
对于半导体行业的系统设计人员而言,电磁干扰(Electromagnetic interference, EMI)始终都是一大挑战。在当今的系统设计中,电子元器件布局密集紧凑,处理器速度和数据速率超过以往任何时候,因而这种挑战变得更为严峻。系统时钟是产生 EMI 的主要因素。
MEMS 振荡器已得到了非常广泛的使用,并在很多需要生成时钟的应用中稳步取代晶体振荡器。MEMS 振荡器与晶体振荡器相比具有显著的优势,其中之一就是它们能够灵活地进行编程和配置。
本文将重点描述如何利用MEMS振荡器的可编程特性来帮助减少 EMI。
简介
时钟发生器是系统中产生 EMI 的主要因素。方波时钟信号的频谱包括基频以及大量奇次谐波,具有很大的能量。时钟变化越急剧,谐波的能量就越大,产生的 EMI也越高。
减少 EMI 的传统方法包括精心布线、滤波和屏蔽。所有这些方法都会增加成本,占用更多电路板空间。
MEMS 振荡器已被广泛用于生成时钟,并在很多应用中稳步取代晶体振荡器,包括消费、工业和汽车应用以及部分网络和电信应用。MEMS 振荡器与晶体振荡器相比具有显著的优势。
主要优势之一是 MEMS 振荡器可灵活选择并编程多种参数。其中一个参数是输出驱动强度,该强度与时钟信号的上升和下降时间相关。通过延长上升和下降时间可以减少时钟的谐波能量,从而降低 EMI,因为辐射的能量与谐波的能量相关。另一个可编程的特性是展频,该功能将随时间对时钟频率进行调制,基频及其谐波的频谱能量峰值将会降低。
以下将更加详细地介绍如何利用 MEMS 振荡器的上升和下降时间的可编程特性及展频功能来减少 EMI。
请参见 以了解MEMS振荡器相对于传统晶体振荡器的重要优势。
可编程的上升 / 下降时间
有些 Microchip MEMS 振荡器系列 (例如 DSC11xx 和DSC2010)可对 CMOS 输出缓冲器的驱动强度进行编程,这会影响输出信号的上升和下降时间。DSC2010 提供三路输入(OS0、OS1 和 OS2),可使能八种驱动强度中的一种。 DSC1101 在出厂前已编程为使用最高驱动强度, DSC1105 则编程为使用最低驱动强度。
当应用需要快速的上升/下降时间或器件需要驱动很高的容性负载时,高驱动强度是有利的。它还有助于减少电源噪声对时钟抖动的影响。
在表 1 中,最低的驱动强度对应于最慢的上升 / 下降时间。在这种条件下,时钟信号具有最平滑的边沿和最低的谐波能量,因而能够最大程度地减少 EMI。
图 1 显示当输出缓冲器的驱动强度减小时谐波的衰减曲线。
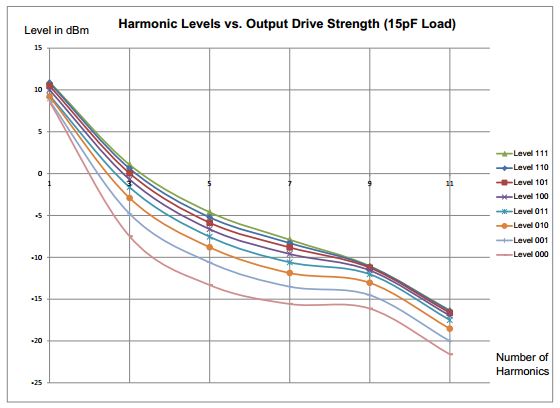 图1:MEMS 振荡器在八种驱动强度下的基频和谐波功率
图1:MEMS 振荡器在八种驱动强度下的基频和谐波功率表 1: 八种驱动强度的上升 / 下降时间(15 PF负载)

展频
展频是一种随时间对时钟频率进行缓慢调制的功能。MEMS 谐振器内部的 PLL 采用 33 kHz 的三角波进行调制。在如此缓慢的调制速度下,基频和所有谐波的频谱能量峰值分布在更广的频率范围内。能量因此显著减少,从而也减少了 EMI。选择三角波的原因是它具备均匀分布的频谱密度。
Microchip 的 MEMS 振荡器系列 DSC63xx 提供多个调制选项。展频可能是相对于时钟频率的中心展频或向下展频。中心展频的范围为 ±0.25% 至 ±2.5%,而向下展频的范围为 –0.25% 至 –3%。
如果时钟频率为 100 MHz 并选择 ±1% 的中心展频,则输出时钟的范围为 99 MHz 至 101 MHz。如果选择 –2%的向下展频,则输出时钟的范围为98 MHz至100 MHz。
图 2 和图 3 显示了 DSC6331 的频谱示例,时钟频率为33.333 MHz,采用 ±1% 的中心展频进行调制。
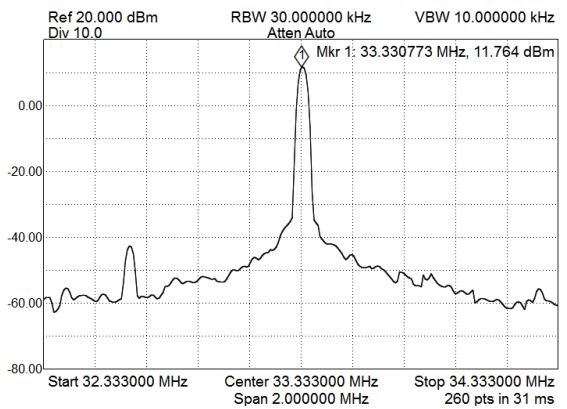 图 2:调制关闭时 DSC6331 在33.333 MHz 频率下的频谱
图 2:调制关闭时 DSC6331 在33.333 MHz 频率下的频谱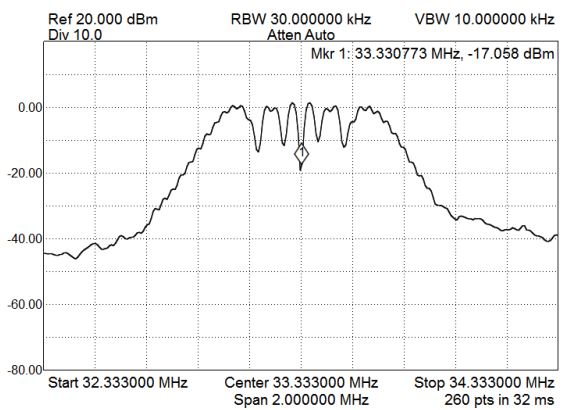 图 3:调制打开时 DSC6331 在33.333 MHz 频率下的频谱
图 3:调制打开时 DSC6331 在33.333 MHz 频率下的频谱
可以看到,展频将峰值功率降低了大约 10 dB。也可使用以下公式估算这一降幅:
公式 1:
EMIReduction = 10 × Log10( ) S fc RBW × ⁄
其中:
S 展频百分比峰 - 峰值 (在本例中为 1%)。
fc 载波频率 (在本例中为 33.333 MHz)。
RBW 频谱分析仪的分辨率带宽 (在本例中为30 kHz)。
本例的理论计算结果等于 10.45 dB,与测量结果一致。与基频类似,所有谐波也以相同的方式展频和衰减。
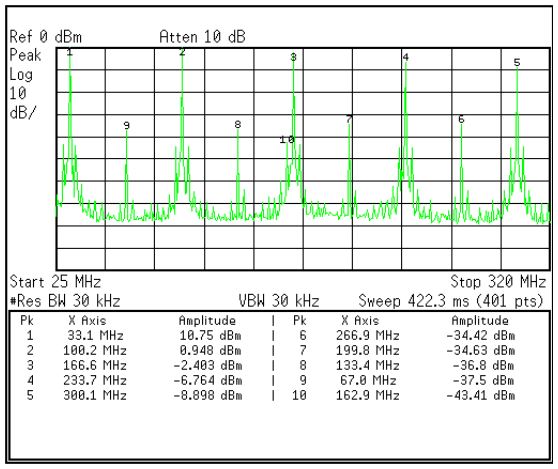 图 4: 展频禁用时的 DSC6331
图 4: 展频禁用时的 DSC6331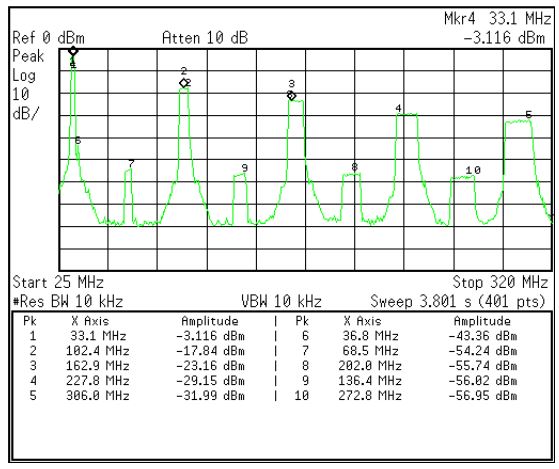 图 5: 展频启用时的 DSC6331,中心展频为 ±2.5%
图 5: 展频启用时的 DSC6331,中心展频为 ±2.5%
图 6 显示当选择不同类型的调制时 DSC6331 的33.333 MHz 基频和奇次谐波的衰减曲线。为清晰起见,图 6 仅显示中心展频选项。但是,相应百分比的向下展频也可提供相同水平的谐波衰减(例如,±1% 的中心展频可提供与 –2% 的向下展频相同的谐波衰减)。
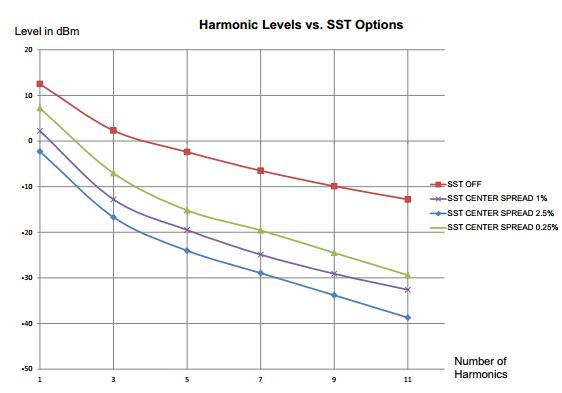 图 6: DSC6331使用不同展频选项时的谐波功率
图 6: DSC6331使用不同展频选项时的谐波功率
结论
EMI 是现代电子设计领域的一大严峻挑战,而时钟发生器是产生 EMI 的主要因素之一。MEMS 振荡器具有灵活和可编程的优势。这些振荡器提供两种重要的可编程特性,帮助减少时钟产生的 EMI。第一种特性是可编程的上升 / 下降时间。更缓慢的上升 / 下降时间可减少与每个时钟信号的谐波相关的能量,这也意味着辐射能量 (EMI)的减少。第二种特性是时钟频率的缓慢调制,称为展频。这种特性也可显著减少与时钟谐波相关的能量。
这些MEMS振荡器的两种可编程特性不仅可减少EMI,还可简化 EMI 滤波和屏蔽设计,从而降低电路板成本并减少占用空间。
 0
0









