
一、WWDG 简介
窗口看门狗通常被用来监测由外部干扰或不可预见的逻辑条件造成的应用程序背离正常的运行序列而产生的软件故障。除非递减计数器的值在T6 位变成 0前被刷新,看门狗电路在达到预置的时间周期时,会产生一个MCU 复位。在递减计数器达到窗口寄存器数值之前,如果 7位的递减计数器数值(在控制寄存器中)被刷新,那么也将产生一个MCU 复位。这表明递减计数器需要在一个有限的时间窗口中被刷新。
二、WWDG 主要特征
• 可编程的自由运行递减计数器
• 条件复位
- 当递减计数器的值小于 0x40,(若看门狗被启动)则产生复位。
- 当递减计数器在窗口外被重新装载,(若看门狗被启动)则产生复位。
• 如果启动了看门狗并且允许中断,当递减计数器等于0x40 时产生早期唤醒中断(EWI),它可以被用于重装载计数器以避免WWDG 复位。
三、WWDG功能描述
如果看门狗被启动(WWDG_CR寄存器中的WDGA 位被置1),并且当 7位(T[6:0])递减计数器从0x40 翻转到0x3F(T6位清零)时,则产生一个复位。如果软件在计数器值大于窗口寄存器中的数值时重新装载计数器,将产生一个复位。
看门狗框图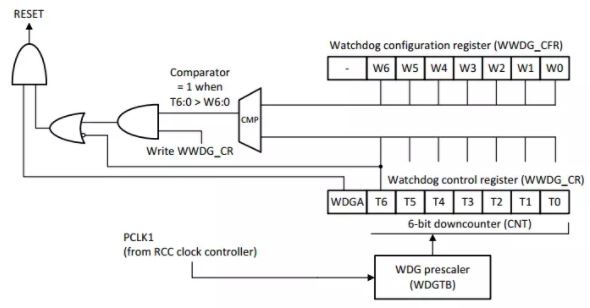
应用程序在正常运行过程中必须定期地写入WWDG_CR 寄存器以防止MCU 发生复位。只有当计数器值小于窗口寄存器的值时,才能进行写操作。储存在WWDG_CR 寄存器中的数值必须在0xFF 和0xC0 之间:
1、启动看门狗
在系统复位后,看门狗总是处于关闭状态,设置WWDG_CR 寄存器的WDGA 位能够开启看门狗,随后它不能再被关闭,除非发生复位。
2、控制递减计数器
递减计数器处于自由运行状态,即使看门狗被禁止,递减计数器仍继续递减计数。当看门狗被启用时,T6 位必须被设置1,以防止立即产生一个复位。
T[5:0]位包含了看门狗产生复位之前的计时数目;复位前的延时时间在一个最小值和一个最大值之间变化,这是因为写入WWDG_CR寄存器时,预分频值是未知的。
配置寄存器(WWDG_CFR)中包含窗口的上限值:要避免产生复位,递减计数器必须在其值小于窗口寄存器的数值并且大于0x3F 时被重新装载,上图描述了窗口寄存器的工作过程。
另一个重装载计数器的方法是利用早期唤醒中断(EWI)。设置WWDG_CFR 寄存器中的WEI 位开启该中断。当递减计数器到达0x40 时,则产生此中断,相应的中断服务程序(ISR)可以用来加载计数器以防止WWDG 复位。
在WWDG_SR 寄存器中写0可以清除该中断。注:T6 位可以被用来产生一个软件复位(WDGA 位被置位,T6 位清零)
四、如何编写看门狗超时程序
下图显示了装载到看门狗计数器(CNT)中的 6 位计数值和看门狗的延迟时间之间的线性关系(以 mS为单位)。此图可用来做为快速计算的参考,而未将时间的偏差考虑在内。如果需要更高的精度,可以使用下图提供的计算公式。
当写入 WWDG_CR 寄存器时,始终置 T6 位为1以避免立即产生一个复位。
窗口看门狗时序图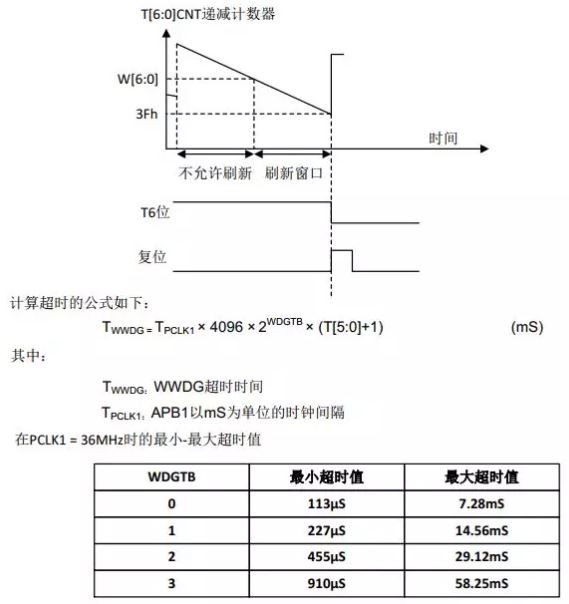
五、设置WWDG实验分析
• 实验内容简介
环境MM32L073PF Miniboard、MDK,设置WWDG,通过观察喂狗与不喂狗的复位现象。
• 实验代码分析
首先看main函数
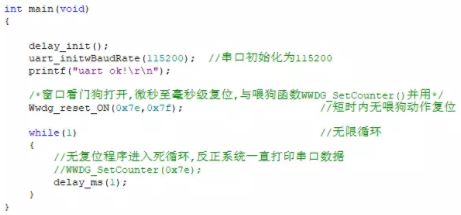
先初始化一个串口,方便我们观察复位现象,然后通过函数Wwdg_reset_ON 进行设置WWDG。最后在循环里通过WWDG_SetCounter函数不停的喂狗。
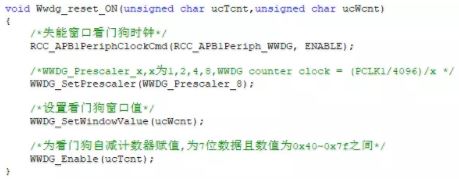
在函数Wwdg_reset_ON中设置窗口值,和计数器的初值。
• 实验现象
1、当注释掉喂狗函数时,通过串口在不断打印可以看出,MCU一直在复位。
2、当不注释喂狗函数时,串口只打印一次,MCU没有复位。
 0
0







