
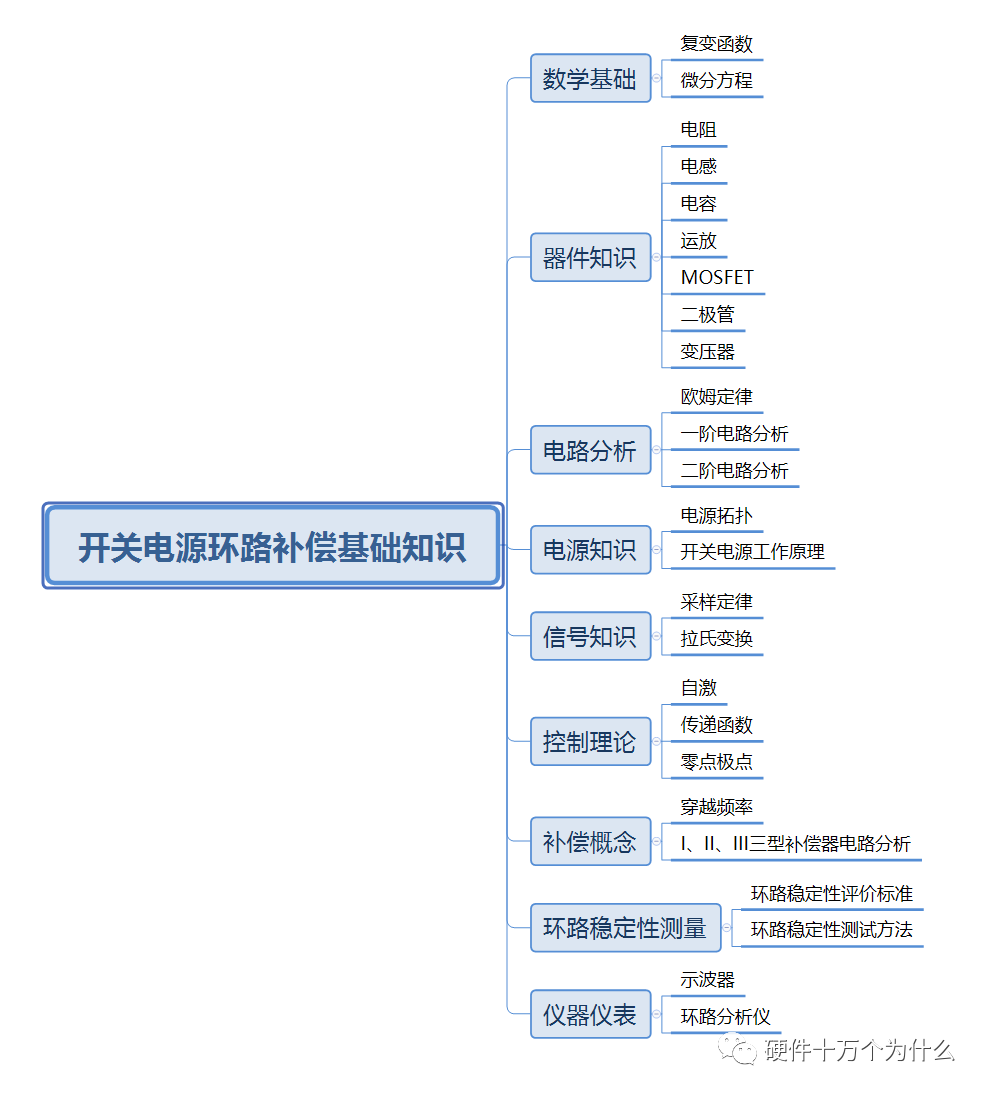
在整个电源的知识体系中,环路控制是一个至关重要的概念。开关电源之所以在各种情况下,能够保证将输入电压转换为稳定的输出电压,需要一种反馈机制和控制策略。为了确保开关电源能够在不同负载和输入条件下保持高效且稳定,需要一种精密的控制机制,这就是开关电源的环路控制。
我们将深入探讨开关电源的环路控制,旨在确保开关电源提供稳定、精确且高效的输出电压。我们将了解环路控制的基本原理、常用的控制策略以及如何调整控制参数以满足不同的应用需求。通过深入研究开关电源的环路控制,我们将更好地理解电源电子学中的关键概念,从而在设计和应用中取得更好的效果。
环路控制的学习难点
电源环路控制可以是相对复杂和难以理解的,主要有以下几个原因:
(1)多种元件和电路组件:电源环路控制涉及到多种电子元件和电路组件,如开关电源、稳压器、电感、电容、电阻等。这些元件之间的相互作用和联动可以使系统变得复杂,需要深入理解各个组件的工作原理以便有效地控制电源输出。
(2)多种控制策略:不同的电源环路控制策略可以应用于不同的应用场景,例如开环控制和闭环控制。开环控制只依赖于输入信号来控制电源输出,而闭环控制通过反馈机制来调整输出以使其达到期望值。
(3)非线性和时变性:电源环路通常是非线性和时变的系统,这意味着系统的响应不仅取决于输入信号,还取决于时间和各种非线性效应。
(4)电磁干扰和稳定性:电源环路控制需要考虑电磁干扰和系统稳定性。电磁干扰可以影响电源输出的质量,而系统稳定性则确保电源不会因控制错误而失控或损坏。
(5)数学和工程知识:理解电源环路控制通常需要一定的数学和工程知识,包括电路分析、控制理论、信号处理和功率电子等领域的知识。关于拉普拉斯变换、极点、零点等概念不仅要知道,还需要熟练掌握。
尽管电源环路控制可能具有一定的复杂性,但对于工程师和专业人士来说,深入了解这些概念是非常重要的,因为它们在许多电子设备和系统中都起着关键作用,如电源适配器、电池管理系统、变频器等。
反馈环路控制系统的理解
反馈环路控制是在各种工程和科学领域中广泛应用的关键技术,它用于保持系统的稳定性、精度和性能。本节将通过比较车道保持系统和开关电源的反馈环路控制,来深入了解如何通过精确调整反馈环路来实现所需的控制和性能。让大家直观感受到一个反馈环路控制系统的本质。
|
|
车道保持系统的反馈环路控制 |
开关电源的反馈环路控制 |
|
目标和输入 |
车道保持系统的目标是:无论车道如何变化,车速如何变化,要确保汽车保持在道路中心线上。输入条件是:车辆当前的位置和方向。 |
开关电源的目标是:无论输入电压和负载条件如何变化,要确保稳定的输出电压是目标值。输入条件是:输入电压值和负载值。 |
|
反馈 |
为了实现目标,车道保持系统使用传感器来连续监测车辆相对于道路中心线的偏移。这些传感器提供反馈信号,告知系统车辆是否偏离了道路中心线。 |
为了实现目标,开关电源使用电阻分压得到一个电压值,用这个电压值与参考电压进行比较,来监测输出电压,这个电路提供反馈信号,告知系统当前的输出电压是否符合期望。 |
|
控制 |
控制器是车道保持系统的核心,它基于传感器提供的反馈信号来进行决策。控制器比较实际位置与期望位置的差异,并计算出需要施加的方向盘调整量。 |
控制器是开关电源的核心部分,它基于反馈信号来进行决策。控制器用于比较实际输出电压与期望输出电压之间的差异,并计算出需要调整开关电源工作方式的控制动作。 |
|
执行 |
执行器是控制器的执行部分,它将控制器计算出的调整量转化为实际的方向盘运动,以使车辆重新回到道路中心线上。 |
在开关电源中,执行器是开关器件MOSFET,它们负责控制电源的开关状态,控制器控制MOSFET的打开时间,以调整输出电压。 |
|
调整 |
在车道保持系统中,控制器需要精确调整,以确保系统的稳定性和性能。通过调整这些参数,可以实现对系统的精确控制,减小超调量或快速恢复到目标轨迹。 |
开关电源的控制器中的参数需要精确调整,以确保输出电压的稳定性和性能。通过调整参数,可以实现对电源的精密控制,提高动态响应速度或适应不同的输入电压。 |
控制系统的收敛问题是指在控制系统中,系统的输出是否能够在有限的时间内收敛到所期望的稳定状态或目标值。这个问题在控制系统设计和分析中非常重要,因为它直接关系到系统的性能、稳定性和可控性。以下是一些关于控制系统收敛的重要问题和考虑因素:
(1)稳定性与收敛性的关系
控制系统的稳定性是指系统在有限的时间内输出是否有界,而收敛性是指系统是否能够在有限的时间内到达某个目标或稳定状态。稳定性通常是收敛性的前提,因为一个不稳定的系统不太可能正确地收敛到目标。
对于车道保持系统来说,当车道偏离的时候,是否能够在不碰到路边护栏的前提下,尽快让汽车回到正确的车道位置和行进方向。如果调整过程中,调整的不及时,或者调整的幅度过大,偏离的幅度过大则会撞击护栏,如图10.1(a)所示。如果收敛时间过久,则系统的收敛性不好,系统始终处于调整的状态,如图10.1(b)所示。这些情况我们都认为这个车道保持系统的稳定性不好。
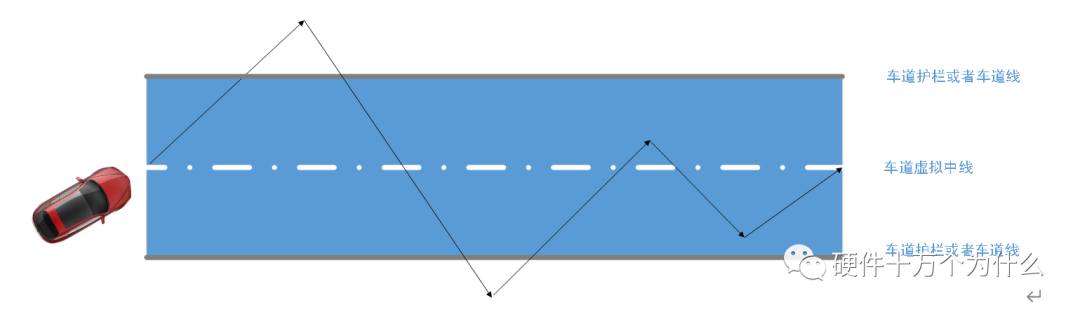
(a)调整幅度过大
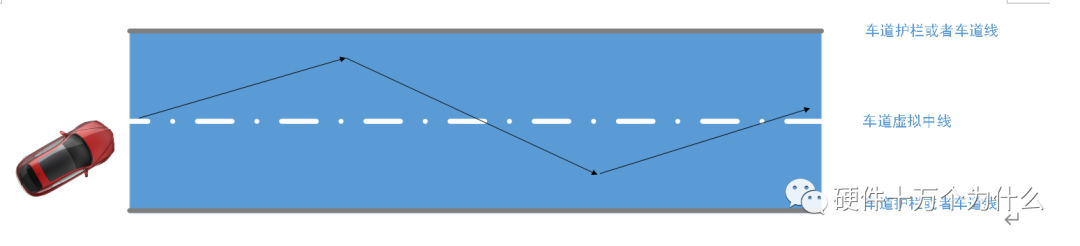
(b)收敛周期过长
图 10.1车道保持系统的收敛性和稳定性问题举例
对于电源控制系统是一样的,如果调整的不及时,或者调整的幅度过大,则会出现电压偏离过大,超出用电器件的承受范围导致器件损坏,造成类似撞车的事故,示波器在时域上看到的情况如图10.2(a)所示。如果收敛时间过久,则系统的收敛性不好,系统始终处于调整的状态,我们可以观察到电源的占空比不停的调整,在电压输出端始终有震荡,在时域上,我们可以观测到开关节点不停的抖动,如图10.2(b)所示。
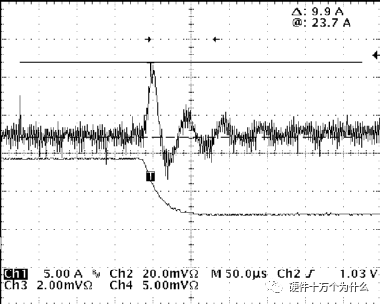
(a)电压变化幅值过大
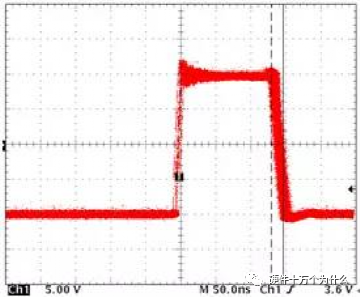
(b)占空比反复调整造成的开关节点抖动
图 10.1开关电源系统的收敛性和稳定性问题
(2)控制器设计
控制系统的控制器设计对于系统的收敛性具有重要影响。合适的控制器设计可以确保系统在给定的输入条件下收敛到期望状态。常见的控制器设计方法包括比例-积分-微分(PID)控制器、状态反馈控制、模型预测控制等。
(3)控制策略选择
控制系统的选择和调整控制策略也会影响系统的收敛性。不同的控制策略适用于不同的应用和系统类型。例如,对于快速收敛,可以选择高增益的控制策略,但这可能会导致系统的稳定性问题。
(4)初始条件
控制系统的初始条件对于系统的收敛性也很重要。系统的初始状态可以影响系统是否能够在有限时间内收敛到期望状态。在某些情况下,需要采取特殊措施来确保系统从非常不稳定的初始条件下收敛。对于车道保持系统,汽车的起始位置和方向非常重要。对于开关电源系统的能够承载的最大的负载变化率是重要指标。
(5)系统动态特性
系统的动态特性,包括系统的阶数、传递函数和零极点分布等,也会影响系统的收敛性。高阶系统通常具有更复杂的动态特性,可能需要更复杂的控制策略来实现良好的收敛性。我们在优化电源的环路系统的主要工作,就是调整零极点的分布,获得更好的系统收敛性,包括控制功率部分的零极点,以及通过增加环路补偿电路来调整整个反馈环路的的特性。
(6)外部干扰和噪声
控制系统的收敛性通常受到外部干扰和噪声的影响。控制系统的设计需要考虑如何抵抗这些干扰,以确保系统在面对不确定性时仍能够收敛到期望状态。
控制系统的收敛性是控制工程中一个关键的问题,涉及到控制器设计、控制策略选择、初始条件、系统动态特性和外部干扰等多个方面。合适的控制设计和策略选择可以确保系统在有限时间内有效地收敛到期望状态,从而满足特定应用的性能需求。
 0
0







