方法概述
UWB 主要应用于室内定位,GPS 主要应用于室外定位。因为在室内往往 GPS 信号很差导致 GPS 相关代码在室内用不上,尝试用 UWB 位置数据来替代 GPS 来进行室内导航。这样做把已有的 GPS 相关代码应用起来,避免从算法入手而引起对代码的大面积修改。
再偷懒一点,UWB 买的是研创物联的,定位代码是现成的,再花点钱买他们的上位机软件,协议报文解析代码也到手了。现在等于直接拿到了可用于替换 GPS 的位置信息。下面就做个代码搬运就行了,所以本文就是个技能类推文。
方法实操
以研创物联的 UWB 为例进行说明。
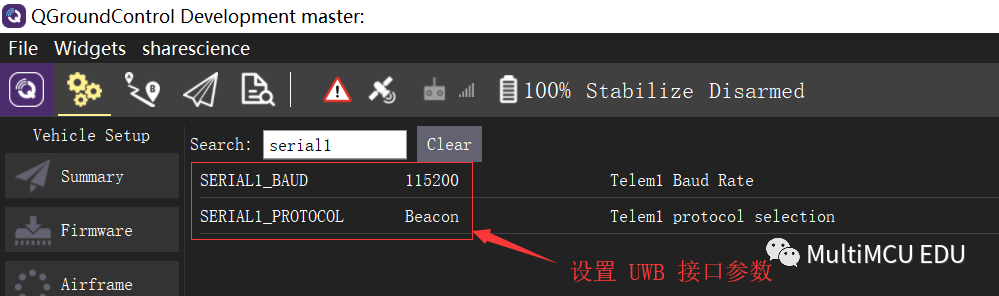
一、将 UWB 接到飞控的串口上
TELEM1 或 TELEM2 随意,接好后调整串口协议参数,如下:
二、按照 ardupilot 的前后台架构加入自己 UWB 相关代码
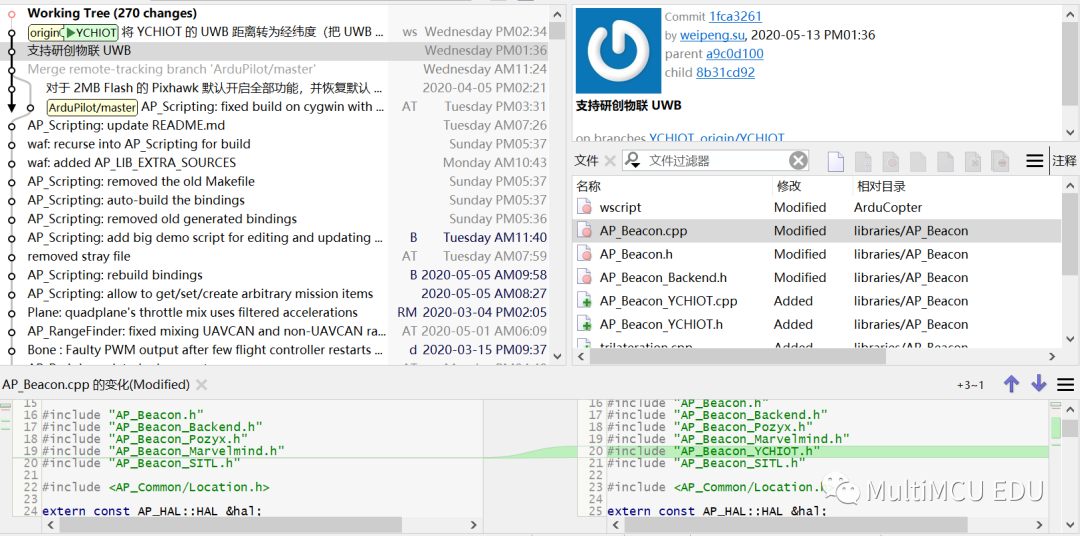
这部分程序的作用是按协议解析出 UWB 输出的相对位置,以 cm 为单位。
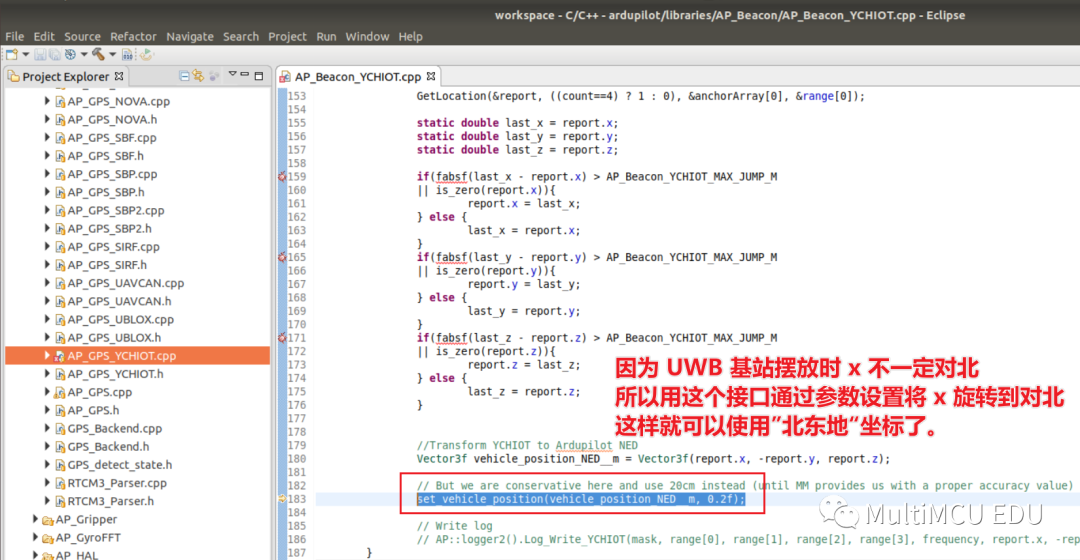
三、在 AP_GPS 里加一个数据来源于 UWB 的 GPS 设备
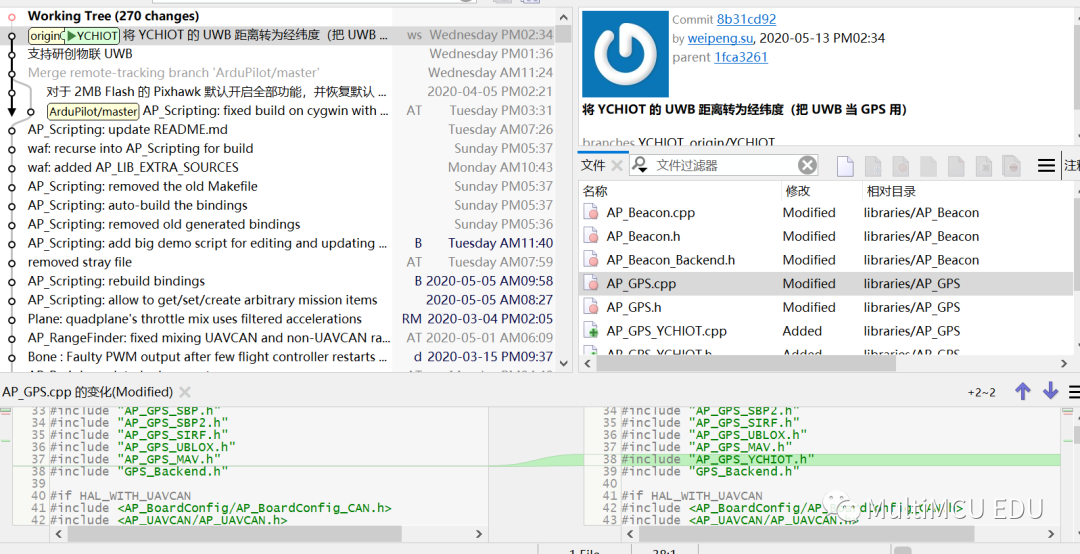
这部分程序的作用是把 UWB 的相对位置转换成经纬度。
UWB 相对位置转经纬度方法
1、地球半径 6378137 米
2、1 纬度对应的米数
1*(pi()/180)*6378137 = 111319.490793274 1*1e7*1e-7*6378137*(pi()/180) = 111319.490793274 1e-7*6378137*(pi()/180) = 0.0111319490793274
3、纬度差对应的米数
(纬度差*1e7) * 0.0111319490793274 = 纬度差对应的米数
4、如何得到“目标纬度”
(目标纬度 * 1e7 - 初始纬度 * 1e7) * 0.0111319490793274 = 纬度差对应的米数 目标纬度 * 1e7 = 初始纬度 * 1e7 + 纬度差对应的米数 / 0.0111319490793274
由此可见我们只要从参数里设好初始纬度就能把 UWB 的相对位置转换成目标纬度了。
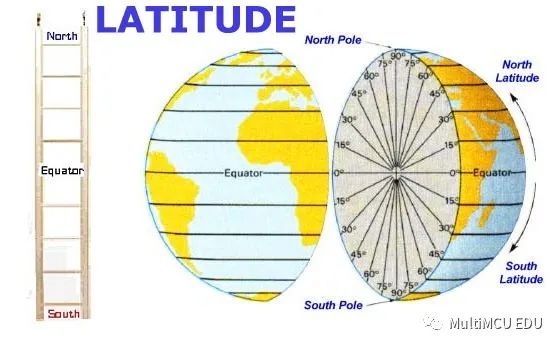
5、目标经度与当地纬度的关系
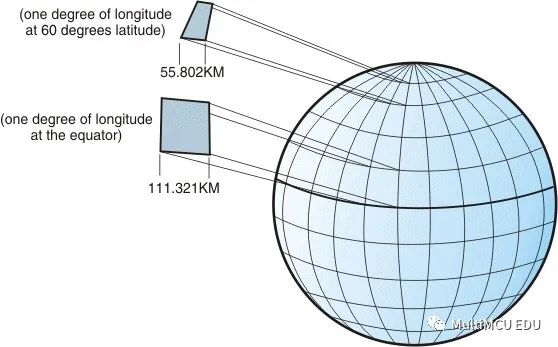
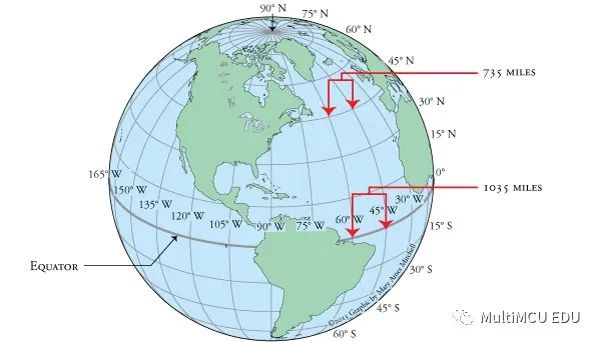
通过上面两图不难发现:相同的经度差对应的距离差在地球不同的位置是不同的,需要用当地的纬度修正一下。在 ArduPilot 里有现成的修正方法,可以自己照样写个接口,如下:
AP_Beacon::get_singleton()->get_origin(origin_loc);AP_Beacon::get_singleton()->get_vehicle_position_ned(position, accuracy_estimate); state.location.lat = origin_loc.lat + ((double)position.x * (double)LOCATION_SCALING_FACTOR_INV);state.location.lng = origin_loc.lng + ((double)position.y * (double)LOCATION_SCALING_FACTOR_INV) / (double)longitude_scale(origin_loc);
方法调试
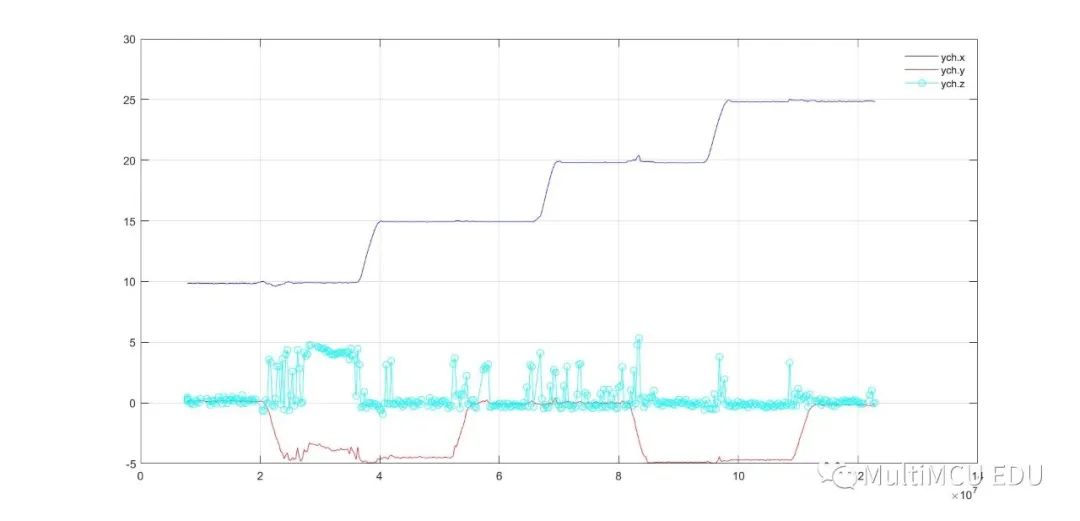
1、拿着 UWB 标签行走,记录x、y、z的相对位置,确认数据正确(量和单位)。
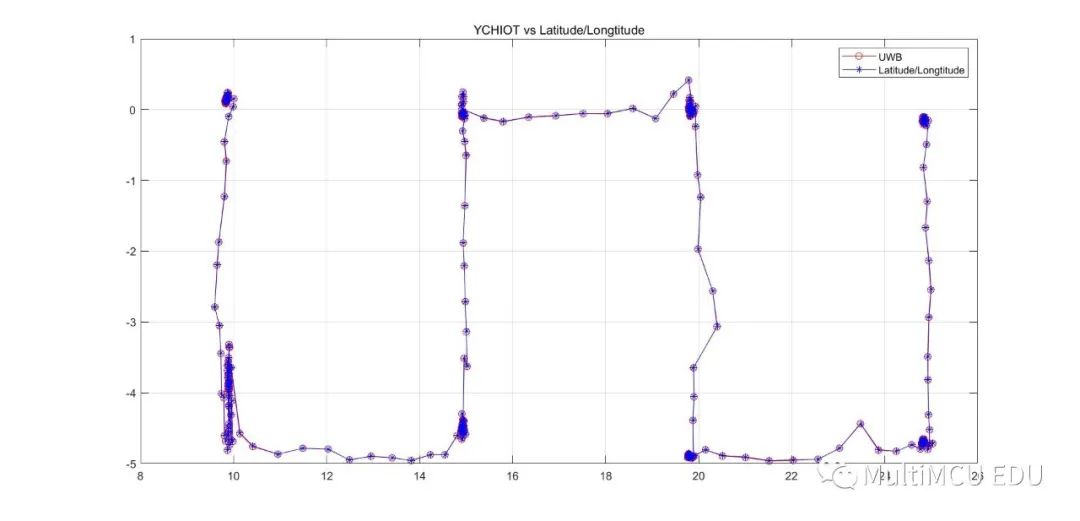
2、调整 UWB 朝向参数,使 UWB 相对位置与 GPS 经纬度转出的位置重合。
到这个时候还不能用来导航,因为 GPS 除了报出经纬度还会报出经纬度方向的速度,而 UWB 只有位置没有速度,这样与 ArduPilot 原有的数据融合算法就对不上了。我们可以用位置的微分当作速度,如下:
if(fabsf((double)position.x - _last_x_m) > 0.03f || fabsf((double)position.y - _last_y_m) > 0.03f){ double pass_time_s_inv = (double)1000.0f / (double)(AP_HAL::millis() - _last_pos_time); state.velocity.x = ((double)position.x - _last_x_m) * pass_time_s_inv; state.velocity.y = ((double)position.y - _last_y_m) * pass_time_s_inv; state.ground_speed = sqrtf(sq(state.velocity.x) + sq(state.velocity.y)); state.have_speed_accuracy = true; state.speed_accuracy = 0.5f; _last_x_m = (double)position.x; _last_y_m = (double)position.y; _last_pos_time = AP_HAL::millis();}
至此就可以用 ArduPilot 原有的数据融合方法使用 UWB 数据进行粗略的室内位置导航了。
技术技能与方法论
技术研发向来是“方法论”与“技术技能”并行发展的过程。在没有足够的“技术技能”之前学习“方法论”的结果通常是:原来如此简单,但就是做不出来。在掌握“方法论”之前学习“技术技能”通常会存疑:学这么多玩儿意儿有啥用,又多又枯燥好烦哪。
Sugar 推文特色是将“方法论”和“技术技能”有节奏地划分。推荐先掌握一定的“技术技能”,在量的积累到达一定程度的时候接触相应级别的“方法论”。姿态解算算法系列推文还差两个部分就到一小段落了,分别是:进阶算法的互补滤波、进阶算法的线性 Kalman 滤波。就以姿态解算算法为例,下面 说一说相关的技术技能与方法论是怎样统一的。
一直跟着 推文的读者都知道,从去年 6 月起到现在,除了最近姿态解算类推文是重在讲“算法”的之外,其余都偏重于“编程技能类”推文,这与 上面说的“先掌握技能”一致。控制技术的相关技能可以划分为两大部分:算法研究和编程能力。其中编程能力是最基本的,所以 先结合 RT-Thread 做了软件架构训练,先把编程技能推到需要的高度。在很多读者的支持下给自己家两岁宝宝的生日礼物“小麦轮车”演变成了承载方法论和技术技能的实体。
这个开源项目结合的编程技能有(只挑出部分):
1、ArduPilot 软件架构;
2、RT-Thread 操作系统;
3、ArduPilot 实时数据采集方法(文件系统应用);
4、mavlink 协议通信;
5、ESP8266 Wifi UDP 数据传输;
7、MATLAB UDP 数据接收;
8、nRF24L01 无线通信;
9、ArduPilot 数学库的移植与使用;
10、project generator 减小多平台软件维护成本。
这个开源项目结合的算法有:
1、ArduPilot 当前最新 PID 控制算法移植与应用;
2、麦克纳姆轮的运动分解方法。
这些推文的安排是在“方法论”作用下的,用最简单的遥控车形式承载这个方法论:先有看到真实数据的能力,依此为基础为算法的应用和调试打开空间。
 0
0