECU 数量同样意味着复杂、冗长的总线线束。据电子工程世界网数据,一辆高级汽车的线束使用量约 2km,重量在 20~30kg。在线束中,线缆材料本身重量占到线束总重量的 75%左右。集中式的电子电气架构以及域控制器的引入,可极大的缩短线束的使用量。
3、 无法支持高带宽车内通信。
分布式 ECU 时代,计算和控制的核心是 MCU 芯片,传输的基础核心是基于传统的 CAN、LIN 和 FlexRay 等低速总线。随着 ECU的不断增多,导致总线负载增加,基本上达到允许的上限了,这样容易导致信号丢帧、总线堵塞等技术难题,从而导致安全隐患。但在域控制器时代,高性能、高集成度的异构芯片作为域的主控处理器,域内统一调度控制,域外通过以太网等进行高速通信。目前百兆和千兆的以太网已在多款新车型上得到应用。车载以太网每节点实施成本高于 CAN 、 LIN,与 FlexRay 相当。在未来,数据传输速度的制约将使得车载以太网替代传统总线成为必然。
4、 系统集成及 OTA 维护困难。
各个 ECU 开发主要由各 Tier1 提供主机厂,主机厂由内部团队进行集成整合。对主机厂集成开发能力,供应商管理能力提出了很高的挑战。此外,分布式的架构零散的 ECU 布局也难以支持车载软件在线升级(OTA),从而加大了软件后期维护迭代的难度。目前,OTA 已经从部分新势力车企的独门绝技,逐渐大众化,各个车企的更新迭代频率也在快速提升。据国家市场监督管理总局披露的数据,2021 年各大车企报告 OTA 升级 351 次,较 2020 年同期上升了 55%,而涉及到的车辆达到 3424 万辆之巨,更是较 2020 年同期暴增了307%。
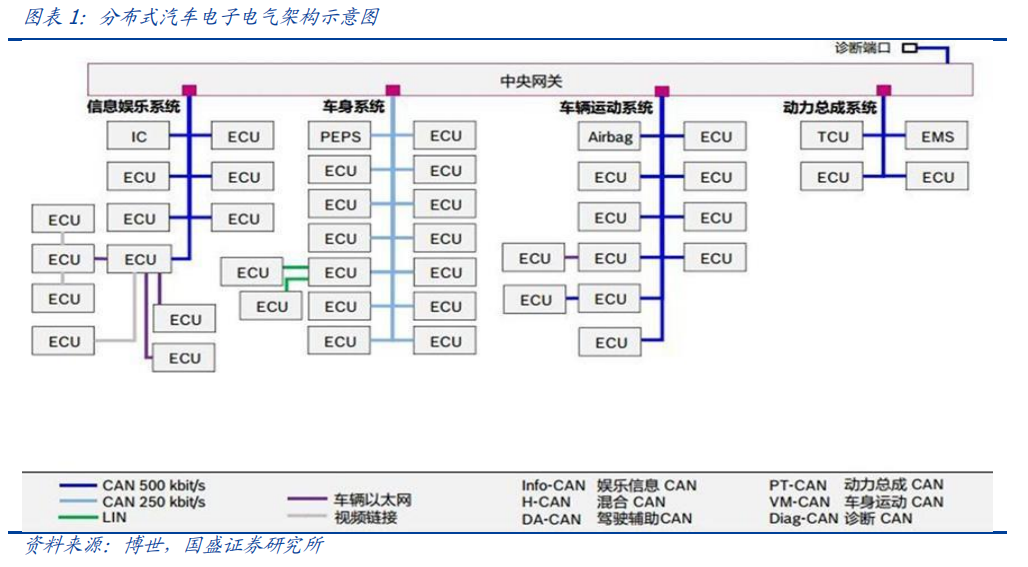
传统汽车的电子电气架构一般采用分布式,其控制中枢由电子控制单元ECU通过CAN总线和LIN总线连接,在传感器、电源及通信芯片、执行器等零部件的配合下,实现对汽车状态与功能的操控。每个控制系统采用单独的 ECU,不同的电控系统功能保持独立性,每增加一个功能就需要增加一个 ECU,因此传统汽车智能功能的增加和升级主要依赖于 ECU 和传感器数量的累加。
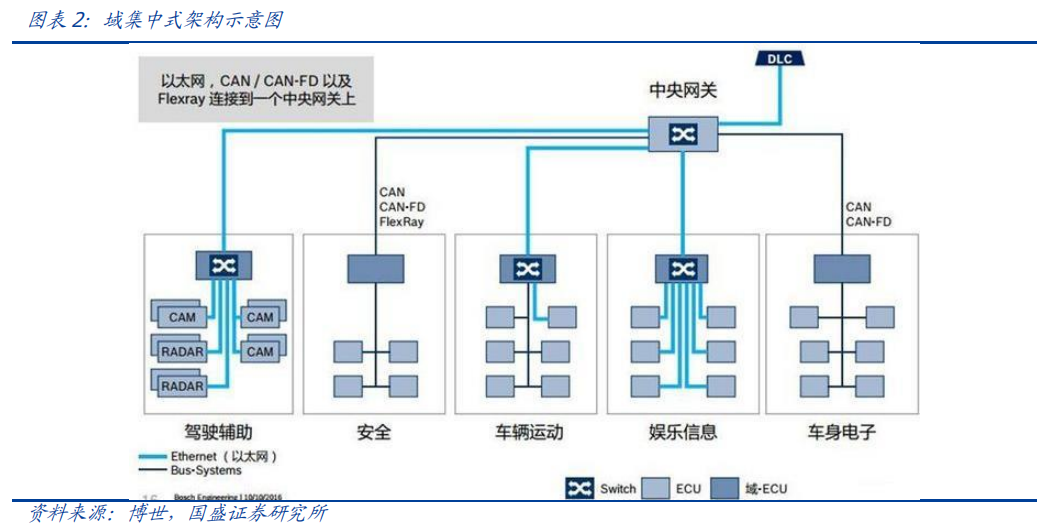
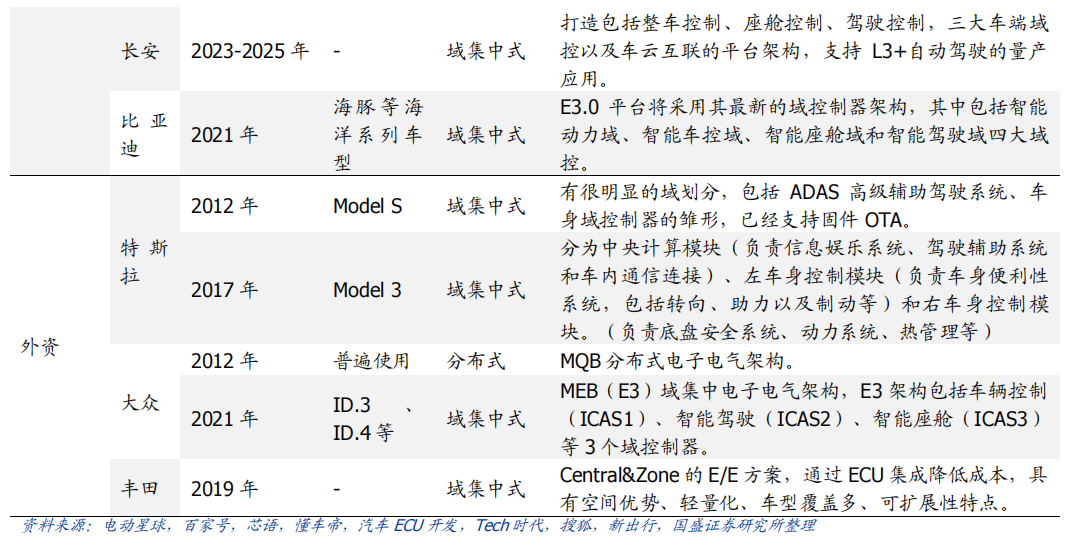
在电子化和智能化发展的需要下,传统的分布式架构逐渐进化为域集中式架构,“域”和“域控制器”产生。域控制器最早由博世、大陆、德尔福等 Tier1厂商提出,通过利用处理能力更强的多核 CPU/GPU 芯片,引入以太网并将分散的 ECU 集成为运算能力更强的域控制器来相对集中地控制每个域,从而解决分布式架构存在的成本、算力等局限性。
域集中式架构的优势主要包括:
1)域集中式架构可以节约成本、降低装配难度。在分布式架构中,随着 ECU 数量增加产生的大量内部通信需求,导致线束成本增加并加大装配难度;而域集中式架构将传感与处理分开,传感器和 ECU 不再一对一,管理更便捷,有效减少了 ECU 和线束的数量,从而降低硬件成本和人工安装成本,同时更有利于部件布局。
2)域集中式架构可以提高通信效率,实现软硬件解耦,便于整车 OTA 升级。分布式架构中,来自不同供应商的 ECU 的软件开发框架和底层代码不同,导致冗余,并提高维护和 OTA 统一升级难度;而域集中式架构做到对各 ECU 进行统一管理与信息交互,统一软件底层开发框架,从而便于未来的 OTA 升级和拓展功能的实现。
3)域集中式架构能进一步集中算力,减少冗余。分布式架构中的各个 ECU 之间算力无法协同,相互冗余,产生极大浪费。而域控制架构将原本分散的 ECU 进行算力集中,统一处理数据,减少算力冗余,更能满足高阶自动驾驶对于算力的高要求。
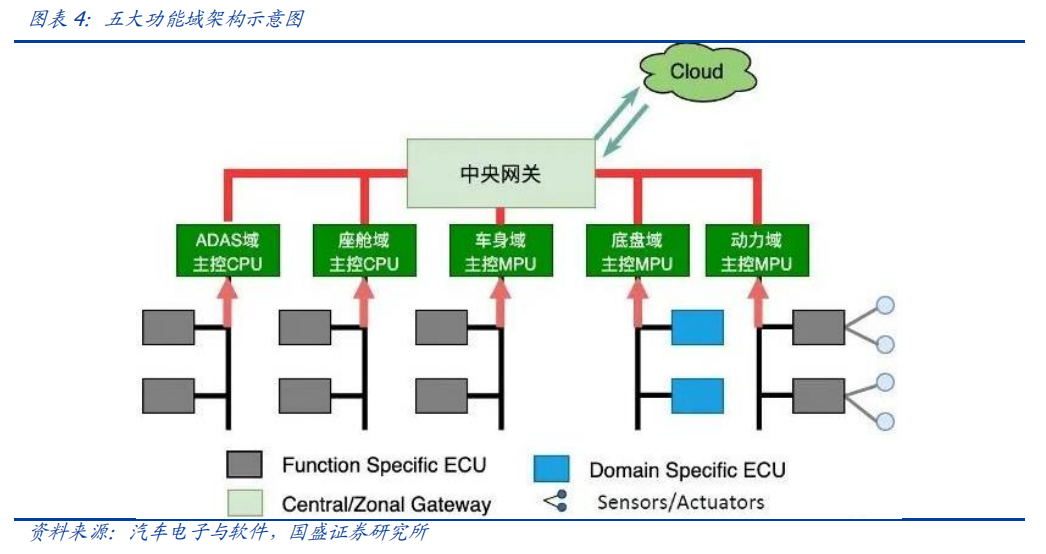
基于功能集中分区,博世等传统 Tier1将汽车电子控制系统分为动力域(安全)、底盘域(车辆运动)、座舱域(娱乐信息)、自动驾驶域(驾驶辅助)和车身域(车身电子)五域。
动力域用于动力总成的优化与控制,同时兼具电气智能故障诊断、智能节电、总线通信等功能。动力域控制器是一种智能化的动力总成管理单元,借助 CAN/FLEXRAY 实现变速器管理,引整管理电池监控交流发电机调节。其优势在于为多种动力系统单元(内燃机、电动机发电机、电池、变速箱)计算和分配扭矩、通过预判驾驶策略实现 CO2减排、通信网关等,主要用于动力总成的优化与控制,同时兼具电气智能故障诊断、智能节电、总线通信等功能。
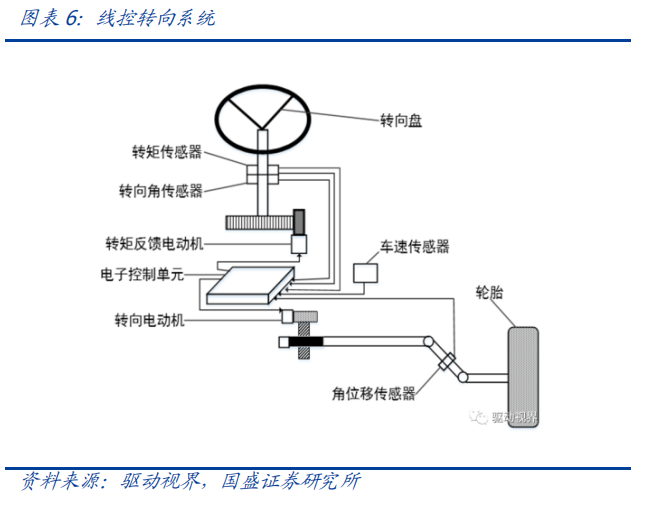
底盘域将集成整车制动、转向、悬架等车辆横向、纵向、垂向相关的控制功能,实现一体化控制。传动系统负责把发动机的动力传给驱动轮,可以分为机械式、液力式和电力等;行驶系统把汽车各个部分连成一个整体并对全车起支承作用;转向系统保证汽车能按驾驶员的意愿进行直线或转向行驶;制动系统迫使路面在汽车车轮上施加一定的与汽车行驶方向相反的外力,对汽车进行一定程度的强制制动,其功能是减速停车、驻车制动。底盘域可在传动系统、行驶系统以及制动系统中集成多种功能,较为常见的有空气弹簧的控制、悬架阻尼器的控制、后轮转向功能、电子稳定杆功能、转向柱位置控制功能等。若提前预留足够的算力,底盘域将集成整车制动、转向、悬架等车辆横向、纵向、垂向相关的控制功能,实现一体化控制。实现底盘域的功能,需要实现底盘域驱动、制动和转向算法的集成。
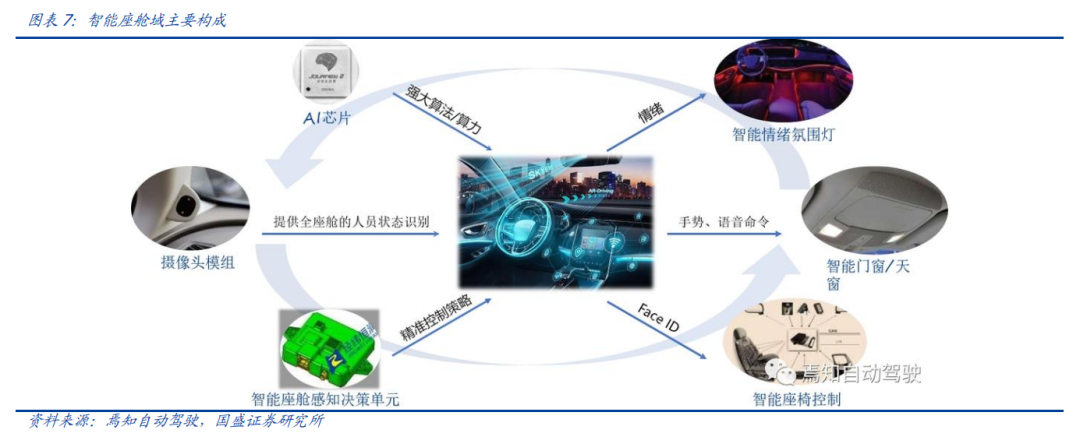
智能座舱域将 HUD(抬头显示)、仪表、车载信息娱乐等座舱电子集成,实现“一芯多屏”。智能座舱的构成部件主要包括全液晶仪表、大屏中控系统、车载信息娱乐系统、抬头显示系统、流媒体后视镜等,座舱域控制器通过以太网/MOST/CAN,实现抬头显示、仪表盘、导航等部件的融合,不仅具有传统座舱电子部件,还进一步整合智能驾驶ADAS 系统和车联网 V2X 系统,从而进一步优化智能驾驶、车载互联、信息娱乐等功能。智能座舱域可以实现“独立感知”和“交互方式升级”。一方面,车辆具有“感知”人的能力。另一方面,车内交互方式从仅有“物理按键交互”升级至“触屏交互”、“语音交互”、“手势交互”并存的状态,体验感更好。
自动驾驶域能够使车辆具备多传感器融合、定位、路径规划、决策控制、图像识别、高速通讯、数据处理的能力。自动驾驶域通常需要外接多个摄像头、毫米波雷达、激光雷达等等车载传感器来感知周围环境,通过传感器数据处理及多传感器信息融合,以及适当的工作模型制定相应的策略,进行决策与规划。域控制器的输入为各项传感器的数据,所进行的算法处理涵盖了感知、决策、控制三个层面,最终将输出传送至执行机构,进行车辆的横纵向控制。自动驾驶域所集成的功能基本不涉及机械部件,且与座舱域交互密切,并和智能座舱域一样需要处理大量数据,对算力要求较高,因此需要匹配核心运算力强的芯片,来满足自动驾驶的算力需求,简化设备,大大提高系统的集成度。
车身域将集成传统 BCM 功能和空调风门控制、胎压监测、PEPS、网关等功能,未来率先与智能座舱域融合。传统的车身控制器(BCM)功能主要包括内/外部车灯、雨刮、车窗、车门、电子转向锁等的控制,通过CAN/LIN与各个小节点进行通讯,节点较多,线束设计、软件控制逻辑均较复杂。而车身域控制器对车身节点实现了功能和零部件的集成,对于各个车身电子进行集中控制,对采集到的信息进行统一的分析和处理,效率更高;技术上,车身域控制器要求传统 BCM 开发经验、硬件集成能力、软件架构能力、芯片保供能力,未来将集成网关以及一些低等级 ADAS 功能,并率先与智能座舱域实现融合。
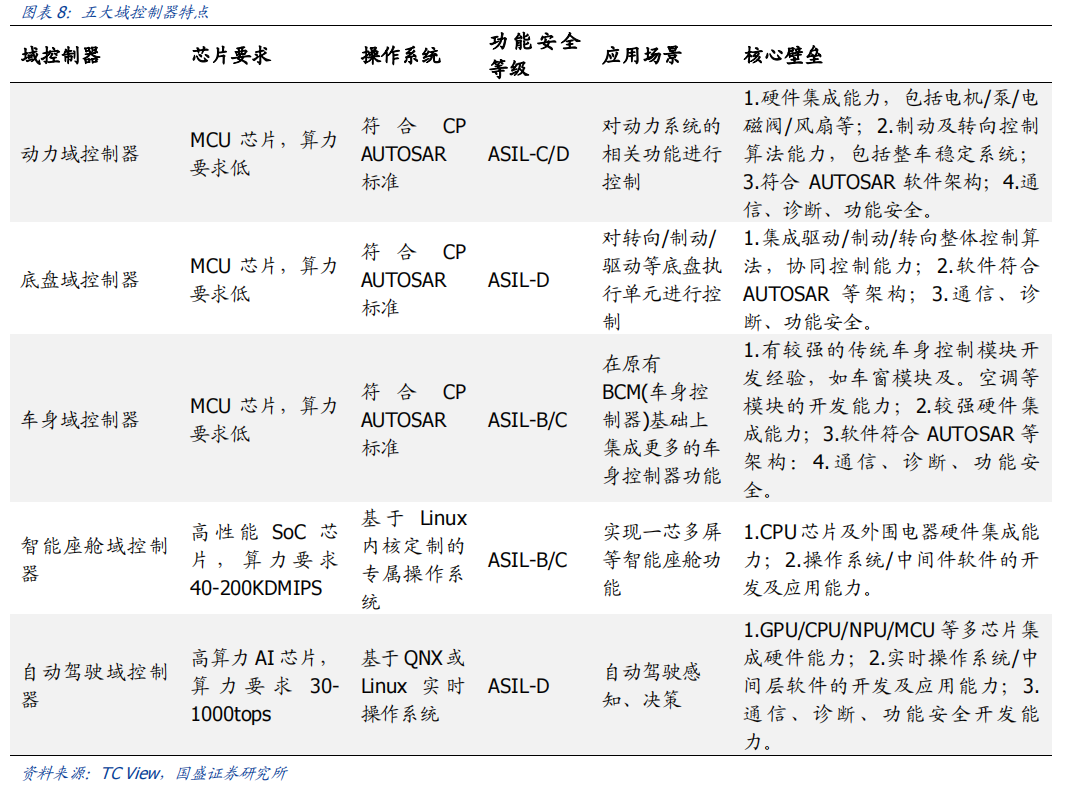
其中,智能座舱域、自动驾驶域是现阶段承载整车个性化智能体验的关键所在,也是目前车企的竞争焦点和布局重点。这两个域最能在整车端体现品牌的智能化差异,同时对传统功能系统供应链依赖度小;在现阶段迭代最快,其功能开发和实现需要涉及大量AI 运算,因此对芯片所提供算力、操作系统底层算法要求很高;而其他域控制器涉及整车安全的部件较多,因此对功能安全等级要求更高,对芯片算力要求和功能智能化程度相对较低。
从供应端来看,在汽车整体分布式架构集中化的进程中,由中控系统升级而来的智能座舱域与新兴的自动驾驶域的供应体系较为完整;而其他域则是对传统功能系统的进一步集成,涉及的供应商繁多,更容易产生利益冲突,且随着电子模组件实现规模生产后的降价趋势,未来价值增量有限。未来,底盘域、动力域、车身域有望进一步集成,按照车身区域进行“区域域”集成,向车辆集中式架构进一步发展。



从结构上来看,域控制器主要由硬件(主控芯片和元器件等)和软件(底层基础软件、中间件以及上层应用算法)构成,其功能的实现主要来自于主控芯片、软件操作系统及中间件、应用算法软件等多层次软硬件之间的有机结合。
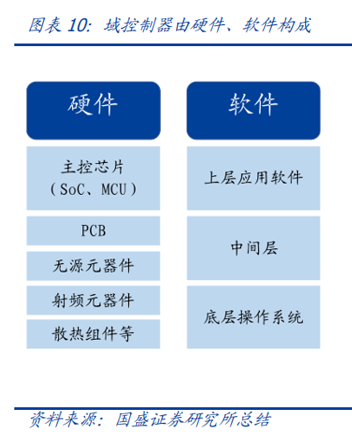
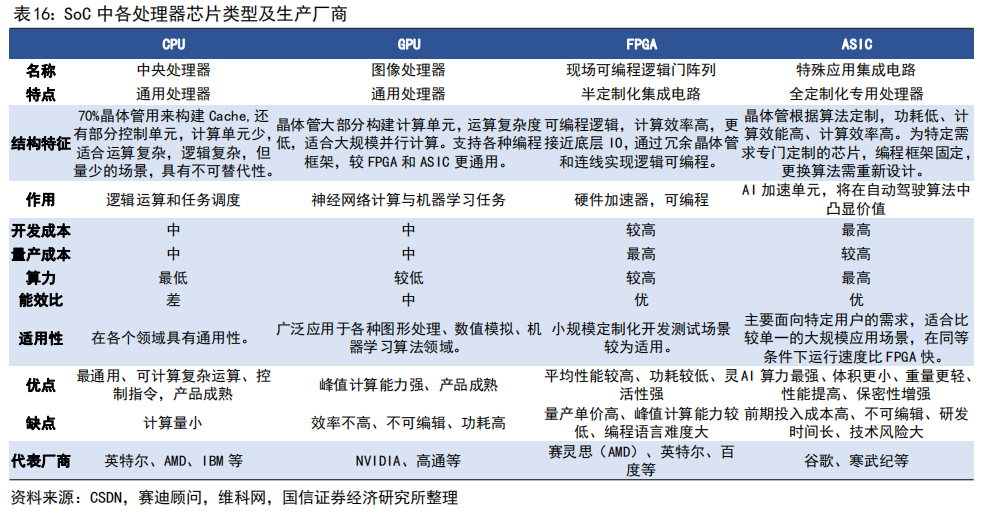
1)域控制器硬件主要包括主控芯片、PCB 板、电阻电容等无源元器件、射频元器件、支架、散热组件、密封性金属外壳等部分,其中主控芯片是核心部件。目前来看,对算力要求较高的智能座舱域和自动驾驶域所使用的主控芯片普遍由提供控车功能的MCU 芯片和包括中央处理器 CPU、图像处理器 GPU、音频处理器 DSP、深度学习加速单元 NPU、图像信号处理器 ISP、应用型专用集成芯片 ASIC、半定制电路芯片 FPGA 等部件的 SoC 芯片来共同提供所需算力,以支撑各种场景下的硬件加速需求。而底盘域、车身域、动力域由于相对较低的算力要求和成本考量,其主控芯片仍然多为较为传统的MCU 芯片。预计主控芯片的未来趋势会走向单独使用更高算力的 SoC 芯片。
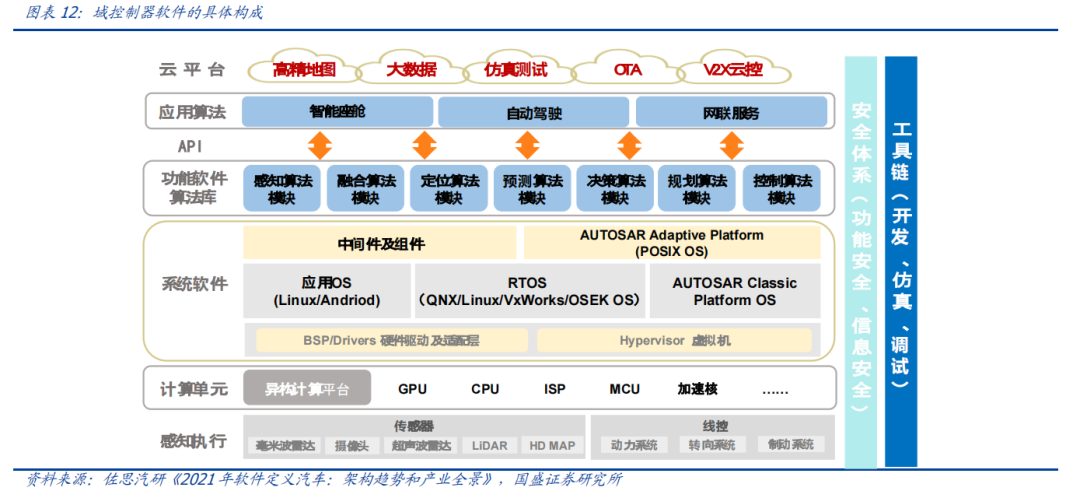
2)软件主要包括底层操作系统、中间件和开发框架、上层应用软件层。底层操作系统包括基础汽车操作系统、定制操作系统、虚拟机、系统内核等。中间层和开发框架包括AP AutoSar、SOA 等,处于底层操作系统与上层应用软件之间,为应用软件功能实现层屏蔽掉特定处理器和底层操作系统相关的细节,并实现与车辆网络、电源等系统交互所需的基础服务。上层应用软件层包括智能座舱 HMI、ADAS/AD 算法、网联算法、云平台等,实际实现对于车辆的控制与各种智能化功能。其中,预计底层操作系统将是众多Tier1 的发力重点,而上层应用软件层、中间层将是是各整车厂重点研发打造差异化的领域。

 0
0







