
在上一篇推文 中我以速度环为例说了前馈的作用。
本文继续关注一下加速度环的前馈。
两个病证
-
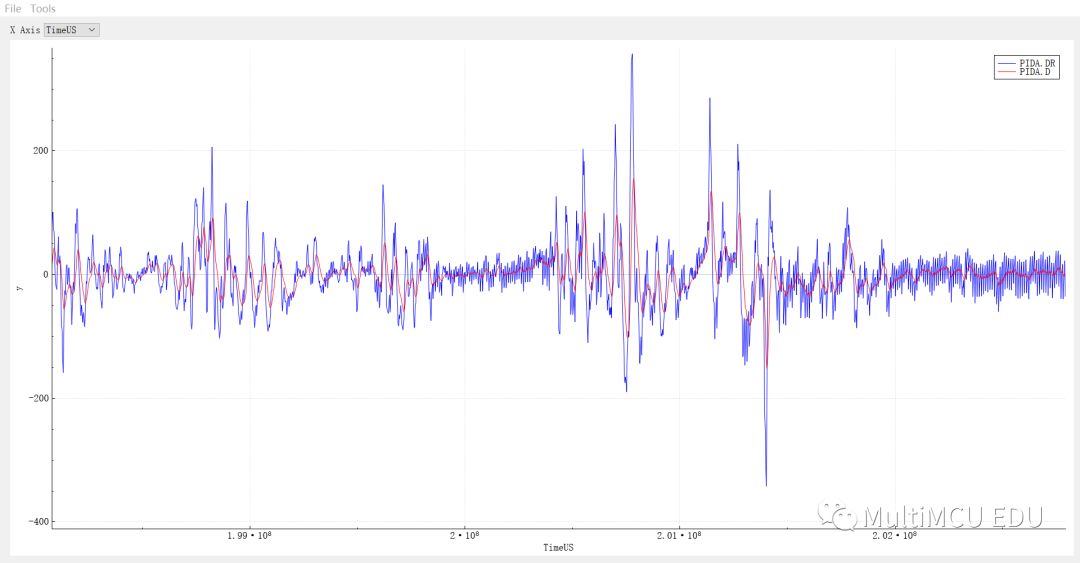
病证一:前馈太疯狂
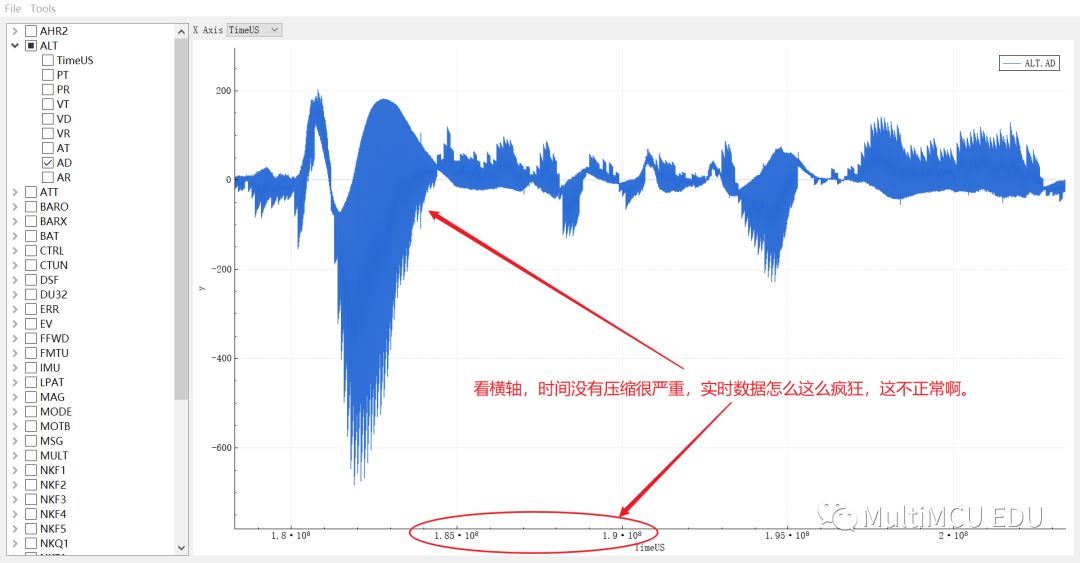
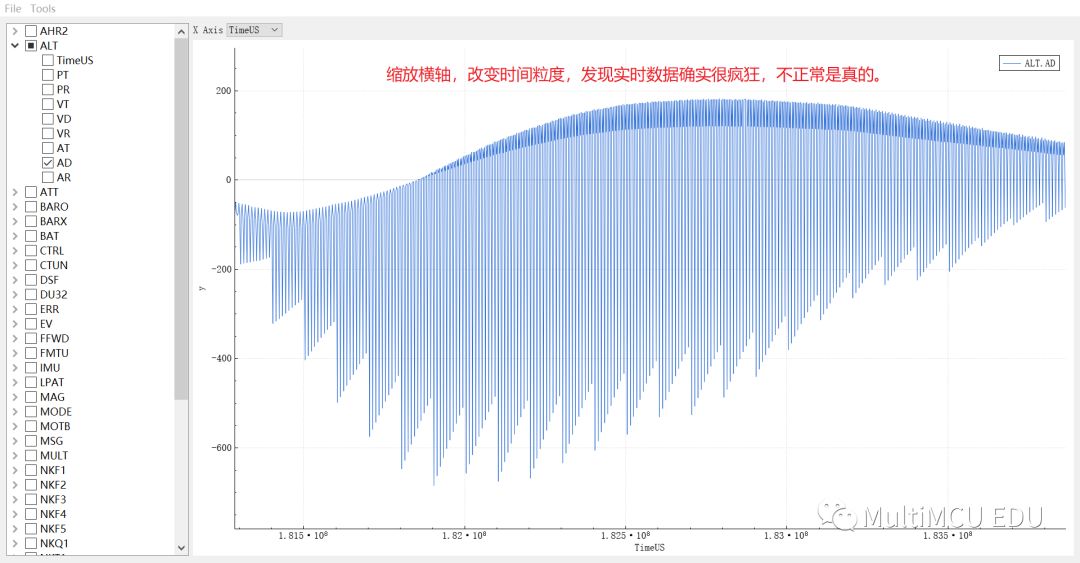
-
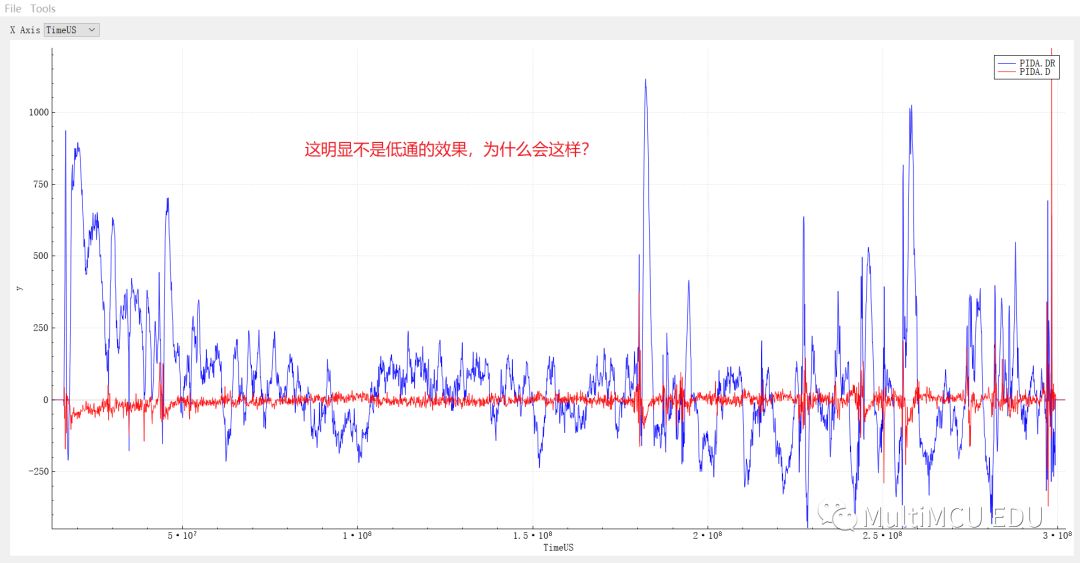
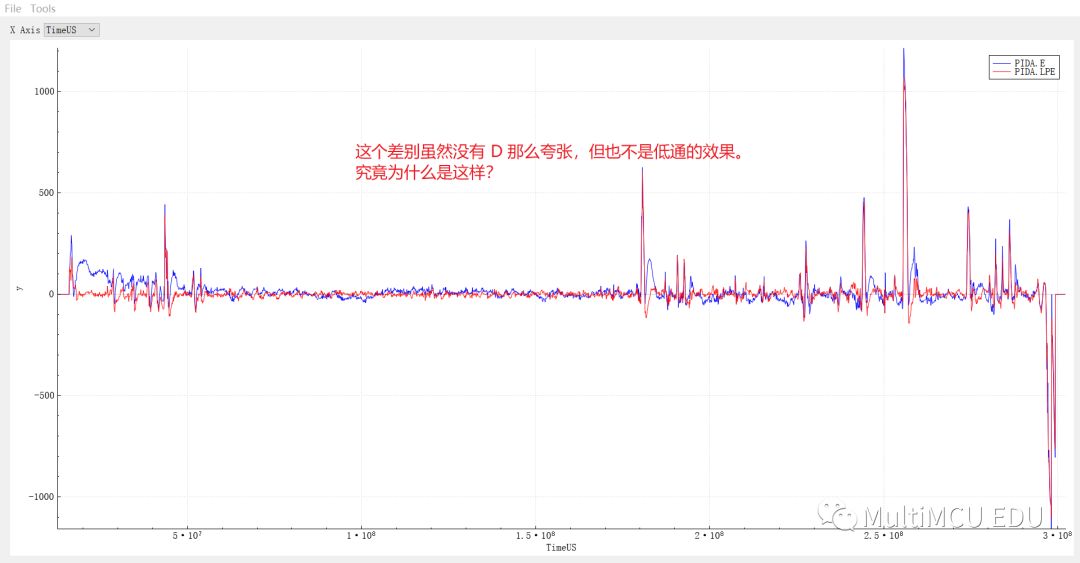
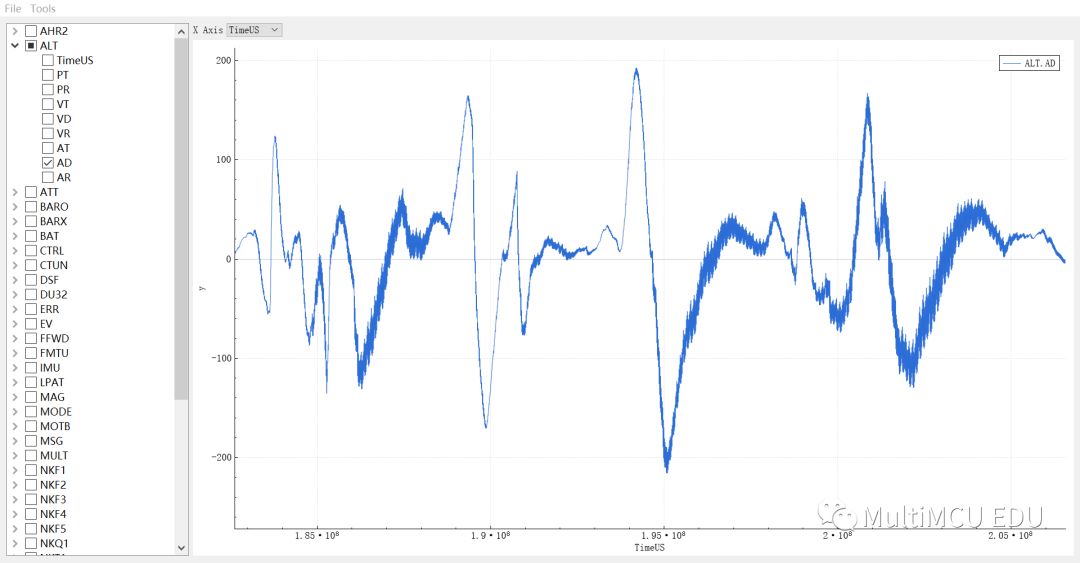
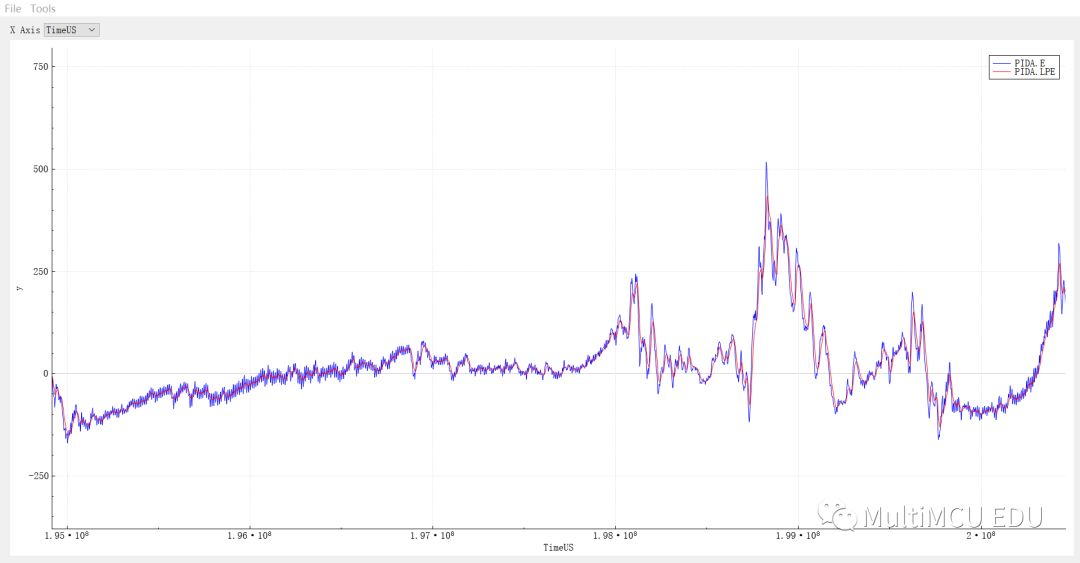
病证二:低通效果跑偏
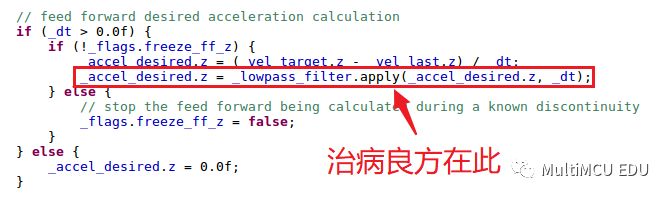
在 一文中我们知道高度控制在加速度环上有两个低通滤波器。
对证下药
-
第一服良药:速效止疯丸。
关于数据如何导入 MATLAB 请看 ArduPilot 开源说明。(公从号内回复 ardupilotlog 得到 github 开源地址)
这里展示一下 MATLAB 的强大助力。
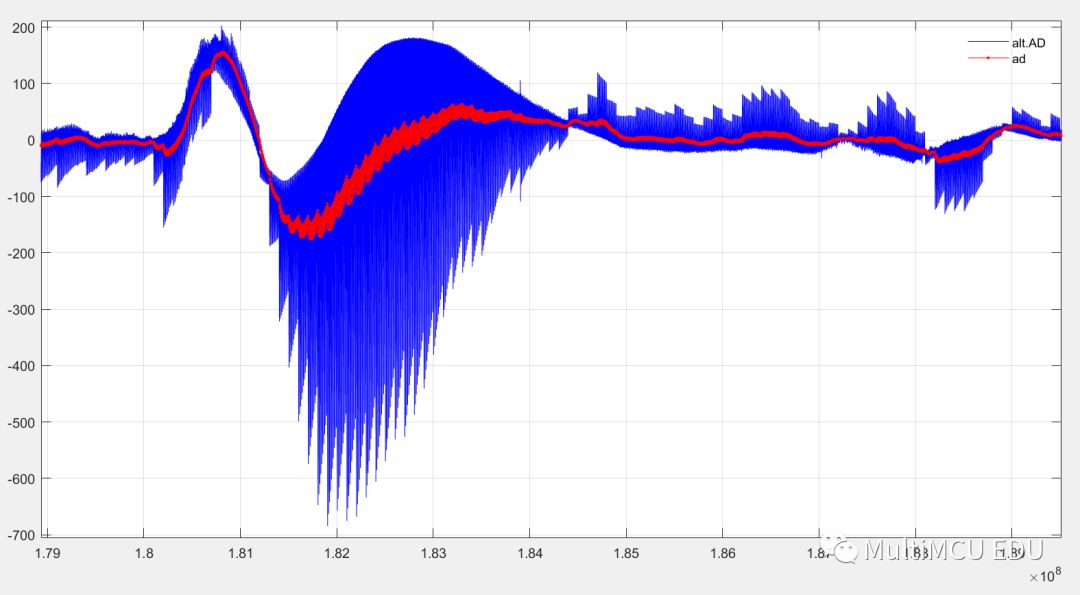
治愈后的效果如下
-
第二服良药:醒脑明目汤。
理论基础请读者自行搜索关键词:香农采样定理。
这个错误就像是一名大夫抓着 A 病人的脉,看着 B 病人的脸,一脑子问号:这脉象跟面象对不上啊。。。
大夫太累了,赶紧服一剂“醒脑明目汤”定定神就好了。
充分展现“记录全部数据”的重要性。 -
翠花,上汤

-
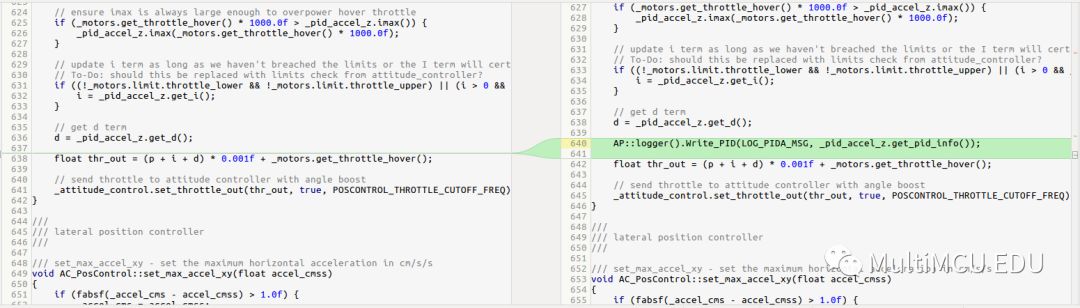
药效立杆见影
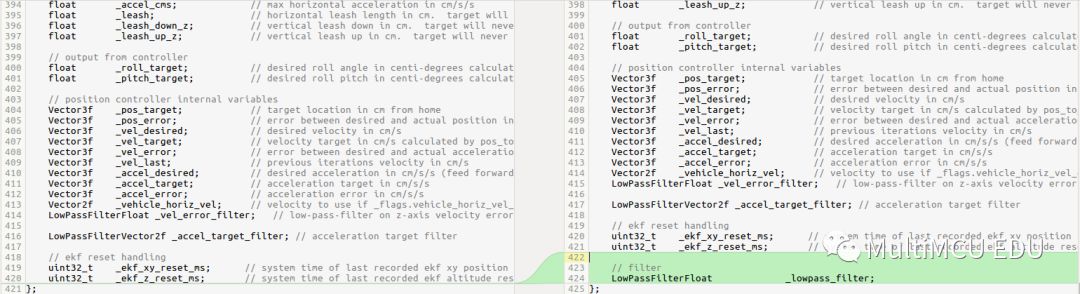
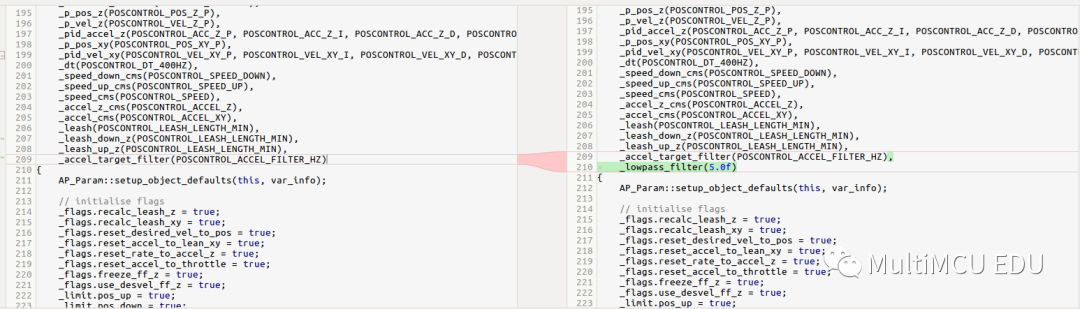
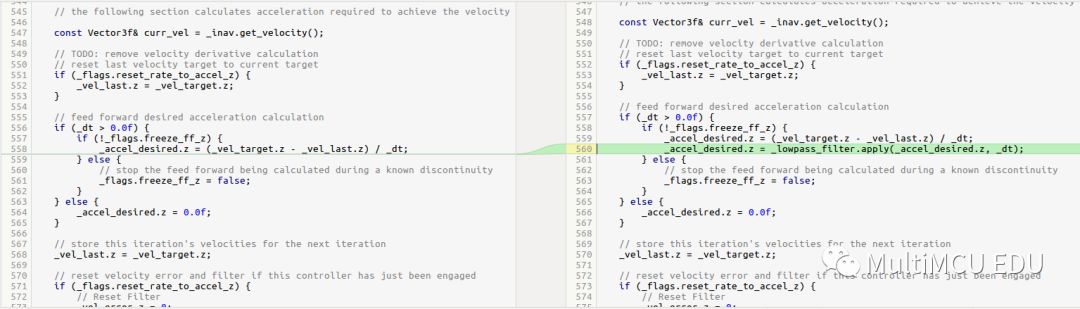
本文代码修正截图
PS
昨晚在小伟哥的群里说过今天发个推文说说 ardupilot 原有日志的问题,承诺已兑现。
-
ArduPilot 原有日志中不符合采样定理的地方很少很少,我算是凑巧找到一个。不要因为本文对 ArduPilot 原有日志失去信心。
-
ArduPilot 代码构架清晰到想加一条自定义日志一句话就搞定,非常提倡在研究具体问题的时候按照自己需求加自定义日志。按需分析,解决问题。
-
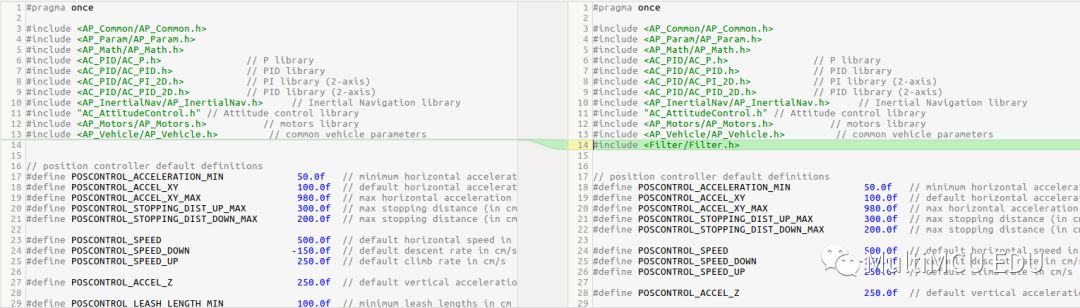
本文的代码截图较为全面,读者可以自己动动手按图修改试一试。
本文源自微信公众号:MultiMCU EDU,不代表用户或本站观点,如有侵权,请联系nick.zong@aspencore.com 删除!
 0
0







