
MIT便携式雷达项目中使用距离和多普勒(方向)来探测物体。但是如何用电磁波来探测物体呢?有很多不同的方法来实现这个雷达。比较常见的包括单脉冲雷达、双基地雷达、多普勒雷达、FMCW调频连续波雷达。前面说过,这个雷达使用了FMCW来探测物体距离和方向。
 图12 发射和接收天线 图12展示了本雷达系统的一个简化版的天线设计。包含2个咖啡罐天线,一个作为接收机,另一个作为发射机。雷达发射机在同轴电缆上发出一个时变的微波信号发往发射天线。时变信号会感应出电流并产生电磁辐射。微波能量会以光速前进并从物体上反射回来。反射的能量会使接收天线获得能量,并感应出电流,最终送到雷达接收机。图13展示了这一过程的基本概念。
图12 发射和接收天线 图12展示了本雷达系统的一个简化版的天线设计。包含2个咖啡罐天线,一个作为接收机,另一个作为发射机。雷达发射机在同轴电缆上发出一个时变的微波信号发往发射天线。时变信号会感应出电流并产生电磁辐射。微波能量会以光速前进并从物体上反射回来。反射的能量会使接收天线获得能量,并感应出电流,最终送到雷达接收机。图13展示了这一过程的基本概念。
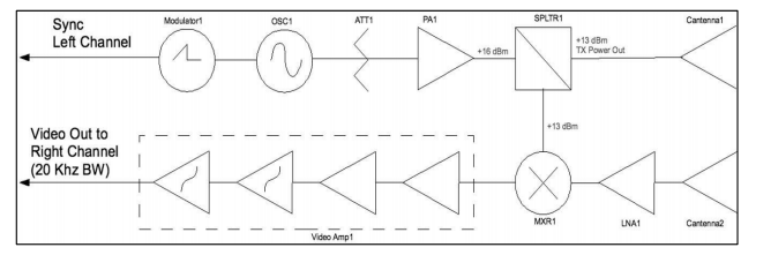 图13 雷达模块框图 雷达系统从调制器1开始。调制器1就是产生信号的电路。它使用XR2206芯片来生成高质量的正弦波、方波、三角波、斜波和脉冲波形。这块芯片很适合生成我们要的FMCW信号。因为FMCW雷达可以用这四种波形中的任意一个来作为扫描信号。但是对于这个应用,我们会用三角波,因为它会提供更好的测距和测速能力。调制器1在系统中实现了2个功能。
图13 雷达模块框图 雷达系统从调制器1开始。调制器1就是产生信号的电路。它使用XR2206芯片来生成高质量的正弦波、方波、三角波、斜波和脉冲波形。这块芯片很适合生成我们要的FMCW信号。因为FMCW雷达可以用这四种波形中的任意一个来作为扫描信号。但是对于这个应用,我们会用三角波,因为它会提供更好的测距和测速能力。调制器1在系统中实现了2个功能。
第一,它给OSC1振荡器提供了一个线性斜波,也称作Vtune。这个Vtune电压与我们发射的频率(2.4~2.45GHz)成比例。调制器1 的线性斜波会使得OSC1产生一个线性的FM chirp信号,这个信号就是要发射和接收的信号。斜波和三角波的周期分别是20ms和40ms。斜波的大小也确定了。我们会用电位器产生一个100MHz带宽的信号。
第二,调制器1还生成了一个脉冲给我们的数据采集模块,并且还把这个脉冲发给了电脑,用于在电脑上更新GUI和计算FFT。调制器1的信号与线性斜波同步。图14展示了调制器1 的原理图和焊接照片。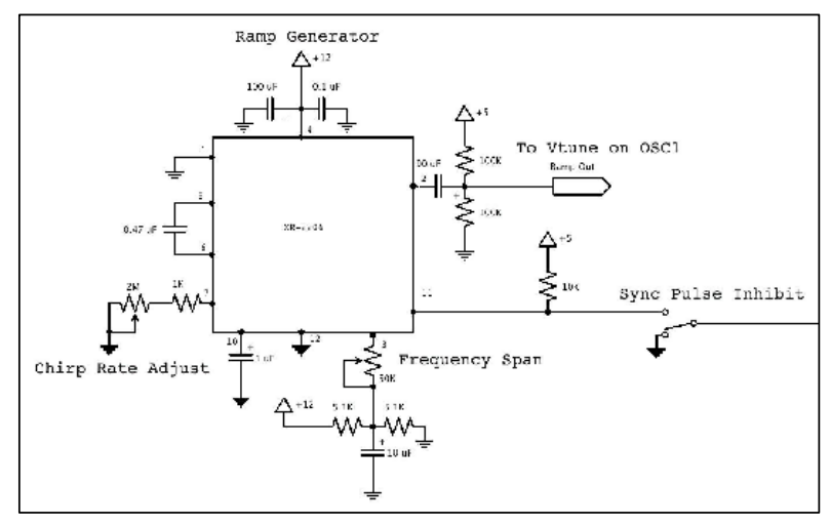
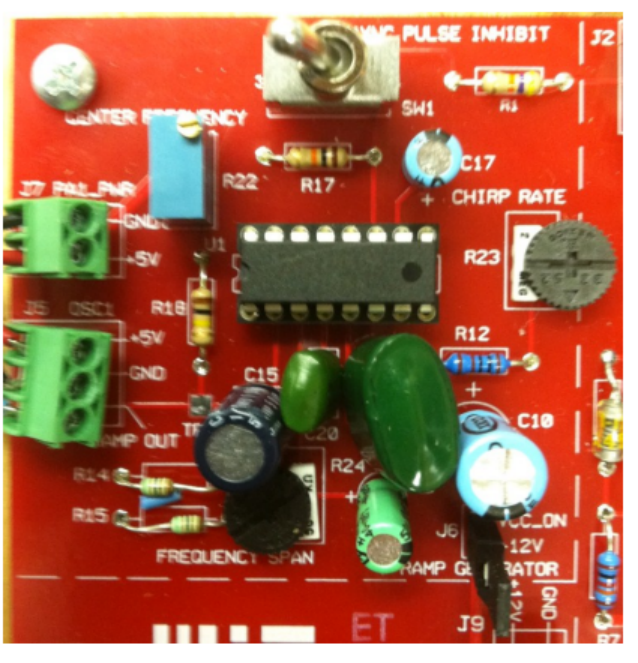 图14 生成FMCW信号 发射信号照射到物体后,接收机会收到反射的信号,这个信号会送入运算放大器电路,这个电路会放大信号。图15展示了我们的视频放大器。这个信号会进入运算放大器电路的增益级,强度提升28dB。放大器电路的输出会输送到4阶低通滤波器上。
图14 生成FMCW信号 发射信号照射到物体后,接收机会收到反射的信号,这个信号会送入运算放大器电路,这个电路会放大信号。图15展示了我们的视频放大器。这个信号会进入运算放大器电路的增益级,强度提升28dB。放大器电路的输出会输送到4阶低通滤波器上。
低通滤波器时Sallen-Kelly LPF。这种滤波器很好实现,并且不会像无源滤波器一样造成损耗。经过增益和滤波,输出会送到数据采集部分,然后在电脑上进行处理和显示。MAX414 4通道运算放大器和单独的电源供电就能实现我们的要求,这个芯片的好处在于可以用有源运放实现增益级和低通滤波部分。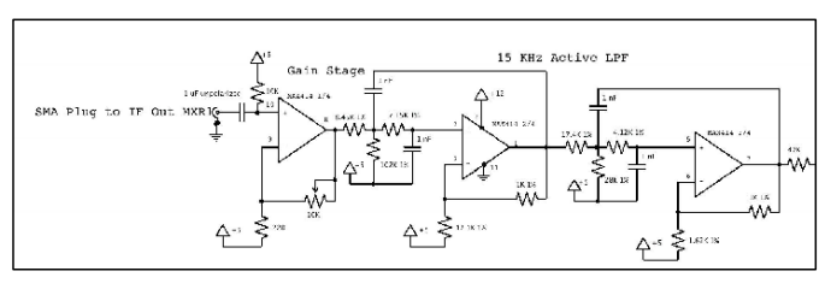
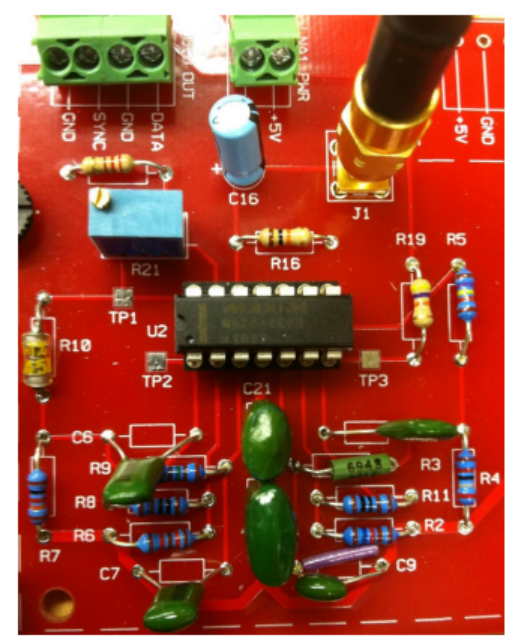 图15 视频放大器
图15 视频放大器
最后,需要供电部分。两组电池,各有4节5号电池,可以产生6v和12v供电。然而,在我们的电路中需要的是12v 10v和5v三种电压。我们用2个稳压器来解决这个问题,如图16。射频器件都用5v低压降稳压器来供电,这个稳压器由6V电压来供电。10v的直流输出可以给MAX414芯片供电,12v电压直接用于FMCW电路供电。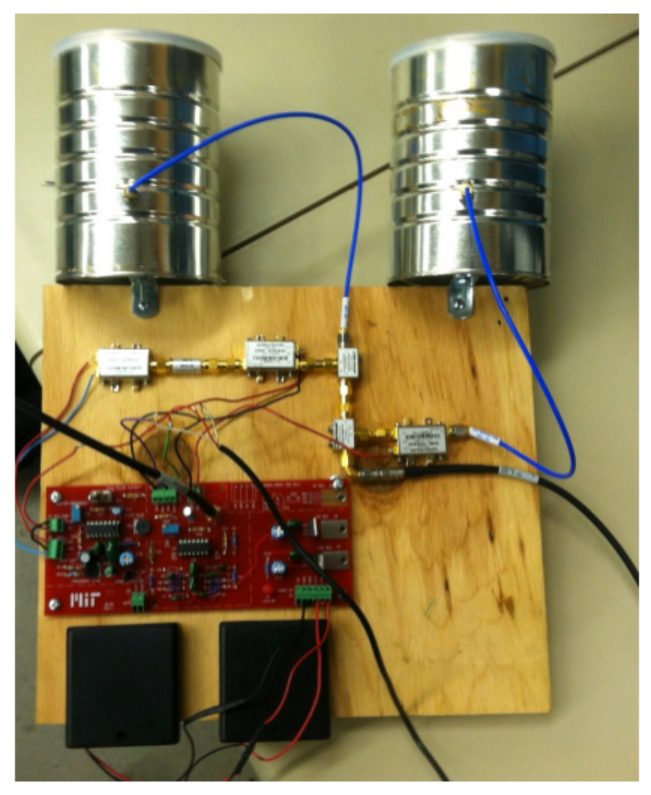 图17 完整的雷达系统
图17 完整的雷达系统
图17是完整雷达系统的照片。所有的组件都焊接到了一个PCB上,这样系统更加牢固,可以长久久保存。

图12 发射和接收天线 图12展示了本雷达系统的一个简化版的天线设计。包含2个咖啡罐天线,一个作为接收机,另一个作为发射机。雷达发射机在同轴电缆上发出一个时变的微波信号发往发射天线。时变信号会感应出电流并产生电磁辐射。微波能量会以光速前进并从物体上反射回来。反射的能量会使接收天线获得能量,并感应出电流,最终送到雷达接收机。图13展示了这一过程的基本概念。 图13 雷达模块框图 雷达系统从调制器1开始。调制器1就是产生信号的电路。它使用XR2206芯片来生成高质量的正弦波、方波、三角波、斜波和脉冲波形。这块芯片很适合生成我们要的FMCW信号。因为FMCW雷达可以用这四种波形中的任意一个来作为扫描信号。但是对于这个应用,我们会用三角波,因为它会提供更好的测距和测速能力。调制器1在系统中实现了2个功能。 第一,它给OSC1振荡器提供了一个线性斜波,也称作Vtune。这个Vtune电压与我们发射的频率(2.4~2.45GHz)成比例。调制器1 的线性斜波会使得OSC1产生一个线性的FM chirp信号,这个信号就是要发射和接收的信号。斜波和三角波的周期分别是20ms和40ms。斜波的大小也确定了。我们会用电位器产生一个100MHz带宽的信号。
第二,调制器1还生成了一个脉冲给我们的数据采集模块,并且还把这个脉冲发给了电脑,用于在电脑上更新GUI和计算FFT。调制器1的信号与线性斜波同步。图14展示了调制器1 的原理图和焊接照片。
图14 生成FMCW信号 发射信号照射到物体后,接收机会收到反射的信号,这个信号会送入运算放大器电路,这个电路会放大信号。图15展示了我们的视频放大器。这个信号会进入运算放大器电路的增益级,强度提升28dB。放大器电路的输出会输送到4阶低通滤波器上。 低通滤波器时Sallen-Kelly LPF。这种滤波器很好实现,并且不会像无源滤波器一样造成损耗。经过增益和滤波,输出会送到数据采集部分,然后在电脑上进行处理和显示。MAX414 4通道运算放大器和单独的电源供电就能实现我们的要求,这个芯片的好处在于可以用有源运放实现增益级和低通滤波部分。
图15 视频放大器 最后,需要供电部分。两组电池,各有4节5号电池,可以产生6v和12v供电。然而,在我们的电路中需要的是12v 10v和5v三种电压。我们用2个稳压器来解决这个问题,如图16。射频器件都用5v低压降稳压器来供电,这个稳压器由6V电压来供电。10v的直流输出可以给MAX414芯片供电,12v电压直接用于FMCW电路供电。
图17 完整的雷达系统 图17是完整雷达系统的照片。所有的组件都焊接到了一个PCB上,这样系统更加牢固,可以长久久保存。
本文源自微信公众号:雷达通信电子战,不代表用户或本站观点,如有侵权,请联系nick.zong@aspencore.com 删除!
 0
0









