
下面以Linux的Ext2为例介绍文件系统的组成。
Ext2采用了分立式目录结构,即一个文件的目录分为目录项和索引节点两个部分。
Ext2的索引节点
在一个实际分立式目录的文件系统中,索引节点(inode)主要需要两部分内容来支持:一是inode结构;二是对于节点的操作函数。
Ext2的索引节点
Ext2的每个文件(或目录)都有唯一的i节点ext2_inode,它保存了一个文件所有与存储有关的属性。
Linux在文件include/linux/ext2_fs.h中定义的i节点结构ext2_inode如下:
struct ext2_inode {
__le16 i_mode; /* 文件模式 */
__le16 i_uid; /* 文件拥有者uid的低16位 */
__le32 i_size; /* 文件大小 */
__le32 i_atime; /* 最后访问时间 */
__le32 i_ctime; /* 创建时间 */
__le32 i_mtime; /* 修改时间 */
__le32 i_dtime; /* 删除时间 */
__le16 i_gid; /* 块组id的低16位 */
__le16 i_links_count; /* 链接计数,即文件别名的数目 */
__le32 i_blocks; /* 文件占用的存储块数 */
__le32 i_flags; /* 标志 */
union {
struct {
__le32 l_i_reserved1;
} linux1;
struct {
__le32 h_i_translator;
} hurd1;
struct {
__le32 m_i_reserved1;
} masix1;
} osd1; /* OS dependent 1 */
__le32 i_block[EXT2_N_BLOCKS];/* 文件索引表 */
__le32 i_generation; /* File version (for NFS) */
__le32 i_file_acl; /* File ACL */
__le32 i_dir_acl; /* Directory ACL */
__le32 i_faddr; /* 碎片地址 */
union {
struct {
__u8 l_i_frag; /* 碎片数目 */
__u8 l_i_fsize; /* 碎片大小 */
__u16 i_pad1;
__le16 l_i_uid_high; /* these 2 fields */
__le16 l_i_gid_high; /* were reserved2[0] */
__u32 l_i_reserved2;
} linux2;
struct {
__u8 h_i_frag; /* 碎片数目 */
__u8 h_i_fsize; /* 碎片大小 */
__le16 h_i_mode_high;
__le16 h_i_uid_high;
__le16 h_i_gid_high;
__le32 h_i_author;
} hurd2;
struct {
__u8 m_i_frag; /* 碎片数目 */
__u8 m_i_fsize; /* 碎片大小 */
__u16 m_pad1;
__u32 m_i_reserved2[2];
} masix2;
} osd2; /* 与操作系统相关的数据 */
};
其中,最重要的成员i_mode和指针i_block[]。i_mode指定文件类型;而指针数组i_block[]则是文件索引表。
i_block[]指针数组的示意图如下:
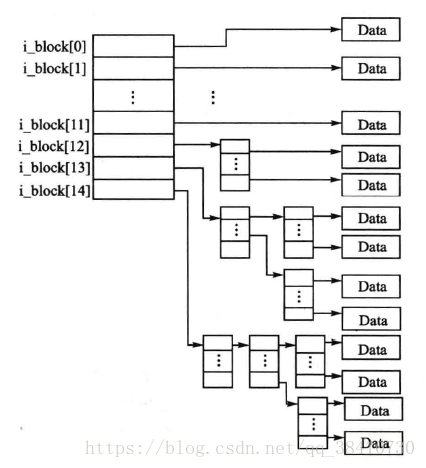
i_block[]共有15项,其中前12项为直接指向文件数据块的指针,后3项分别为采用多级索引结构的“一次间接指针”、“二次间接指针”和“三次间接指针”。其作用与内存管理中的多级页表类似,便于大型文件的存储处理。
也就是说:如果文件比较小,其数据块少于12个,其数据块索引就放在i_block[]的前12项中,如果文件比较大,超过12个数据块就需要分配间接块来保存数据块索引。
Ext2的i节点操作函数
为了对Ext2的i节点进行操作,系统还定义了Ext2文件i节点的操作函数集:
struct inode_operations ext2_file_inode_operations = {
.truncate = ext2_truncate,
#ifdef CONFIG_EXT2_FS_XATTR
.setxattr = generic_setxattr,
.getxattr = generic_getxattr,
.listxattr = ext2_listxattr,
.removexattr = generic_removexattr,
#endif
.setattr = ext2_setattr,
.permission = ext2_permission,
};
可以看到,这里操作集中没有熟悉的文件操作函数,这是因为这都是对磁盘文件的底层操作,文件还要再经一层乃至多层的封装才能变成我们所熟悉的函数。
Ext2的目录文件及目录项
Ext2的目录文件实质上是一个目录项列表,其中每一项都是一个ext2_dir_entry_2结构的数据。它所包含的主要信息:
- 目录项中文件名所对应的文件i节点号;
- 文件类型;
- 文件名称。
在文件include/linux/ext2_fs.h中定义的目录项结构ext2_dir_entry_2如下:
struct ext2_dir_entry_2 {
__le32 inode; /* 文件的i节点号 */
__le16 rec_len; /* 目录项的长度 */
__u8 name_len; /* 文件名的长度 */
__u8 file_type; //文件类型
char name[EXT2_NAME_LEN]; /* 文件名 */
};
结构中的域file_type描述文件类型。不同文件类型的取值用枚举定义如下:
enum {
EXT2_FT_UNKNOWN,
EXT2_FT_REG_FILE, //普通文件
EXT2_FT_DIR, //目录
EXT2_FT_CHRDEV, //字符设备文件
EXT2_FT_BLKDEV, //块设备文件
EXT2_FT_FIFO, //管道文件
EXT2_FT_SOCK, //Sock文件
EXT2_FT_SYMLINK,
EXT2_FT_MAX
};
按照通常的概念,目录文件应该是ext2_dir_entry_2类型的数组,但Ext2没有这样做。为了用户方便,结构ext2_dir_entry_2中的文件名是一个可以根据文件名的长度变化的数组,这种做法就使得各个目录项的长度并不相等,从而难以用数组来组成目录文件。所以Ext2的目录文件采用一个比较特殊的链表结构,如下图:
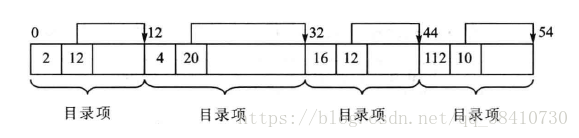
在这种结构中,目录项是连续存放的,而目录项的连接则通过结构ext2_dir_entry_2中的域rec_len来实现的,即程序通过rec_len作为偏移量来查找下一个目录项。
每个目录文件中的前两项为代表目录自身的“.”和代表其上一级目录(父目录)的“..”。
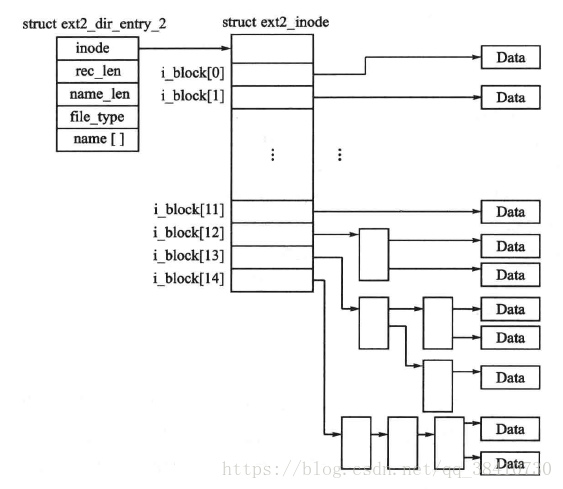
每当用户需要打开一个文件需要打开一个文件时,首先要指定待打开文件的路径和名称,文件系统会根据路径和名称搜索对应的目录项;然后用该目录项中的i节点号找到该文件的i节点;最后通过访问i节点结构中的i_block[]数据块来访问文件。
目录项、索引节点与文件数据块之间的关系如下所示:
Ext2在磁盘上的存储结构
Ext2文件系统把它所占用的磁盘空间分成若干个块组,如下所示:

每个块组的内部结构如下图所示:

每个块组中都有一个内容完全相同的块——超级块,这个块保存着Ext2整个文件系统的信息。在超级块的后面,依次排序有:用来描述本块组信息的块组描述符表、用来表示本组内存储块使用情况的存储块管理位图、用来记录本块组所有i节点被占用情况的i节点管理位图、本块组的i节点表以及用来存储各种文件的数据块五个部分。
Ext2的超级块
像一本书需要一个前言一样,文件系统也需要有个类似的说明部分,但它说明的是文件系统基本信息,目的是使文件系统的使用者(操作系统)可以了解文件系统的结构、类型等,这个说明部分叫做文件系统的超级块。不同的文件系统具有不同的超级块。系统管理员及系统可以利用超级块中的信息来对文件系统进行维护。
照理说,每个文件系统只要有一个超级块就够了,但Ext2为了保险起见,在每一个块组中都配置了一个超级块。在正常情况下,Ext2只使用第一个块组(块组0)中的超级块,而其他块组中的超级块只是一个备份。
在文件include/linux/ext2_fs.h中定义的超级块数据结构ext2_super_block如下:
struct ext2_super_block {
__le32 s_inodes_count; /* 文件系统中节点的总数 */
__le32 s_blocks_count; /* 文件系统中块的总数 */
__le32 s_r_blocks_count; /* 超级用户保留块的数目 */
__le32 s_free_blocks_count; /* 空闲块的总数目 */
__le32 s_free_inodes_count; /* 空闲索引节点总数 */
__le32 s_first_data_block; /* 第一个数据块 */
__le32 s_log_block_size; /* Block size */
__le32 s_log_frag_size; /* Fragment size */
__le32 s_blocks_per_group; /* 每个块组中的块数 */
__le32 s_frags_per_group; /* 每组中的片数 */
__le32 s_inodes_per_group; /* 每组中的节点数 */
__le32 s_mtime; /* 文件系统的安装时间 */
__le32 s_wtime; /* 对超级块写操作的左后时间 */
__le16 s_mnt_count; /* 文件系统的安装计数 */
__le16 s_max_mnt_count; /* 文件系统的最大安装数 */
__le16 s_magic; /* 幻数 */
__le16 s_state; /* 文件系统的状态 */
__le16 s_errors; /* Behaviour when detecting errors */
__le16 s_minor_rev_level; /* minor revision level */
__le32 s_lastcheck; /* time of last check */
__le32 s_checkinterval; /* max. time between checks */
__le32 s_creator_os; /* OS */
__le32 s_rev_level; /* Revision level */
__le16 s_def_resuid; /* Default uid for reserved blocks */
__le16 s_def_resgid; /* Default gid for reserved blocks */
__le32 s_first_ino; /* First non-reserved inode */
__le16 s_inode_size; /* size of inode structure */
__le16 s_block_group_nr; /* 本超级块所在的块组号 */
__le32 s_feature_compat; /* compatible feature set */
__le32 s_feature_incompat; /* incompatible feature set */
__le32 s_feature_ro_compat; /* readonly-compatible feature set */
__u8 s_uuid[16]; /* 卷的128位uuid */
char s_volume_name[16]; /* 卷名 */
char s_last_mounted[64]; /* directory where last mounted */
__le32 s_algorithm_usage_bitmap; /* For compression */
__u8 s_prealloc_blocks; /* Nr of blocks to try to preallocate*/
__u8 s_prealloc_dir_blocks; /* Nr to preallocate for dirs */
__u16 s_padding1;
__u8 s_journal_uuid[16]; /* uuid of journal superblock */
__u32 s_journal_inum; /* inode number of journal file */
__u32 s_journal_dev; /* device number of journal file */
__u32 s_last_orphan; /* start of list of inodes to delete */
__u32 s_hash_seed[4]; /* HTREE hash seed */
__u8 s_def_hash_version; /* Default hash version to use */
__u8 s_reserved_char_pad;
__u16 s_reserved_word_pad;
__le32 s_default_mount_opts;
__le32 s_first_meta_bg; /* First metablock block group */
__u32 s_reserved[190]; /* Padding to the end of the block */
};
由上述定义中可知,Ext2中的超级块中主要具有如下一些内容:
- 幻数。文件系统的一个标识,在安装文件系统时用于确认Ext2文件系统;
- 文件系统的版本号;
- 文件系统安装计数;
- 超级块所在的块组号;
- 数据块的大小;
- 块组中数据块的数目;
- 文件系统中空闲块的数目;
- 文件系统中空闲索引节点的数目;
- 文件系统中第一个索引节点的号码。
在Ext2文件系统中,第一个索引节点时根目录的入口。
块组描述符表
Ext2的一个块组可以看做文件系统空间的一个分区,与超级块的用途类似,为了向使用者提供块组的相关组织信息,每个块组有一个块组描述符表,其中主要提供块组的位图存放位置和i节点位图存放位置等信息。
Linux在文件include/linux/ext2_fs.h中定义的块组描述符表结构ext2_group_desc如下:
struct ext2_group_desc
{
__le32 bg_block_bitmap; /* 指向块组的块位图的指针 */
__le32 bg_inode_bitmap; /* 指向i节点位图的指针 */
__le32 bg_inode_table; /* i节点表的首地址 */
__le16 bg_free_blocks_count; /* 本组块空闲块的数目 */
__le16 bg_free_inodes_count; /* 本组块空闲i节点的数目 */
__le16 bg_used_dirs_count; /* 本组块分配给目录文件的i节点数目 */
__le16 bg_pad;
__le32 bg_reserved[3];
};
块组的块位图
Ext2文件系统用位图来记录块组中数据块的使用情况。数据块位图中的每一位表示该块组中每一个块的使用情况,如果为1,则表示该对应块已经被分配占用;如果为0,则表示该位还未被分配,是空闲块。
块组的i节点位图
Ext2文件系统用位图来记录块组中i节点使用情况。i节点位图中的每一位表示该块组中每一个i节点的使用情况,如果为1,则表示该结点已被分配占用;如果为0,则表示结点还未被分配,是空闲节点。
块组的i节点表
顾名思义,i节点表就是存放文件i节点的表格。每个块组中所有i节点都按i节点号的顺序存储在i节点表中。i节点表通常需要占用若干个数据块。
Ext2文件的用户操作函数集
作为一个为用户服务的文件系统,Ext2位用户提供的文件操作函数集如下:
const struct file_operations ext2_file_operations = {
.llseek = generic_file_llseek,
.read = do_sync_read,
.write = do_sync_write,
.aio_read = generic_file_aio_read,
.aio_write = generic_file_aio_write,
.unlocked_ioctl = ext2_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl = ext2_compat_ioctl,
#endif
.mmap = generic_file_mmap,
.open = generic_file_open,
.release = ext2_release_file,
.fsync = ext2_sync_file,
.splice_read = generic_file_splice_read,
.splice_write = generic_file_splice_write,
};
 0
0







