
我们将解释电机伺服控制,首先让我们从伺服控制的基础“反馈控制”开始。
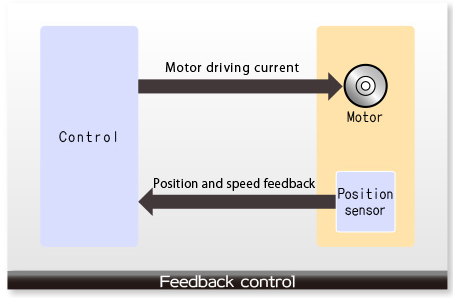
反馈控制
电机是一种把电能转换成旋转运动的装置。为了正确地旋转电机,必须执行反馈控制。反馈控制将监控电机的旋转方式,并根据结果确定提供给电机的电流量。换句话说,通过以下步骤可以保持适当的转速:1、检测电机转速。2、决定应该增加还是降低电机的转速。3、根据决定,增加或减少提供给电机的电流。
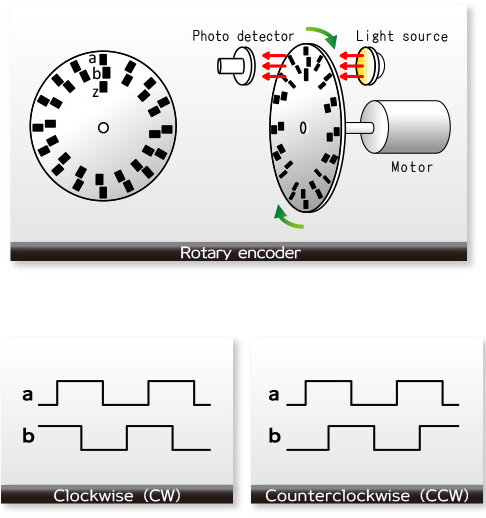
为了执行反馈控制,需要获取转子上的旋转信息。获取信息的其中一个设备便是旋转编码器。旋转编码器的说明如下。
转子上有许多开孔的圆盘。一个光电探测器放在圆盘的一边,一个光源放在另一边。圆盘与转子一起旋转。当圆盘的孔位于光源前面时,光到达光检测器,于是检测到圆盘的孔。如果转子转动缓慢,孔移动的周期将变长。如果转子转动很快,孔的检测周期就会变短。从而可以检测转子的转速。另外,在圆盘上多开一个孔,用它来决定圆盘的起点。这样,即使孔一个接一个地出现,也可以从起点开始计算孔的数量。用这种方法可以检测转子的当前旋转位置。但是也会丢失转换的重要信息。也就是说,无法获取转子是顺时针旋转还是逆时针旋转的信息。所以我们再做一行孔,使每个新孔都稍微偏离原来的孔。这样,根据两排孔的相对位置关系可以判断转子是顺时针(CW)旋转还是逆时针(CCW)旋转。
这就是旋转编码器的工作原理。
伺服控制是一种反馈控制,常用于电机控制。
伺服控制用于有两个对象的情况,即一个“指导员”和一个“操作员”,“指导员”发出命令,“操作员”执行命令。使“操作者”严格按顺序操作的方法便是伺服控制。例如,当老师对学生说“走”、“停”或“右转”时,学生会按照指示移动。这就是伺服控制。
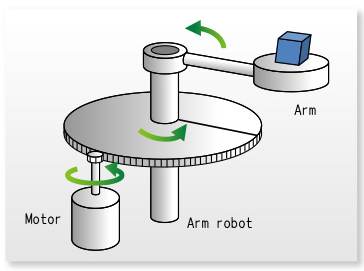
让我们看一下电机的伺服控制:如何移动手臂机器人。例如,假设一个手臂固定在大齿轮上,齿轮与安装在电机上的小齿轮一起旋转。电机的旋转将按照旋转次数的比例移动手臂。现在,假设电机必须旋转100次才能使手臂旋转一次。所以为了将手臂旋转90度,电机需要旋转25次。即伺服控制指令为“旋转25次”。如果电机从停止状态立即开始移动,并且仅转动25次,则手臂可以旋转90度。
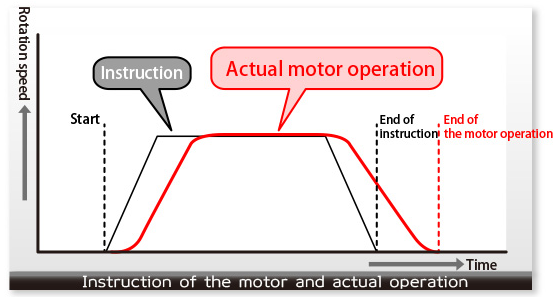
但是经验告诉我们,现实并不是那么简单。当用手臂旋转齿轮时,电机需要一段时间才能从停止状态开始移动。另外,在暂停电机时,即使发出停止指令,电机仍会滑行一段短时间。所以即使给电机一个旋转25次的指令,也不能确定电机的实际旋转次数是25次。
PID控制
采用PID控制来控制伺服控制的速度。
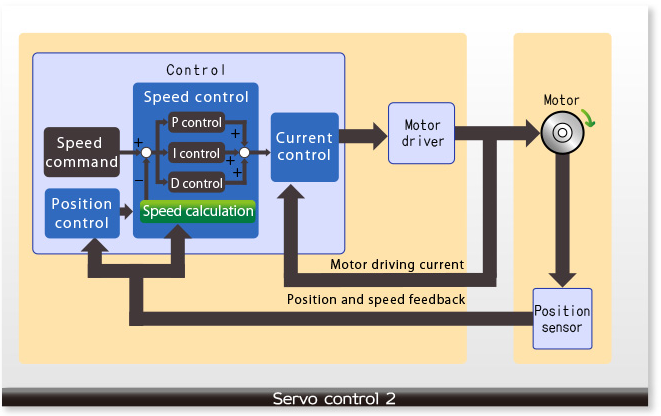
PID控制将并行执行每个控制:P控制(比例控制)、I控制(积分控制)和D控制(微分控制)。
由于每个控制都具有有用的作用,因此这些控制的组合可以轻松地处理各种变化。比例(P)控制是简单的放大:如果当前值小于设定值,则该值将以正方向进行控制,如果当前值较大,则该值将以负方向进行控制。在许多情况下,使用比例(P)控制不能达到目标值,因此我们增加了积分(I)控制。积分(I)控制将根据当前状态决定与总差异(积分值)成比例的电机驱动电流。换言之,它是校正累积变化的控制。
相反,微分(D)控制是一种处理意外状态的控制。变化程度越大,微分(D)控制使得状态恢复原位的力就越大。这对于下列情况而言是一种有效的控制:突然增加/移除过大的负载,电压变得不稳定或突然降低,当外部干扰影响时,需要将状态恢复到原来的位置。
因此,PID控制可以使电机转速达到理想转速。
微控制器的作用
近年来,微控制器被用于伺服控制。微控制器通过软件实现伺服控制。微控制器通常用作系统控制器,不仅控制伺服控制,还能控制各种各样的东西。伺服控制与伺服控制以外的控制异步执行。此外,伺服控制需要定期执行。如果同时发生,微控制器必须优先考虑伺服控制或者是作为系统控制器的控制。但是接收到低优先级的那个微控制器不能延迟到所需的时间。微控制器控制的系统功能越高或者控制精度越高,这种现象就越频繁发生。为了避免这种情况,需要提高微控制器的处理速度。
一般来说,它可以通过加快系统时钟来实现,但这会增加功耗,从而产生噪音和热量。此外,有时会因为微控制器的操作限制,您可能无法加速。为了解决这一问题,我们可采用几种方法降低微控制器的处理负载:采用微控制器协处理器进行伺服控制,将伺服控制和系统控制的硬件分开。可编程伺服/顺序控制器(PSC)可以与系统控制异步启动,并执行伺服控制过程。它是一个单一IC,但伺服控制和系统控制由硬件单独处理。系统时钟可以保持在低频率。
本文内容来自于面包板社区,版权属于原作者。
 0
0







