
1、反馈在何时开始振荡
设计的目的是构建稳定可靠的反馈补偿电路参数或主反馈PID控制参数,而不会希望闭环系统产生振荡。为此,我们很有必要考虑当具备哪些条件时,振荡才会发生。下图是一个典型的、非常简单的闭环系统,我们可以很容易的列出其传递函数,而且也能容易分析在哪种情况下会发生振荡。
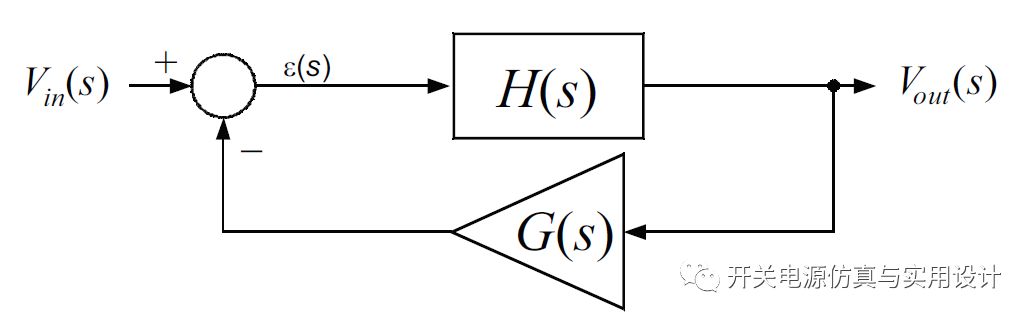
其传递函数为:
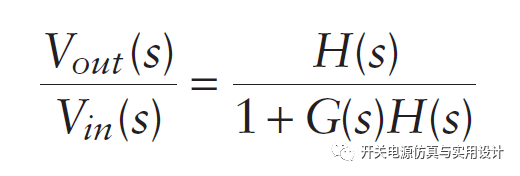
通常我们把H(s) * G(s)称为环路增益(loop gain),或简写为T(s)。如果反馈系统转为自激振荡器,其必然满足当输入信号量值几乎消失时,输出信号还必须要存在较大的输出值。为了达成这个调节,必然满足下式:
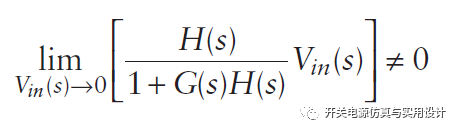
很容易得知当Vin(s)几乎消失时,Vout(s)还要能维持较大的输出,其传递函数的增益必然是趋于无穷大,也就是这个传递函数的分母多项式趋于零。
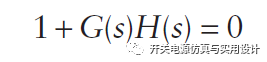
那么也就是环路增益T(s)需等于-1,易得知:当环路增益为1,符号为负(对正弦信号来说只是发生180°的相位变化)。就可以在数学上列出这两个满足振荡的条件:
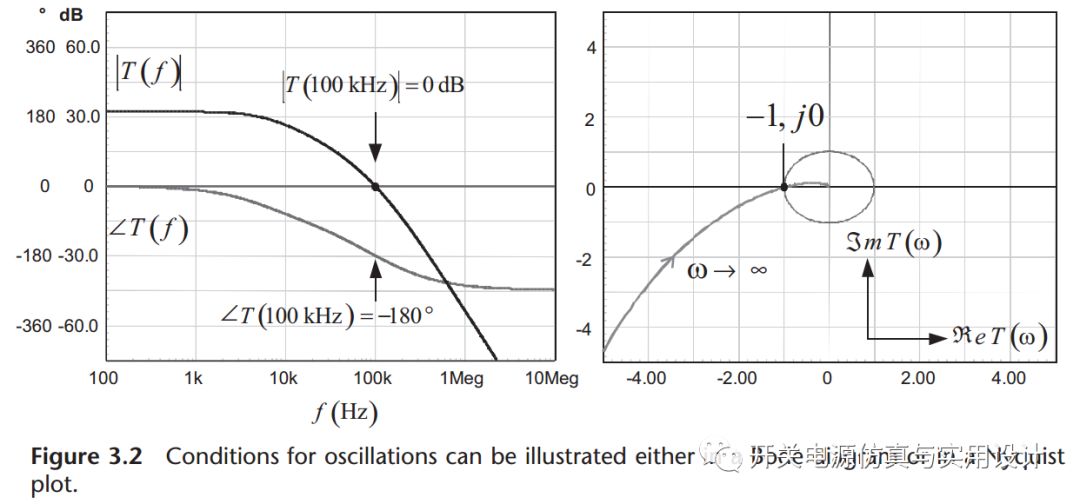
当上述两个条件同时满足时,就有了进入振荡的条件。从实际来看,在闭环控制系统中,这意味着反馈校正信号不在与输出反相,而是与扰动信号完全相同的幅度和相位返回输出端。 在Bode图中,意味这T(s)穿过0dB点,同时在这点还产生了-180°的相位移。在奈奎斯特分析中,T(s)的虚部和实部相对频率绘制点对应坐标为-1,j0。下图3.2,显示了这两种分析方法中环路满足振荡的条件。
如果系统的工作点稍微偏移一些,例如:温度、增益、阻抗、输入输出扰动等,各方面的变化,使得系统进入振荡区域,输出信号将会指数的减小或增大到上/下限的功率范围。所以为了使闭环系统更稳定,设计师应该努力加大增益/相位余量,使系统在各种工作条件下都能避免进入振荡状态。
2、稳定性标准
应该理解我们是要构建稳定的控制系统而不是振荡器,同时还要满足控制系统应有的调整速度、精确度,无振荡,这些优秀性能。因此,我们需要远离不稳定和发散的系统。有一种办法是通过限制系统对某个频率范围产生的响应幅度。根据通俗的定义带宽是指信号从输入到闭环输出其幅度下降3dB,闭环系统的带宽通常看作在某个频率范围内,系统能根据输入得到令人满意的输出(能遵循控制规律,没有振荡发生)。正如我们稍后看到的,在设计开始阶段我们并不能直接控制闭环带宽,但是穿越频率Fc(crossover frequency)是跟开环参数紧密相关的。
我们已经看到开环增益在控制系统中代表了一个重要的参数,当开环增益大于1时,系统能以动态方式工作,闭环系统能补偿外界的扰动或使输出量跟随参考设定值变化。但是现实中的控制系统会存在限制:系统必需能在扰动信号频率处提供合适的增益,如果扰动或参考设定值变化的太快,扰动信号的频率超出了系统的闭环带宽范围,这意味着在这些频率处不存在增益。从系统的表现来看:系统将变化缓慢,而且不能响应扰动信号。
那么,对于实际的闭环系统来讲,能否设计成一个有着无限高的带宽?答案当然是不可能,因为开环增益带宽增大,就像增加了排水渠的直径。你肯定能收集到更多的信息和对扰动信号响应更快,但是系统也将接收更多的噪音和杂散信号。所以在实际应用中,应该合理的选择实际应用所需要的带宽范围,使用太高的带宽将不利于系统的抗干扰性和较低的鲁棒性。简而言之一句话:开关电源闭环带宽选择时,如果1KHz能满足规格需要,就不要去选择2KHz。高带宽带来的好处,说不定还带来更多的坏处。
那么我们如何选择闭环控制系统的带宽?通过观察开环增益T(s)的Bode图,当环路增益T(s)通过0dB点,这个的频率被称为穿越频率也被标记为Fc,为了获得稳定的闭环系统我们还需要另外一个重要的参数,即T(s)的相位移。前文已经讲到,环路增益为1(0dB),同时相位移-180°时系统就会进入不稳定。通过前文的分析,我们得知了在穿越频率处,环路的相位哪怕只滞后-178°,系统也能缓慢趋于稳定(仅仅动态效应很差而已)。所以,对于实际的应用来说,我们必须确保环路增益在穿越频率Fc处的相位滞后远小于-180°。
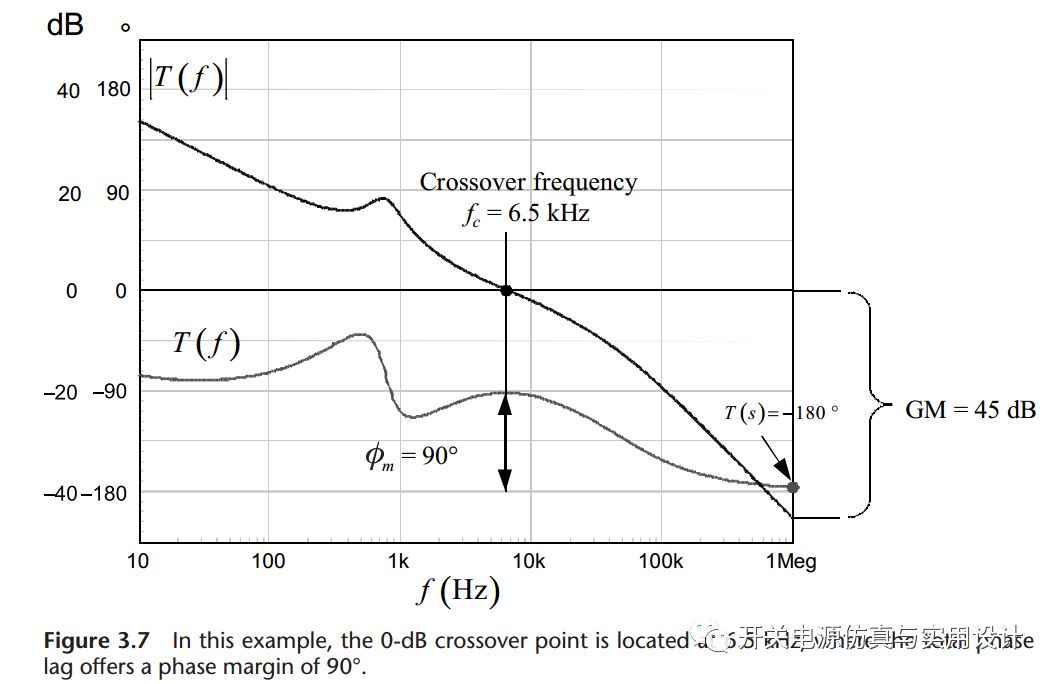
所以,通过补偿器G(s)可以在选定的穿越频率Fc处,对环路增益T(s)的相位移和增益进行补偿,从而得到在穿越频率Fc处所需的相位余量 (phase margin),通常是用来提升相位减少相位滞后,加大与-180°的距离)。在教科书中相位余量PM >= 45°,被认为是安全的设计,在一般情况下可以保证系统对外部扰动不会进入危险之中。正如我们在后面所看到的,相位余量PM也会影响闭环系统的动态响应。因此,相位余量的选择不仅仅只是考虑系统的稳定性,还需要考虑实际应用中所需要的瞬态响应。典型的环路补偿曲线由图3.7所示,显示了Fc = 6.5KHz,在这一点T(s)的相位是-90°。该Bode图显示了这个闭环系统的Fc = 6.5KHz,PM = (180 - 90)° = 90°。可以说这是一个非常稳定的系统,教科书把这种称为条件稳定(Conditional Stability)。
3、增益余量和条件稳定
图3.8显示了开环增益T(s)的另一种典型的频率响应,高亮了在0dB穿越频率处的不同相位余量PM。经验表明构成电源变换器的元器件(电解电容器)其生命周期都会产生不同的电性能的偏移或变化。同时变换器的工作温度也会对元器件的参数产生一定的影响,这些变化着的参数上下偏移会使得环路增益T(s)的产生偏移,也就可以看到类似图3.8所展示的不同穿越频率变化(不过这个变化有点夸张,仅仅用来做理论分析)。如果某项参数偏移使得穿越频率向右移动,就会使得相位余量PM变小,此时变换器的瞬态响应可能会达到不规格要求。作为设计师有责任确保这些参数的增益偏移不会发生在相位移到-180°附近,这将会导致系统进入振荡状态。
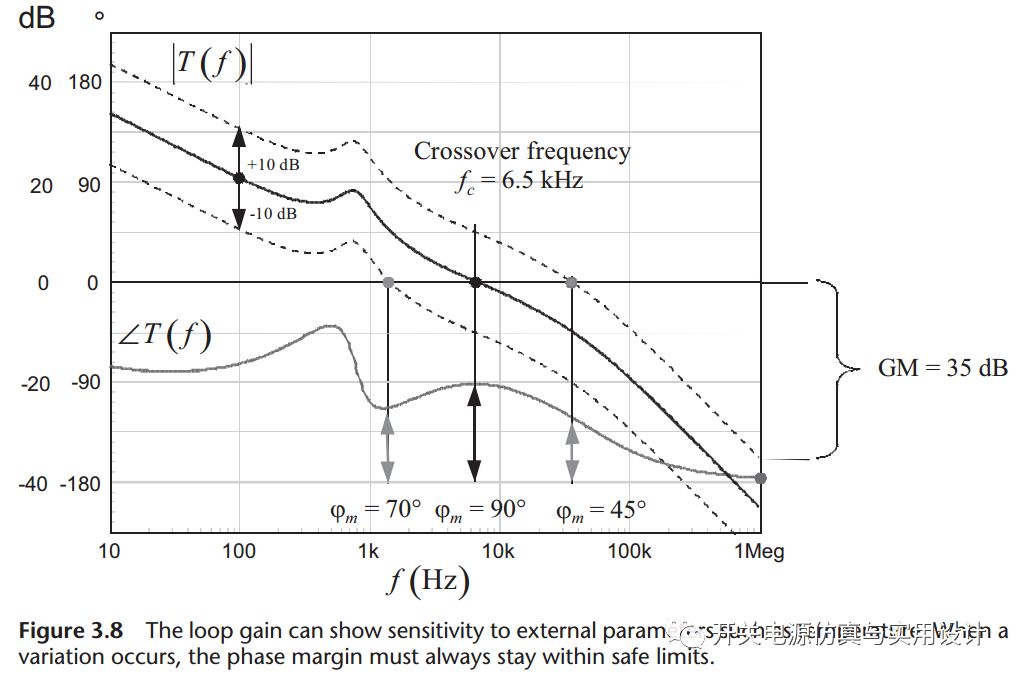
从上图可以看到因为参数的偏移,导致环路增益T(s)产生了正负10dB的变化,使得穿越频率从1.5K~30KHz变化。在这个区域内,相位余量从70下降到45°。根据控制理论,此系统仍然是条件稳定。如果非要说这个系统在哪里有最恶劣的情况,应该是在1MHZ处相位滞后达到-180°,而增益却只有-35dB。如果,有某个条件让环路增益在1MHz处提升了35dB,那么这个系统将会进入不稳定状态。不过幸运的是,现代电力电子系统中是不可能一下子发生一个35dB的增益提升的,特别是在1MHZ这样的高频区域。通过上文,我们就能了解到除了相位余量PM之外,另一个衡量系统稳定性的参数增益余量(Gain Margin),它描述的是当环路增益相位移达到-180°,增益与0dB的距离。目的是防止因为元器件参数的偏移,在相位-180°点上,增益达到0dB达成振荡的条件。
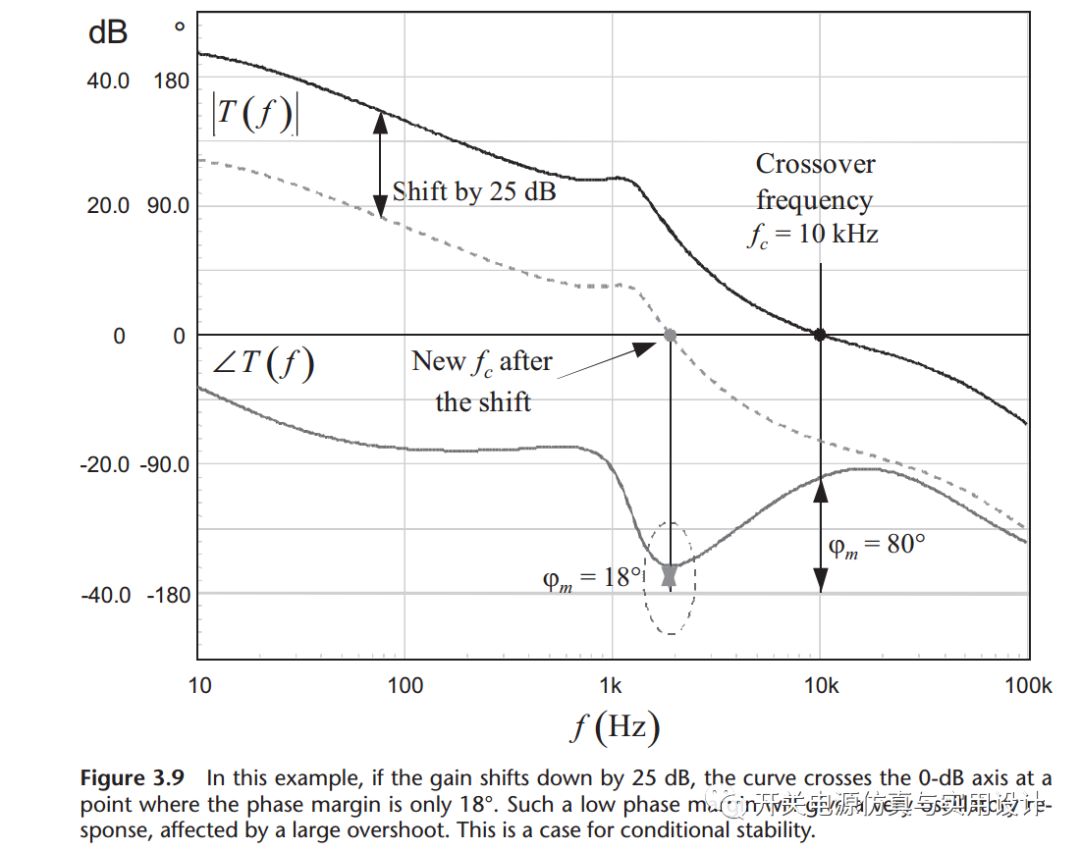
环路增益偏移的另外一个例子可见图3.9所示,这是一个在Fc =10KHz // PM = 80°的闭环系统。基于之前的讨论,我们知道增益曲线可能发生上下的偏移。在这个例子中显示了另外一种可能发生的极端情况:如果环路增益下降到穿越频率为2KHz处,此时相位余量PM仅仅为18°,此时的闭环系统已经非常接近不稳定了。 但是幸运的是-25dB的增益减小也是不太可能会发生的。但是在实际设计中,应该要考虑到种种极端发生的可能性。
图3.9:
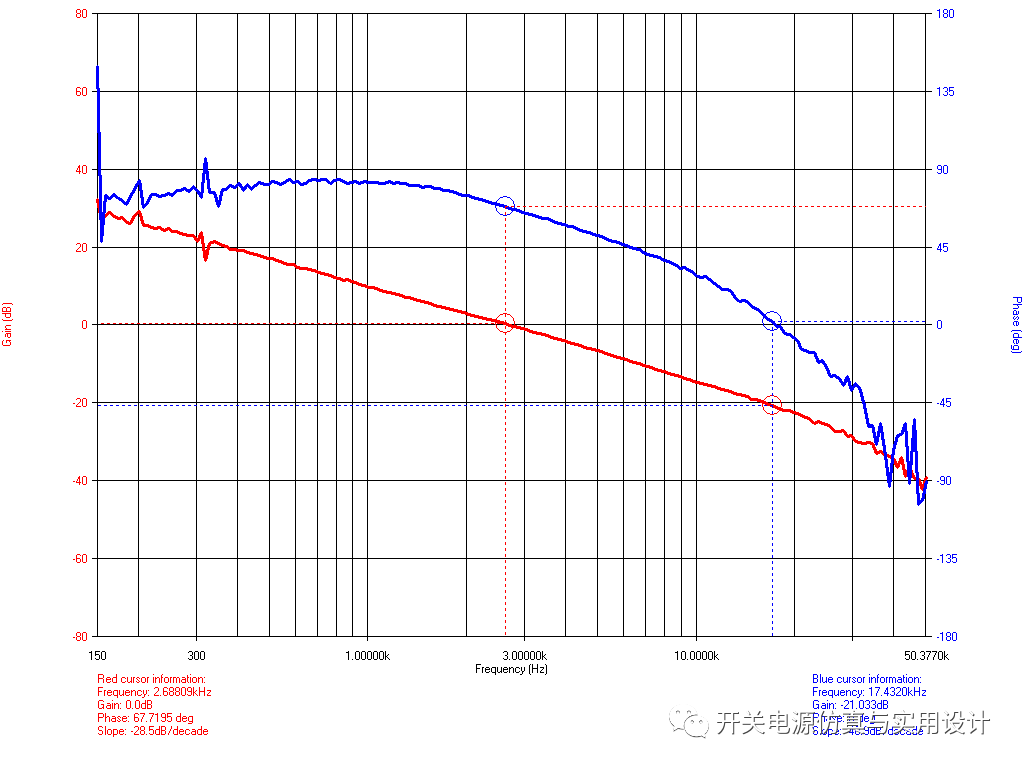
我(杨帅锅)在一些项目的规格要求中看到,有客户会明确指出要求在额定工作点出处,穿越频率Fc点,相位余量PM应该大于60°。对于这种要求,就应该设计好补偿器G(s)来实现对变换器功率级H(s)的补偿,在穿越频率之前的相位移都应有较大幅度的提升,在穿越频率处有足够的相位余量。最好能达到下图这样的效果,下图这是一个实际的项目测试的BODE图:(峰值电流模式控制的正激变换器)
参考文档:
1、 CHRISTOPHE BASSO Designing Control Loops for Linear and Switching Power Supplies 2012
2、Basso, C., Switch Mode Power Supplies: SPICE Simulations and Practical Designs, New York: McGraw-Hill, 2008
3、Peretz, M. M., and S. Ben-Yaakov, “Revisiting the Closed Loop Response of PWM Converters Controlled by Voltage Feedback,” APEC 2008, Austin, TX.
4、Adar, D., and S. Ben-Yaakov, “Generic Average Modeling and Simulations of Discrete Controller,” APEC 2001, Anaheim, CA.
5、Özbay, H., Feedback Control Theory, Boca Raton, FL: CRC Press, 2000.
本文源自微信公众号:开关电源仿真与实用设计,不代表用户或本站观点,如有侵权,请联系nick.zong@aspencore.com 删除!
 0
0







