前言:
之前有很多朋友问在rk平台上怎么适配mipi摄像头,或者说在设备树里面去修改,今天分享一篇不错的文章给大家!
MIPI-CSI:
RK3588s MIPI-CSI资源介绍:
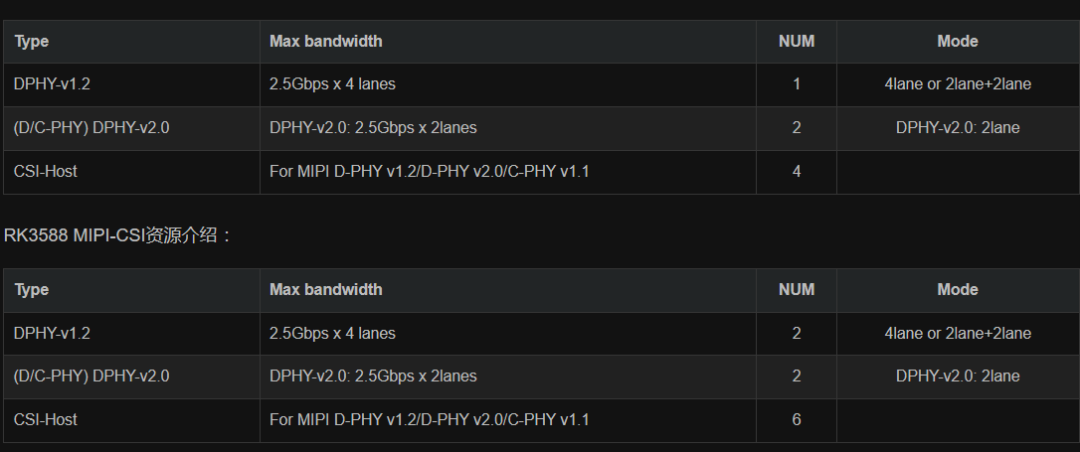
注意:D/C-PHY 仅用作DPHY-V2.0。
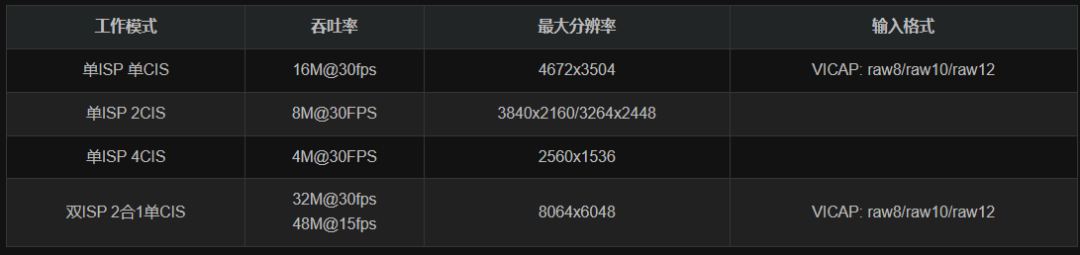
VICAP:
RK3588/RK3588S VICAP支持输入输出规格:

ISP:
RK3588/RK3588s 的ISP属于RK ISP v3.0版本,拥有2个ISP:
注:CIS全称CMOS Image Sensor
RK3588 Camera相关 DTS配置介绍:
这里以RK3588-EVB开发板的camera配置来进行说明;RK3588 的camera通路,下图是RK3588 camera连接链路示意图,可以支持7路camera。
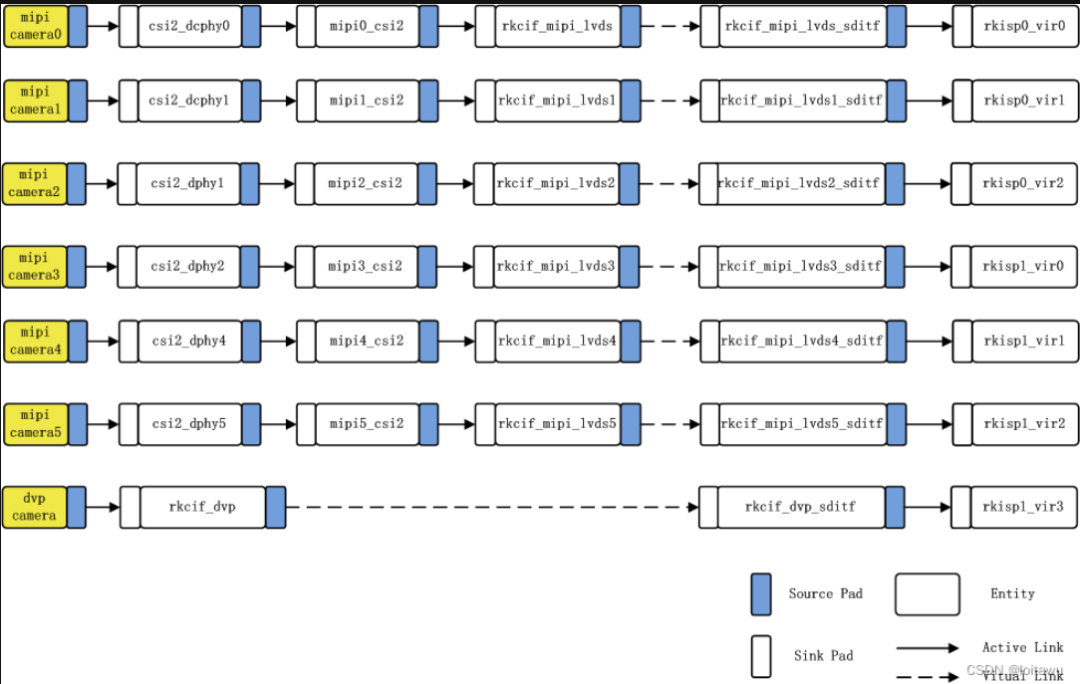
框图说明:
-
rk3588支持两个dcphy,节点名称分别为csi2_dcphy0/csi2_dcphy1。每个dcphy硬件支持RX/TX同时使用,对于camera输入使用的是RX。支持DPHY/CPHY协议复用;需要注意的是同一个dcphy的TX/RX只能同时使用DPHY或同时使用CPHY。其他dcphy参数请查阅rk3588数据手册。
-
rk3588支持2个dphy硬件,这里我们称之为dphy0_hw/dphy1_hw,两个dphy硬件都可以工作在full mode 和split mode两种模式下。
dphy0_hw:
-
full mode:节点名称使用csi2_dphy0,最多支持4 lane。
-
split mode: 拆分成2个phy使用,分别为csi2_dphy1(使用0/1 lane)、csi2_dphy2(使用2/3 lane),每个phy最多支持2 lane。
-
当dphy0_hw使用full mode时,链路需要按照csi2_dphy1这条链路来配置,但是节点名称csi2_dphy1需要修改为csi2_dphy0,软件上是通过phy的序号来区分phy使用的模式。
dphy1_hw:
-
full mode:节点名称使用csi2_dphy3,最多支持4 lane。
-
split mode: 拆分成2个phy使用,分别为csi2_dphy4(使用0/1 lane)、csi2_dphy5(使用2/3 lane),每个phy最多支持2 lane。
-
当dphy1_hw使用full mode时,链路需要按照csi2_dphy4这条链路来配置,但是节点名称csi2_dphy4需要修改为csi2_dphy3,软件上是通过phy的序号来区分phy使用的模式。
使用上述mipi phy节点,需要把对应的物理节点配置上。
(csi2_dcphy0_hw/csi2_dcphy1_hw/csi2_dphy0_hw/csi2_dphy1_hw) 每个mipi phy都需要一个csi2模块来解析mipi协议,节点名称分别为mipi0_csi2~mipi5_csi2。
rk3588所有camera数据都需要通过vicap,再链接到isp。rk3588仅支持一个vicap硬件,这个vicap支持同时输入6路mipi phy,及一路dvp数据,所以我们将vicap分化成rkcif_mipi_lvds~rkcif_mipi_lvds5、rkcif_dvp等7个节点,各个节点的绑定关系需要严格按照框图的节点序号配置。
每个vicap节点与isp的链接关系,通过对应虚拟出的XXX_sditf来指明链接关系。
rk3588支持2个isp硬件,每个isp设备可虚拟出多个虚拟节点,软件上通过回读的方式,依次从ddr读取每一路的图像数据进isp处理。对于多摄方案,建议将数据流平均分配到两个isp上。
直通与回读模式:
-
直通:指数据经过vicap采集,直接发送给isp处理,不存储到ddr。需要注意的是hdr直通时,只有短帧是真正的直通,长帧需要存在ddr,isp再从ddr读取。
-
回读:指数据经过vicap采集到ddr,应用获取到数据后,将buffer地址推送给isp,isp再从ddr获取图像数据。
再dts配置时,一个isp硬件,如果只配置一个虚拟节点,默认使用直通模式,如果配置了多个虚拟节点默认使用回读模式。
单路Camera的dts配置说明:
RK3588 EVB开发板默认只有1路camera,其链接方式如上图的mipi camera0。DTS配置在kernel-5.10\arch\arm64\boot\dts\rockchip\rk3588-evb1-imx415.dtsi,可以结合上的图来理解这个dts的配置,如下:
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2021 Rockchip Electronics Co., Ltd.
*
*/
/ {
红外滤光片(IRCUT)由两根线控制,对这两根线施加3.5v~6v的电源,通过对IRCUT供电电源的正负极对调,且满足通电时间100ms±10%,能够实现IRCUT的切换。驱动通过两个gpio控制电机驱动器的电流输出方向,gpio命令为open(红线)、close(黑线)。电流由open流向close,为红外截止滤光片,白天工作状态;电流由close流向open,为白玻璃片,夜晚工作状态。其配置如下:
cam_ircut0: cam_ircut {
status = "okay";
compatible = "rockchip,ircut";
ircut-open-gpios = <&gpio3 RK_PC1 GPIO_ACTIVE_HIGH>;
ircut-close-gpios = <&gpio3 RK_PC0 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index =;
rockchip,camera-module-facing = "back";
};
};
//这里使用的是csi2_dcphy0
&csi2_dcphy0 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi_in_ucam0: endpoint@1 {
reg =;
//sensor端的port名
remote-endpoint = <&imx415_out0>;
//mipi lane数,1lane为,4lane为,这里配置的是4lane,这个必须要配置否则会无法识别mipi类型
data-lanes =;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; csidcphy0_out: endpoint@0 {
reg =;
//mipi0_csi2_input是对应的isp端的port名
remote-endpoint = <&mipi0_csi2_input>;
};
};
};
};
&i2c5 {
status = "okay";
imx415: imx415@1a {
compatible = "sony,imx415";//需要与驱动定义的字符串一致
reg =;//sensor的I2C设备地址,7位
clocks = <&cru CLK_MIPI_CAMARAOUT_M1>;//sensor clockin配置
clock-names = "xvclk";
pinctrl-names = "default";
pinctrl-0 = <&mipim0_camera1_clk>;
//电源配置
power-domains = <&power RK3588_PD_VI>;
//power管脚配置
pwdn-gpios = <&gpio1 RK_PA0 GPIO_ACTIVE_HIGH>;
avdd-supply = <&vcc_mipidcphy0>;
//模组编号,该编号不要重复
rockchip,camera-module-index =;
//模组朝向,有前摄“front”、后摄“back”
rockchip,camera-module-facing = "back";
//模组名称
rockchip,camera-module-name = "CMK-OT2022-PX1";
//IR CUT设备
rockchip,camera-module-lens-name = "IR0147-50IRC-8M-F20";
lens-focus = <&cam_ircut0>;
port {
imx415_out0: endpoint {
//mipi dphy端的port名
remote-endpoint = <&mipi_in_ucam0>;
//mipi lane数,1lane为,4lane为,这里配置的是4lane,这个必须要配置否则会无法识别mipi类型
data-lanes =;
};
};
};
};
&mipi_dcphy0 {
status = "okay";
};
&mipi0_csi2 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi0_csi2_input: endpoint@1 {
reg =;
//csi2 dphy端的port名
remote-endpoint = <&csidcphy0_out>;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; mipi0_csi2_output: endpoint@0 {
reg =;
//vicap端的port名
remote-endpoint = <&cif_mipi_in0>;
};
};
};
};
//vicap的配置,这里用rkcif节点代表vicap
&rkcif {
status = "okay";
};
&rkcif_mipi_lvds {
status = "okay";
port {
cif_mipi_in0: endpoint {
//csi2 host端的port名
remote-endpoint = <&mipi0_csi2_output>;
};
};
};
&rkcif_mipi_lvds_sditf {
status = "okay";
port {
mipi_lvds_sditf: endpoint {
//isp虚拟设备端port名
remote-endpoint = <&isp0_vir0>;
};
};
};
&rkcif_mmu {
status = "okay";
};
&rkisp0 {
status = "okay";
};
&isp0_mmu {
status = "okay";
};
&rkisp0_vir0 {
status = "okay";
port { #address-cells =; #size-cells =; isp0_vir0: endpoint@0 {
reg =;
//vicap mipi sditf的端点名
remote-endpoint = <&mipi_lvds_sditf>;
};
};
};
6路camera的DTS配置说明:
基于RK3588-EVB开发板加6路camera转接板可以实现6路camera,其DTS配置在kernel-5.10\arch\arm64\boot\dts\rockchip\rk3588-evb1-cam-6x.dtsi。6路camera的链路可以参考上面的图,并根据图来理解dts配置,如下:
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2021 Rockchip Electronics Co., Ltd.
*
*/
//下面是phy的配置一共6个phy
&csi2_dcphy0 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi_in_ucam0: endpoint@1 {
reg =;
remote-endpoint = <&imx464_out0>;
data-lanes =;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; csidcphy0_out: endpoint@0 {
reg =;
remote-endpoint = <&mipi0_csi2_input>;
};
};
};
};
&csi2_dcphy1 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi_in_ucam1: endpoint@1 {
reg =;
remote-endpoint = <&imx464_out1>;
data-lanes =;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; csidcphy1_out: endpoint@0 {
reg =;
remote-endpoint = <&mipi1_csi2_input>;
};
};
};
};
&csi2_dphy0_hw {
status = "okay";
};
&csi2_dphy1_hw {
status = "okay";
};
&csi2_dphy1 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi_in_ucam2: endpoint@1 {
reg =;
remote-endpoint = <&imx464_out2>;
data-lanes =;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; csidphy1_out: endpoint@0 {
reg =;
remote-endpoint = <&mipi2_csi2_input>;
};
};
};
};
&csi2_dphy2 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi_in_ucam3: endpoint@1 {
reg =;
remote-endpoint = <&imx464_out3>;
data-lanes =;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; csidphy2_out: endpoint@0 {
reg =;
remote-endpoint = <&mipi3_csi2_input>;
};
};
};
};
&csi2_dphy4 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi_in_ucam4: endpoint@1 {
reg =;
remote-endpoint = <&imx464_out4>;
data-lanes =;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; csidphy4_out: endpoint@0 {
reg =;
remote-endpoint = <&mipi4_csi2_input>;
};
};
};
};
&csi2_dphy5 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi_in_ucam5: endpoint@1 {
reg =;
remote-endpoint = <&imx464_out5>;
data-lanes =;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; csidphy5_out: endpoint@0 {
reg =;
remote-endpoint = <&mipi5_csi2_input>;
};
};
};
};
//下面是sensor的配置一共配置imx464_0到imx464_5 六个sensor
&i2c3 {
status = "okay";
/* module 77/79 0x1a 78/80 0x36 */
imx464_2: imx464-2@1a {
compatible = "sony,imx464";
status = "okay";
reg =;
clocks = <&cru CLK_MIPI_CAMARAOUT_M3>;
clock-names = "xvclk";
power-domains = <&power RK3588_PD_VI>;
pinctrl-names = "default";
pinctrl-0 = <&mipim0_camera3_clk>;
avdd-supply = <&vcc_mipicsi0>;
pwdn-gpios = <&gpio1 RK_PB3 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index =;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT1980-PX1";
rockchip,camera-module-lens-name = "SHG102";
port {
imx464_out2: endpoint {
remote-endpoint = <&mipi_in_ucam2>;
data-lanes =;
};
};
};
imx464_3: imx464-3@36 {
compatible = "sony,imx464";
status = "okay";
reg =;
clocks = <&cru CLK_MIPI_CAMARAOUT_M3>;
clock-names = "xvclk";
power-domains = <&power RK3588_PD_VI>;
avdd-supply = <&vcc_mipicsi0>;
pwdn-gpios = <&gpio1 RK_PA7 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index =;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT1980-PX1";
rockchip,camera-module-lens-name = "SHG102";
port {
imx464_out3: endpoint {
remote-endpoint = <&mipi_in_ucam3>;
data-lanes =;
};
};
};
};
&i2c4 {
status = "okay";
pinctrl-0 = <&i2c4m3_xfer>;
/* 77/79 0x1a 78/80 0x36 */
imx464_4: imx464-4@1a {
compatible = "sony,imx464";
status = "okay";
reg =;
clocks = <&cru CLK_MIPI_CAMARAOUT_M4>;
clock-names = "xvclk";
power-domains = <&power RK3588_PD_VI>;
pinctrl-names = "default";
pinctrl-0 = <&mipim0_camera4_clk>;
avdd-supply = <&vcc_mipicsi1>;
pwdn-gpios = <&gpio1 RK_PB4 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index =;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT1980-PX1";
rockchip,camera-module-lens-name = "SHG102";
port {
imx464_out4: endpoint {
remote-endpoint = <&mipi_in_ucam4>;
data-lanes =;
};
};
};
imx464_5: imx464-5@36 {
compatible = "sony,imx464";
status = "okay";
reg =;
clocks = <&cru CLK_MIPI_CAMARAOUT_M4>;
clock-names = "xvclk";
power-domains = <&power RK3588_PD_VI>;
avdd-supply = <&vcc_mipicsi1>;
pwdn-gpios = <&gpio1 RK_PB0 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index =;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT1980-PX1";
rockchip,camera-module-lens-name = "SHG102";
port {
imx464_out5: endpoint {
remote-endpoint = <&mipi_in_ucam5>;
data-lanes =;
};
};
};
};
&i2c5 {
status = "okay";
/* 77/79 0x1a 78/80 0x36 */
imx464_0: imx464-0@1a {
compatible = "sony,imx464";
status = "okay";
reg =;
clocks = <&cru CLK_MIPI_CAMARAOUT_M1>;
clock-names = "xvclk";
power-domains = <&power RK3588_PD_VI>;
pwdn-gpios = <&gpio1 RK_PA0 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&mipim0_camera1_clk>;
avdd-supply = <&vcc_mipidcphy0>;
rockchip,camera-module-index =;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT1980-PX1";
rockchip,camera-module-lens-name = "SHG102";
port {
imx464_out0: endpoint {
remote-endpoint = <&mipi_in_ucam0>;
data-lanes =;
};
};
};
imx464_1: imx464-1@36 {
compatible = "sony,imx464";
status = "okay";
reg =;
clocks = <&cru CLK_MIPI_CAMARAOUT_M2>;
clock-names = "xvclk";
power-domains = <&power RK3588_PD_VI>;
pinctrl-names = "default";
pinctrl-0 = <&mipim0_camera2_clk>;
pwdn-gpios = <&gpio1 RK_PA1 GPIO_ACTIVE_HIGH>;
avdd-supply = <&vcc_mipidcphy0>;
rockchip,camera-module-index =;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-OT1980-PX1";
rockchip,camera-module-lens-name = "SHG102";
port {
imx464_out1: endpoint {
remote-endpoint = <&mipi_in_ucam1>;
data-lanes =;
};
};
};
};
&mipi_dcphy0 {
status = "okay";
};
&mipi_dcphy1 {
status = "okay";
};
//下面是mipi 控制器的配置,共6个控制器
&mipi0_csi2 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi0_csi2_input: endpoint@1 {
reg =;
remote-endpoint = <&csidcphy0_out>;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; mipi0_csi2_output: endpoint@0 {
reg =;
remote-endpoint = <&cif_mipi_in0>;
};
};
};
};
&mipi1_csi2 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi1_csi2_input: endpoint@1 {
reg =;
remote-endpoint = <&csidcphy1_out>;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; mipi1_csi2_output: endpoint@0 {
reg =;
remote-endpoint = <&cif_mipi_in1>;
};
};
};
};
&mipi2_csi2 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi2_csi2_input: endpoint@1 {
reg =;
remote-endpoint = <&csidphy1_out>;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; mipi2_csi2_output: endpoint@0 {
reg =;
remote-endpoint = <&cif_mipi_in2>;
};
};
};
};
&mipi3_csi2 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi3_csi2_input: endpoint@1 {
reg =;
remote-endpoint = <&csidphy2_out>;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; mipi3_csi2_output: endpoint@0 {
reg =;
remote-endpoint = <&cif_mipi_in3>;
};
};
};
};
&mipi4_csi2 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi4_csi2_input: endpoint@1 {
reg =;
remote-endpoint = <&csidphy4_out>;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; mipi4_csi2_output: endpoint@0 {
reg =;
remote-endpoint = <&cif_mipi_in4>;
};
};
};
};
&mipi5_csi2 {
status = "okay";
ports { #address-cells =; #size-cells =; port@0 {
reg =; #address-cells =; #size-cells =; mipi5_csi2_input: endpoint@1 {
reg =;
remote-endpoint = <&csidphy5_out>;
};
};
port@1 {
reg =; #address-cells =; #size-cells =; mipi5_csi2_output: endpoint@0 {
reg =;
remote-endpoint = <&cif_mipi_in5>;
};
};
};
};
//下面是vicap配置,分为6个vicap节点及对应的6个sditf虚拟链接节点
&rkcif {
status = "okay";
};
&rkcif_mipi_lvds {
status = "okay";
port {
cif_mipi_in0: endpoint {
remote-endpoint = <&mipi0_csi2_output>;
};
};
};
&rkcif_mipi_lvds_sditf {
status = "okay";
port {
mipi_lvds_sditf: endpoint {
remote-endpoint = <&isp0_vir0>;
};
};
};
&rkcif_mipi_lvds1 {
status = "okay";
port {
cif_mipi_in1: endpoint {
remote-endpoint = <&mipi1_csi2_output>;
};
};
};
&rkcif_mipi_lvds1_sditf {
status = "okay";
port {
mipi1_lvds_sditf: endpoint {
remote-endpoint = <&isp1_vir0>;
};
};
};
&rkcif_mipi_lvds2 {
status = "okay";
port {
cif_mipi_in2: endpoint {
remote-endpoint = <&mipi2_csi2_output>;
};
};
};
&rkcif_mipi_lvds2_sditf {
status = "okay";
port {
mipi2_lvds_sditf: endpoint {
remote-endpoint = <&isp0_vir1>;
};
};
};
&rkcif_mipi_lvds3 {
status = "okay";
port {
cif_mipi_in3: endpoint {
remote-endpoint = <&mipi3_csi2_output>;
};
};
};
&rkcif_mipi_lvds3_sditf {
status = "okay";
port {
mipi3_lvds_sditf: endpoint {
remote-endpoint = <&isp1_vir1>;
};
};
};
&rkcif_mipi_lvds4 {
status = "okay";
port {
cif_mipi_in4: endpoint {
remote-endpoint = <&mipi4_csi2_output>;
};
};
};
&rkcif_mipi_lvds4_sditf {
status = "okay";
port {
mipi4_lvds_sditf: endpoint {
remote-endpoint = <&isp0_vir2>;
};
};
};
&rkcif_mipi_lvds5 {
status = "okay";
port {
cif_mipi_in5: endpoint {
remote-endpoint = <&mipi5_csi2_output>;
};
};
};
&rkcif_mipi_lvds5_sditf {
status = "okay";
port {
mipi5_lvds_sditf: endpoint {
remote-endpoint = <&isp1_vir2>;
};
};
};
&rkcif_mmu {
status = "okay";
};
//下面是isp的配置,将2个isp分为6个虚拟节点,每个isp虚拟出3个节点
&rkisp0 {
status = "okay";
};
&isp0_mmu {
status = "okay";
};
&rkisp0_vir0 {
status = "okay";
port { #address-cells =; #size-cells =; isp0_vir0: endpoint@0 {
reg =;
remote-endpoint = <&mipi_lvds_sditf>;
};
};
};
&rkisp0_vir1 {
status = "okay";
port { #address-cells =; #size-cells =; isp0_vir1: endpoint@0 {
reg =;
remote-endpoint = <&mipi2_lvds_sditf>;
};
};
};
&rkisp0_vir2 {
status = "okay";
port { #address-cells =; #size-cells =; isp0_vir2: endpoint@0 {
reg =;
remote-endpoint = <&mipi4_lvds_sditf>;
};
};
};
&rkisp1 {
status = "okay";
};
&isp1_mmu {
status = "okay";
};
&rkisp1_vir0 {
status = "okay";
port { #address-cells =; #size-cells =; isp1_vir0: endpoint@0 {
reg =;
remote-endpoint = <&mipi1_lvds_sditf>;
};
};
};
&rkisp1_vir1 {
status = "okay";
port { #address-cells =; #size-cells =; isp1_vir1: endpoint@0 {
reg =;
remote-endpoint = <&mipi3_lvds_sditf>;
};
};
};
&rkisp1_vir2 {
status = "okay";
port { #address-cells =; #size-cells =; isp1_vir2: endpoint@0 {
reg =;
remote-endpoint = <&mipi5_lvds_sditf>;
};
};
};
 0
0