
01
什么是步进电机
步进电机是一种直接将电脉冲转化为机械运动的机电装置, 通过控制施加在电机线圈上的电脉冲顺序、 频率和数量, 可以实现对步进电机的转向、 速度和旋转角度的控制。在不借助带位置感应的闭环反馈控制系统的情况下、 使用步进电机与其配套的驱动器共同组成的控制简便、 低成本的开环控制系统, 就可以实现精确的位置和速度控制。
02
基本结构和工作原理
基本结构:
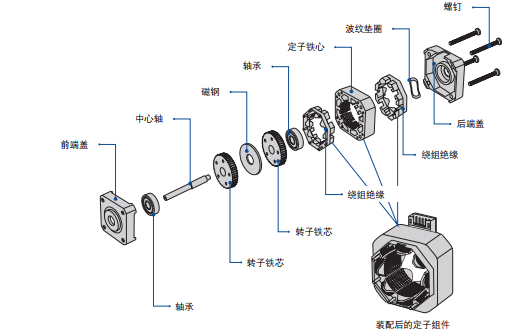
工作原理:
以1.8度两相步进电机为例:当两相绕组都通电励磁时, 电机输出轴将静止并锁定位置。在额定电流下使电机保持锁定的最大力矩为保持力矩。如果其中一相绕组的电流发生了变向, 则电机将顺着一个既定方向旋转一步( 1.8度)。
同理, 如果是另外一项绕组的电流发生了变向, 则电机将顺着与前者相反的方向旋转一步( 1.8度)。当通过线圈绕组的电流按顺序依次变向励磁时, 则电机会顺着既定的方向实现连续旋转步进, 运行精度非常高。对于1.8度两相步进电机旋转一周需200步。
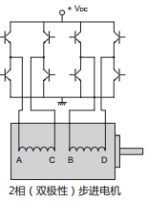
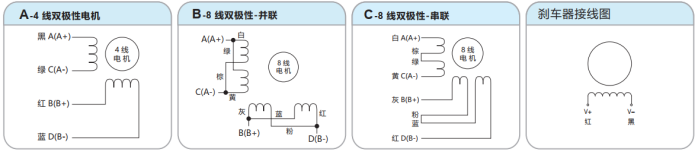
两相步进电机有两种绕组形式:双极性和单极性。双极性电机每相上只有一个绕组线圈, 电机连续旋转时电流要在同一线圈内依次变向励磁, 驱动电路设计上需要八个电子开关进行顺序切换。
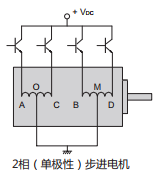
单极性电机每相上有两个极性相反的绕组线圈, 电机连续旋转时只要交替对同一相上的两个绕组线圈进行通电励磁。驱动电路设计上只需要四个电子开关。在双极性驱动模式下, 因为每相的绕组线圈为100%励磁, 所以双极性驱动模式下电机的输出力矩比单极性驱动模式下提高了约40%。
PART2.
01
负载
A. 力矩负载 (Tf)
Tf = G * rG: 负载重量r: 半径
B. 惯量负载 (TJ)
TJ = J * dw/dtJ = M * (R12+R22) / 2 (Kg * cm)M: 负载质量R1: 外圈半径R2: 内圈半径dω/dt: 角加速度
02
速度-力矩曲线
速度-力矩曲线是步进电机输出特性的重要表现形式。
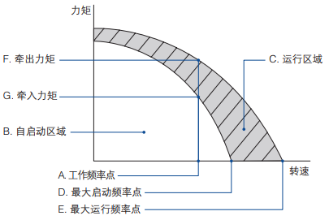
A. 工作频率点
n = q * Hz / (360 * D)n: 转/秒Hz: 频率值D: 驱动电路细分值q: 步距角
例如: 距角1.8°的步进电机, 在 1/2 细分驱动方式下(即每步 0.9°) , 工作频率 500Hz 时的转速为1.25r/s.
B. 自启动区域
C. 连续运行区域
在该区域内, 电机无法直接启动或停止。 电机在该区域内运行必须先经过自启动区域, 然后经过加速达到该工作区域运行。 同理, 电机在该区域内也无法直接制动, 否则容易造成电机失步, 必须先经减速到达自启动区域内再制动。
D. 最高启动频率
电机空载状态下, 保证电机不丢步运行的最大脉冲频率。
E. 最高运行频率
空载情况下, 已励磁电机运行而不丢步的最高脉冲频率。
F. 启动力矩/牵入力矩
满足步进马达在一定脉冲频率下启动并开始运行, 不失步的最大负载力矩。
G. 运行力矩/牵出力矩
03
加速/减速运动控制
当电机运行频率点在速度-力矩曲线的连续运行区域内时, 如何缩短电机启动或停止时的加速或减速时间, 使电机更长时间地运行在最佳速度状态, 从而提高电机的有效运行时间是非常关键的。
如下图所示, 步进电机的动态力矩特性曲线, 低速运行时曲线为水平直线状态; 高速运行时, 由于受到电感的影响, 曲线发生了指数下降。
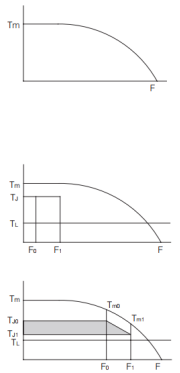
A. 低转速状态下的直线加速运行
已知电机负载为TL, 假设想从F0 在最短时间 (t r)内加速到F1, 如何来计算最短时间 t r ?
(1) 通常情况下 TJ = 70%Tm(2) tr = 1.8 * 10 -5 * J * q * (F1-F0)/(TJ -TL)(3) F (t) = (F1-F0) * t/tr + F0, 0
B. 高转速状态下的指数加速运行
(1) 通常情况下
TJ0 = 70%Tm0TJ1 = 70%Tm1TL = 60%Tm1
(2)
tr = F4 * In [(TJ 0-TL)/(TJ 1-TL)]
(3)
F (t) = F2 * [1 – e^(-t/F4)] + F0, 0
04
振动与噪音
一般来讲, 步进电机在空载运行情况下, 当电机的运行频率接近或等于电机转子的固有频率时会发生共振,严重的会发生失步现象。
针对共振的几种解决方案:
A. 避开振动区:使电机的工作频率不落在振动范围内
B. 采用细分的驱动模式:使用微步驱动模式, 将原来的一步细分为多步运行, 提高电机的每步分辨率, 从而降低振动。这可以通过调整电机的相电流比来实现的。微步并不会增加步距角精确度, 却能使电机运行更加平稳, 噪音更小。一般电机在半步运行时, 力矩会比整步时小15%, 而采用正弦波电流控制时, 力矩将减小30%。
PART3.
01命名规则
| AM | 17 | HD | 0 | 0 | 01 | - | 01 |
| 1 | 2 | 3 | 4 | 5 | 6 |
|
7 |
| 1 | 产业机器专用系列 |
|
|
2 |
机座号 |
电机外形尺寸 ( 机座尺寸为英制尺寸的 10 倍 )(6:14mm; 8:20 mm; 11:28mm; 14:35mm; 17:42mm; 23:56mm; 24:60mm;34:86mm; 42:110mm) |
| 3 | 步距角代号 | HY, HS, HD: 步距角 1.8° |
| 4 | 铁芯长度代号 |
|
| 5 | 引线数量 | 0: 表示插座式电机4: 引出线 4 根8: 引出线 8 根 |
| 6 | 性能代号 | 表示电机的电流,力矩等性能参数 |
|
7 |
机械代号 |
表示电机的出轴、引线、螺钉、刹车器及编码器等机械参数-E1000D 编码器型、 -PGXX 减速机型、 -BR01 永磁式制动器型 |
02接线图
03一般规格
| 规格 | 电机部分 | |
| 步距角精度 | ±5% ( 测试条件:恒流驱动器 /24V/ 两相通电 / 额定电流 / 整步速度:1rps) | |
| 绝缘等级 | B 级 (130°C) | |
| 使用环境(运行时) | 环境温度 | -20 ~ +50°C ( 无结冰 ) |
| 环境湿度 | 85% 以下 ( 无结露 ) | |
| 介质环境 | 无腐蚀性气体及尘埃。不直接接触水、 油等(标准型保护等级 IP65 规格:无腐蚀性气体。不直接接触油。) | |
| 温度上升 | 温升小于 80°C ( 温升是指在一定环境温度条件下, 线圈温度增加的最大值。绕组温度的测试采用电阻法。在恒压驱动模式下,驱动电压为额定电压, 两相通电, 转速为 0pps。在恒流驱动模式下, 驱动电流为额定电流, 两相通电, 转速为空载起动频率。散热板:铝板 160×160×t1.6(mm)) | |
| 径向跳动 | 0.050T.I.R.(mm) | |
| 径向窜动 | 0.02mm Max.(500gf) | |
| 轴向窜动 | 0.08mm Max.(500gf) | |
| 安装法兰相对于转轴的同轴度 | 0.075T.I.R.(mm) | |
| 安装面相对于转轴的垂直度 | 0.100T.I.R.(mm) | |
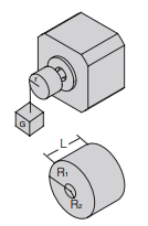
04转轴负载条件(单位:N)
| 机座型号 | 允许径向负载(距轴端的距离 L) | 允许轴向负载 | ||||
| 0mm | 5mm | 10mm | 15mm | 20mm | ||
| 6HY | 12 | 15 | 20 | --- | --- | 电机本身重量以下 |
| 8HY | 12 | 15 | 20 | --- | --- |
|
| 11HS | 20 | 25 | 34 | 52 | --- |
|
| 14HS | 20 | 25 | 34 | 52 | --- |
|
| 17HD | 20 | 25 | 34 | 52 | --- |
|
| 23HS | 50 | 60 | 75 | 100 | 150 |
|
| 24HS | 61 | 73 | 90 | 110 | 160 |
|
| 34HD | 260 | 290 | 340 | 390 | 480 |
|
| 42HS | 390 | 435 | 510 | 585 | 720 |
|
 0
0







