
RS-485是美国电子工业协会(EIA)在1983年批准了一个新的平衡传输标准(balanced transmission standard),EIA一开始将RS(Recommended Standard)做为标准的前缀,不过后来为了便于识别标准的来源,已将RS改为EIA/TIA。目前标准名称为TIA-485,但工程师及应用指南仍继续使用RS-485来称呼此标准。
RS-485仅是一个电气标准,描述了接口的物理层,像协议、时序、串行或并行数据以及链路全部由设计者或更高层协议定义。RS-485定义的是使用平衡(也称作差分)多点传输线的驱动器(driver)和接收器(receiver)的电气特性。
关键特性
-
差分传输增加噪声抗扰度,减少噪声辐射
-
长距离链路,最长可达4000英尺(约1219米)
-
数据速率高达10Mbps(40英寸内,约12.2米)
-
同一总线可以连接多个驱动器和接收器
-
宽共模范围允许驱动器和接收器之间存在地电位差异,允许最大共模电压-7-12V
信号电平
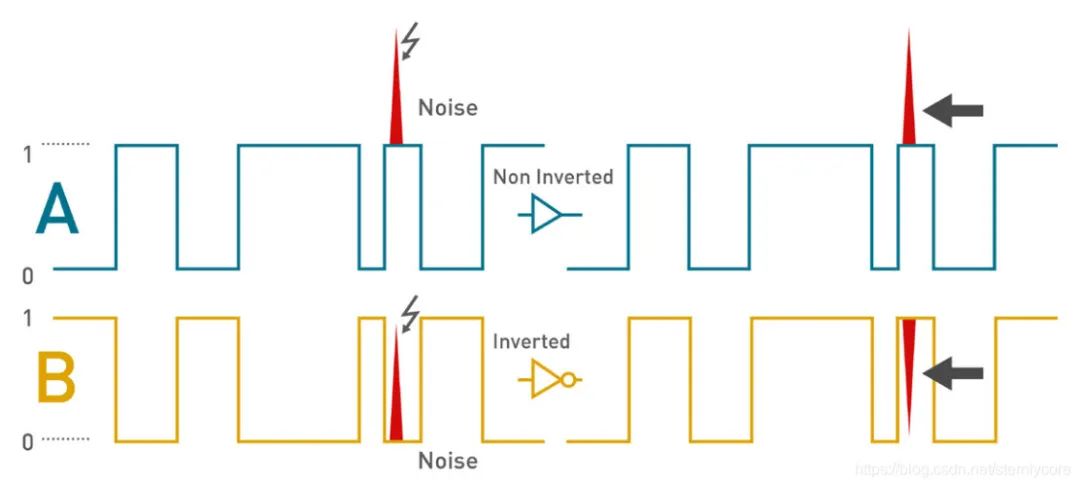
RS-485能够进行远距离传输主要得益于使用差分信号进行传输,当有噪声干扰时仍可以使用线路上两者差值进行判断,使传输数据不受噪声干扰:
RS-485差分线路包括以下2个信号:
-
A:非反向(non-inverting)信号
-
B:反向(inverting)信号
也可能会有第3个信号,为了平衡线路正常动作要求所有平衡线路上有一个共同参考点,称为SC或者G。该信号可以限制接收端收到的共模信号,收发器会以此信号作为基准值来测量AB线路上的电压。
RS-485标准中提到:
-
若是MARK(逻辑1),线路B信号电压比线路A高
-
若是SPACE(逻辑0),线路A信号电压比线路B高
注:不同的IC使用的信号标示方式不同,不过EIA的标准中只使用A和B的名称。数据为1时,信号B会比信号A要高。不过因为标准其中也提到信号A是“非反向信号”,信号B是“反向信号”。因此信号A、B的定义就更容易混淆了,许多组件制造商(错误的)依循了这个A/B的命名原则,所以具体定义需要实际参考设计厂家芯片手册。
为了不引起分歧,一种常用的命名方式是:
-
TX+ / RX+ 或D+来代替B(信号1时为高电平)
-
TX- / RX- 或D-来代替A(信号0时为低电平)
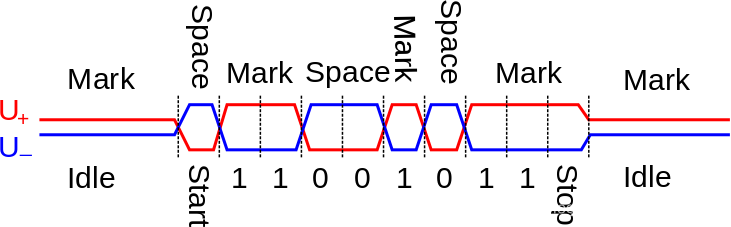
下图列出在RS-485利用“异步开始-停止”方式发送一个字符(0xD3,最低比特先发送)时,U+端子及 U−端子上的电压变化。
阈值电压
如果发射器输入端收到逻辑高电平(DI=1),则线路A电压高于线路B(VOA>VOB);
如果发射器输入端接收到逻辑低电平(DI=0),则线路B电压高于线路A(VOB>VOA)。
如果接收器的输入端线路A电压高于线路B(VIA-VIB>200mV),则接收器输出为逻辑高电平(RO=1);
如果接收器的输入端线路B电压高于线路A(VIB-VIA>200mV),则接收器输出逻辑低电平(RO=0)。
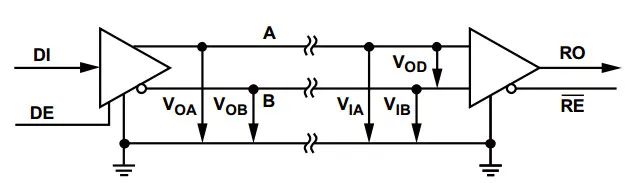
符合RS-485标准的驱动器能够提供不小于1.5V的差分输出(在54Ω负载下),符合RS-485标准的接收器能检测小到200mV的差分信号输入。即便是在线缆和连接器严重降级的情况下,这两个值仍能为高可靠性的数据传输提供充足的余量。

单位负载(UL)
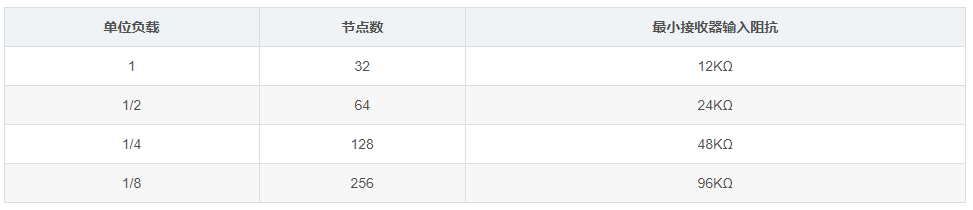
RS-485总线上的驱动器和接收器最大数量取决于它们的负载特性。驱动器和接收器的负载都是相对单位负载而衡量的。485标准规定一根传输总线上最多可以挂接32个单位负载。
单位负载定义为:在12V共模电压环境中,允许通过稳态负载1mA电流,或者是在-7V共模电压环境中,允许通过稳态负载0.8mA电流。将接收器输入阻抗看作12 kΩ并给收发器1mA电流,这可以代表一个单位负载。 部分RS-485接收器额定具有1/4或1/8UL,意味着可以挂载多数量的连接器。有关UL和接收器输入阻抗对应关系如下图所示:
工作模式
总线接口可以设计为如下两种方式:
-
半双工(Half-Duplex)RS-485
-
全双工(Full-Duplex)RS-485
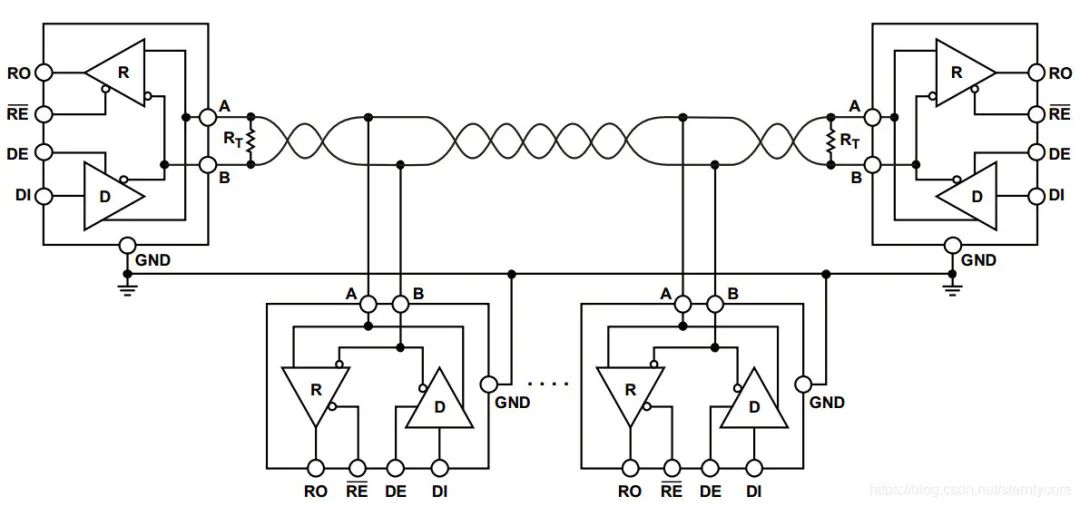
关于多个半双工总线配置如下图所示,一次只能在一个方向传输数据。
 关于全双工总线配置如下图所示,允许主从节点之间双向同时通信。
关于全双工总线配置如下图所示,允许主从节点之间双向同时通信。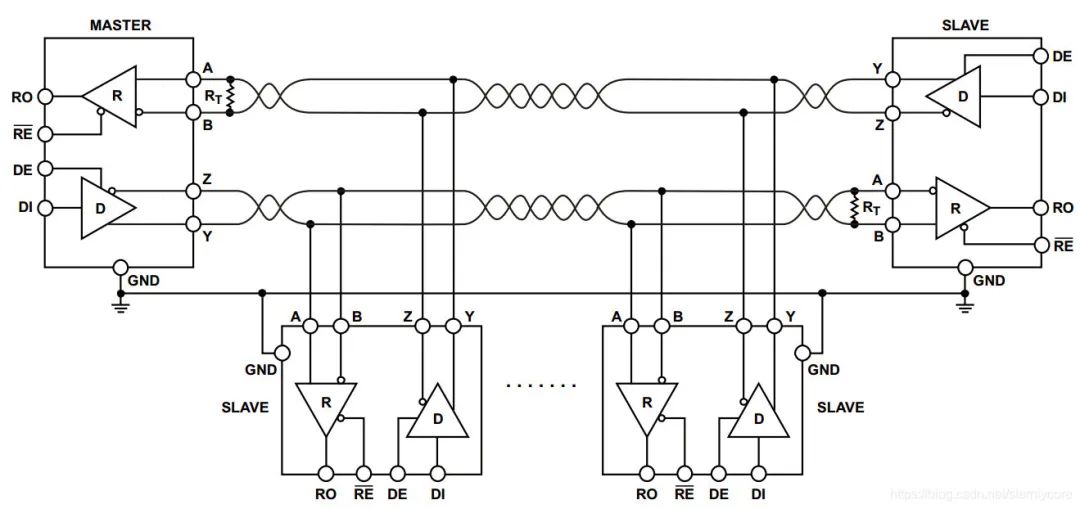
总线终端和分支长度
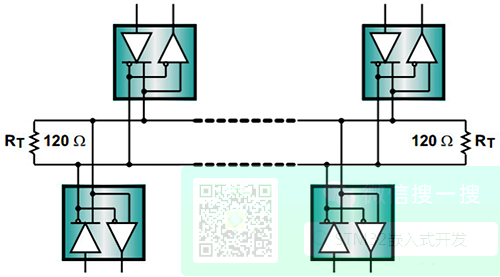
为避免信号反射,当线缆长度很长时数据传输线必须有终点,并且分支长度尽可能的短。正确的终端需要终端电阻RT匹配,其值为传输线的特性阻抗Z0。RS-485标准建议线缆的Z0=120Ω。电缆干线通常终端匹配120Ω的电阻,线缆的末尾处各一个。见下图示意:
分支的电气长度(收发器和电缆干线的导线距离)应小于驱动器上升沿时间的十分之一:
LStub ≤ tr * v * c/10
-
LStub= 最大分支长度(单位英尺)
-
tr= 驱动器(10/90)上升沿时间(单位ns)
-
v = 信号在电缆上传输的速率相对于光速的比率
-
c = 光速(9.8*10^8ft/s)
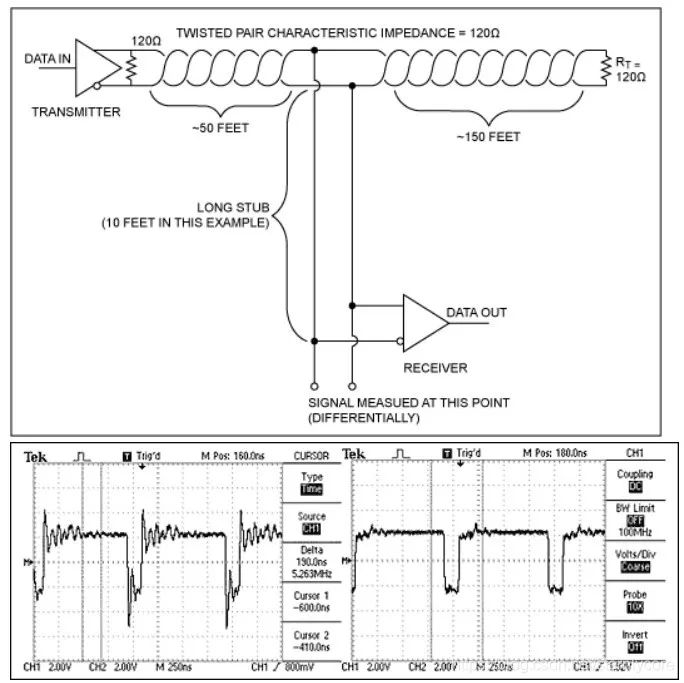
太长的分支长度会导致信号发射反射影响阻抗,下图是长分支长度与短分支长度波形对比。
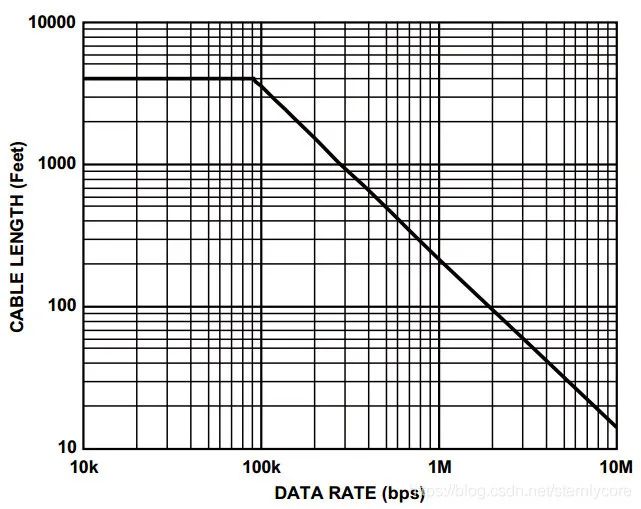
数据速率和电缆长度
使用高数据速率时,只能使用较短线缆。使用低数据速率时,可以使用较长的线缆。对应低速率应用,电缆的直流电阻通过在电缆压降增加了噪声裕量,限制了电缆长度。使用高速率应用时,电缆的交流效应限制了信号质量,限制电缆长度。下图提供了较为保守的电缆长度和数据速率变化曲线。
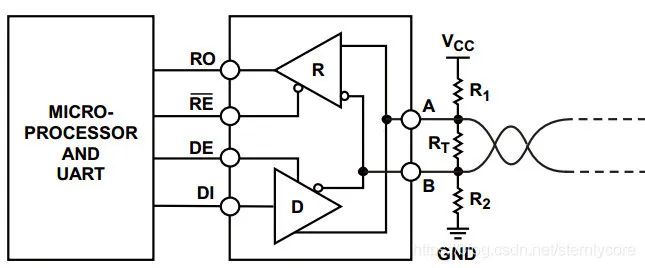
故障安全(Fail-Safe)
总线空闲期间,没有器件驱动总线,接收器输出处于未定义状态。这会导致UART上接收到随机数据,进而影响无效起始位或帧错误。为了解决该问题,可以在总线上放置上拉下拉电阻进行偏置,具体上下拉电阻大小选择后面会讲到,如下图所示:
R1和R2计算如下(假设RT=120Ω):
R1=R2=R
VIA-VIB ≥ 200mV
VIA-VIB = RT*VCC / (2R+RT) = 200mV
if VCC = 5V,then R = 1440Ω
if VCC = 3V,then R = 960Ω
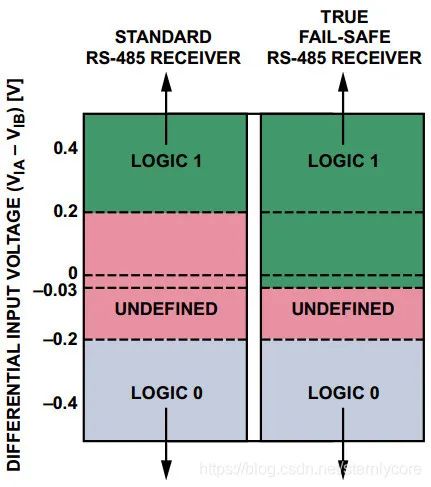
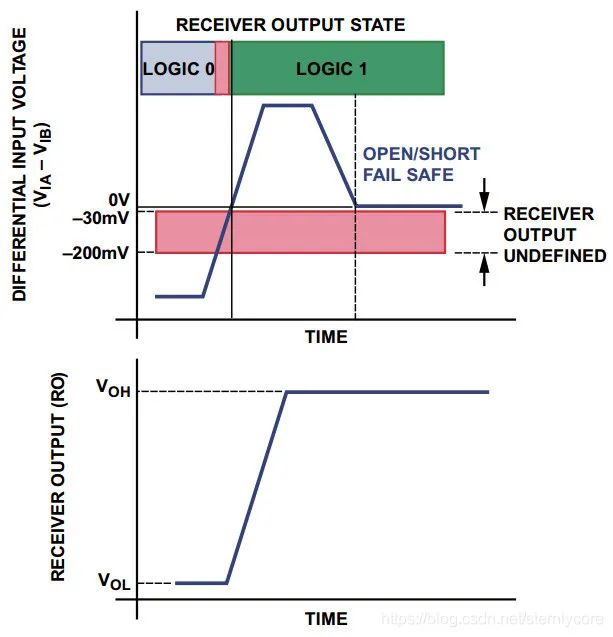
如果R值有较低值(VIA-VIB>200mV),系统有更大的噪声裕量。当然上下拉电阻会导致DC电流偏置,增加Tx负载,使得节点数量减少。有关总线状态和差分输入电压图形如下图所示:
真故障安全接收器(Ture Fail-Safe Receivers)
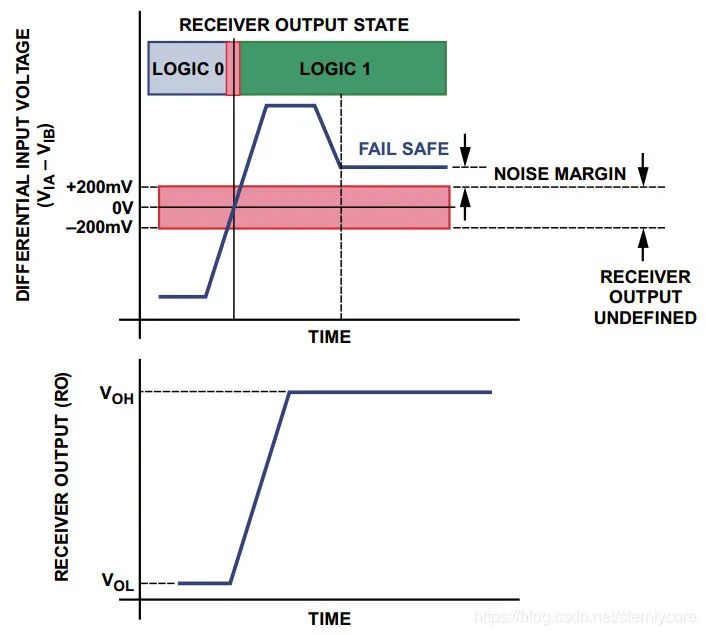
新一代RS-485接收器经过改进,使差分输入阈值电压从±200mV调整至-200mV和-30mV,这样就可以省去使用上下拉电阻。在总线空闲期间,VIA-VIB=0(大于-30mV)导致接收器输出处于高电平(RO=1),处于确定状态。
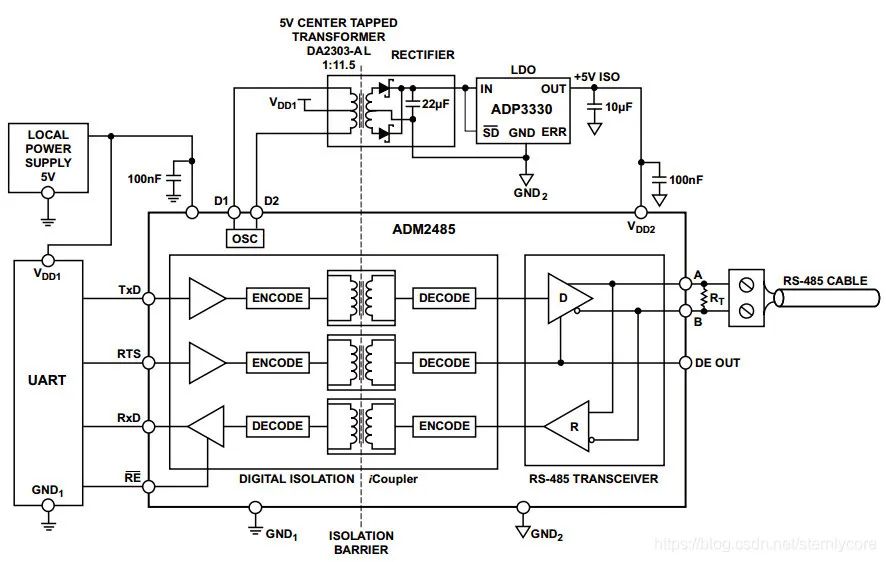
隔离
RS-485通常使用较长链路,这会引起总线上不同节点的地电平略有不同,当有较大地电势差时会以共模干扰的形式叠加到传输线上。如果叠加的干扰信号超出接收器输入共模范围,依靠本地接地作为电流回路是很危险的,最好的解决方式是使用信号和电源隔离来实现健壮的长距离传输,下图是ADI ADM2485隔离RS-485芯片连线示意图:
ESD保护
在工业应用中,雷击、电源波动、静电放电会产生较大的瞬变电压对RS-485收发器造成损害。以下ESD保护、EFT保护和浪涌保护技术规范适用于RS-485应用:
-
IEC 61000-4-2 ESD protection
-
IEC 61000-4-4 EFT protection
-
IEC 61000-4-5 surge protection
使用外部钳位器件(比如TVS二极管),保护程度可进一步提升。在RS-485应用中,TVS是将总线上的电压钳位到RS-485收发器的共模电压范围(-7–12V)。一些TVS器件专门为RS-485Y应用设计。对于更高的电源瞬变,可在受保护器件与输入引脚之间增加电阻RS(10-20Ω)来加强保护。
 0
0








