
背景介绍:
机器人编程是对硬件编程,现在少儿阶段的“机器人等级考试”也要求具备必要的硬件电路知识。
本篇 Sugar 就来说一说麦轮车上用的电机驱动模块相关的电路知识。结合 Sugar 发过的:
1、
2、
加上本篇算是完整的一套“软硬件无缝接合”的系列推文了。
“H 桥”是什么桥
H 桥是驱动直流马达的电路。
百度百科这样说:
维基百科这样说:
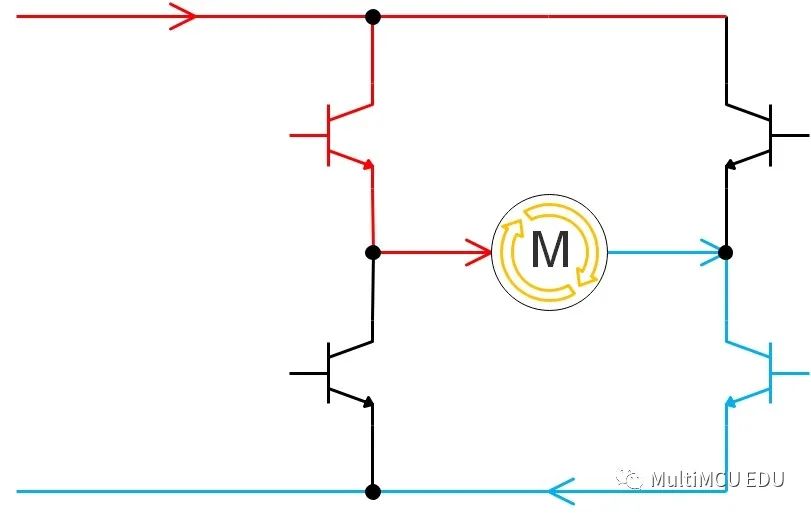
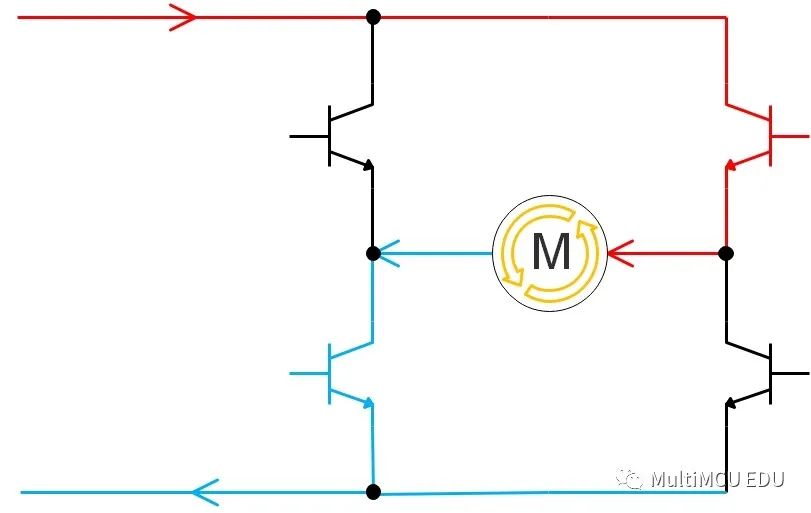
Sugar 两张原创图两眼看懂 H 桥主体工作原理:
约定:
1、线路上的箭头表示电流方向;
2、马达上的箭头表示转动方向;
3、黑色表示三极管不通,红、蓝色表示三极管导通。
“逻辑门”是什么门
上面的三极管当作“开关管”使用,为突出主体没有画出开关管的控制部分。在了解这个控制部分之前,先看下维基百科上的基础知识。
常见的“逻辑”就是:与、或、非。本篇只涉及到“与”和“非”。
一、与门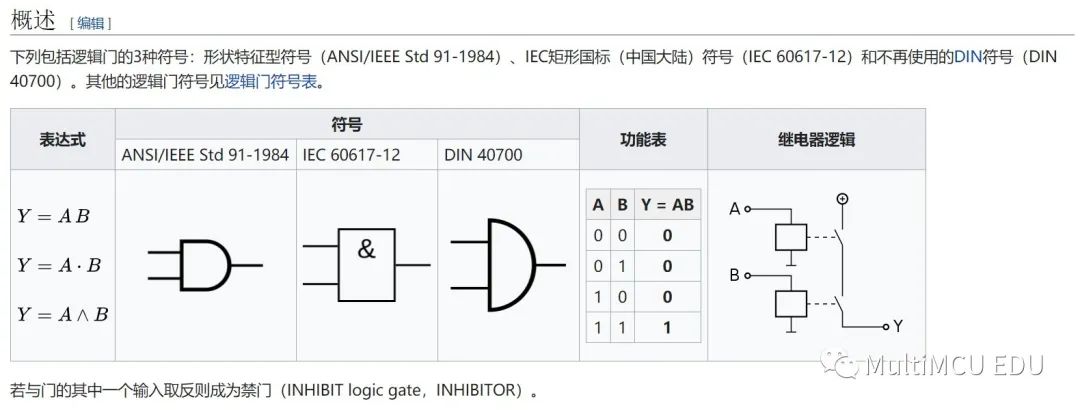
“与门”就是个犟孩子,必须输入两个高电平才能输出高电平,其余都输出低电平。给“与门”画个像就是:
二、非门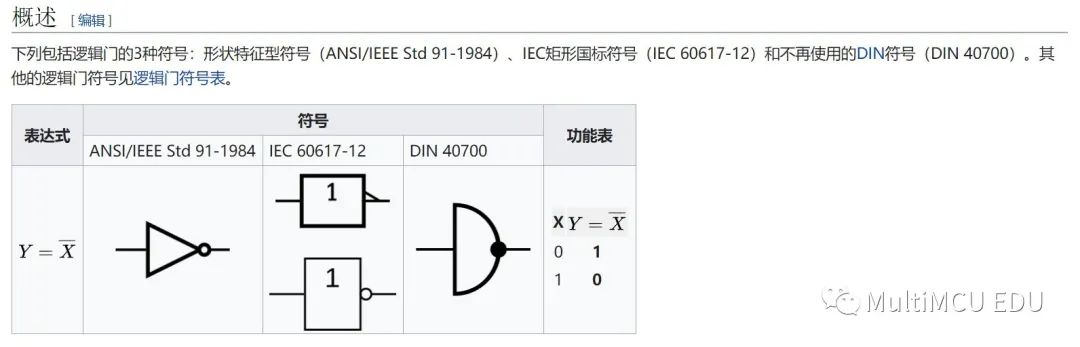
“非门”就是个不听话的孩子,你说东他偏往西。给高电平输入,它给个低电平输出;给低电平输入,它给个高电平输出。表现就是:决对不听话!给非门画个像就是:
一个犟、一个不听话,放到桥上就是栋梁
三极管当开关管使用时可以实现:用弱电控制强电。
打个比方说什么是“弱电控制强电”:三级管的三个引脚就像是一家三口,孩子最弱小,孩子哭闹全家睡不着、孩子睡好全家睡好。
完整的 L298N 的 H 桥是这样的: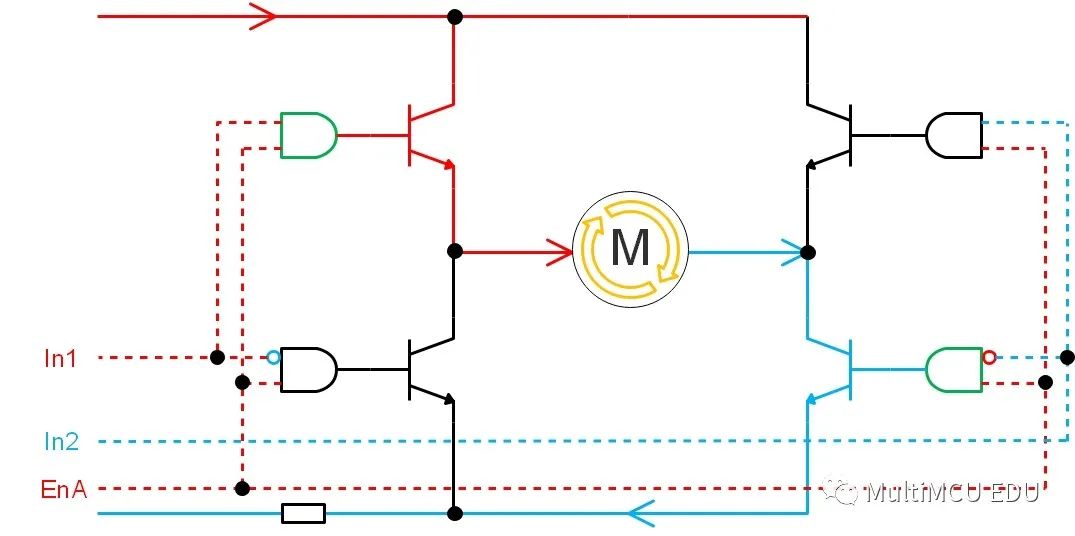
在 L298N 的 datasheet 中用一个圈表示“非门”,Sugar 与 datasheet 保持一致。
上图中 Sugar 的两个约定:
1、“绿色”的与门是导通的,“黑色”的与门不导通;
2、虚线表示弱电,可以是3.3V或5V;实线表示强电,在 Sugar 的麦轮车上是12V。
一种调速方式是在EnA上加调速脉冲,用In1、In2控制转向,如下:
在“与门”和“非门”的控制下,如果EnA是低电平,那么无论In1、In2是什么状态马达都不会转动,如下:
两个引脚控制转向和转速
上面用In1和In2控制转向,用EnA控制转速,占用了 3 个控制引脚。对于引脚少的单片机,可以省掉一个引脚同样达到控制转向和转速的目的。
一个有趣的现象是:在EnA是高电平的情况下,如果In1和In2同时为低电平或同时为高电平,马达也不会转动,如下:
基于这一点,我们可以通过把EnA接固定的高电平,用In1做方向控制、用In2做速度控制。下面先做表、再做图来解释这个用法。
| In1 | 转向 | In2 转速 |
|---|---|---|
| 高 | 负 | 低电平有效 |
| 低 | 正 | 高电平有效 |
这个方法虽然能省一个引脚,但有一点要注意:调速脉冲的极性在正、反转时是不同的。下面通过用 Scratch 的实验来明确表达一下什么叫“调速脉冲极性相反”。
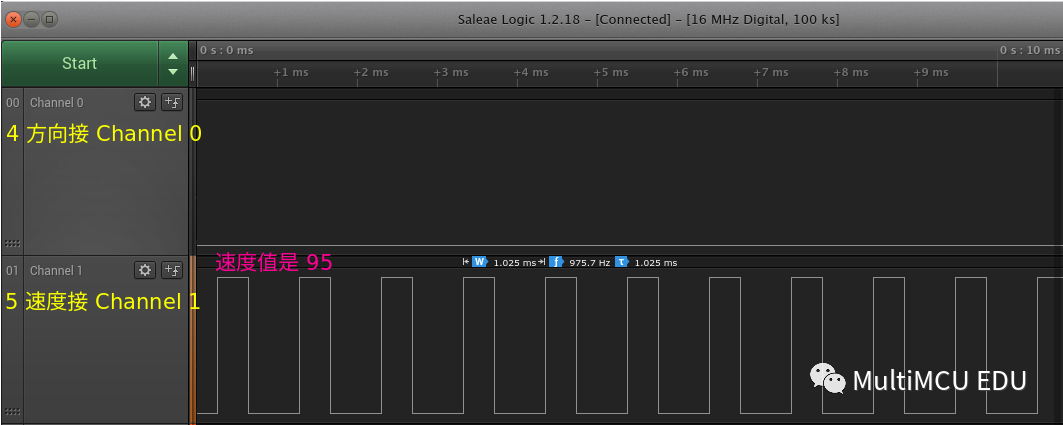

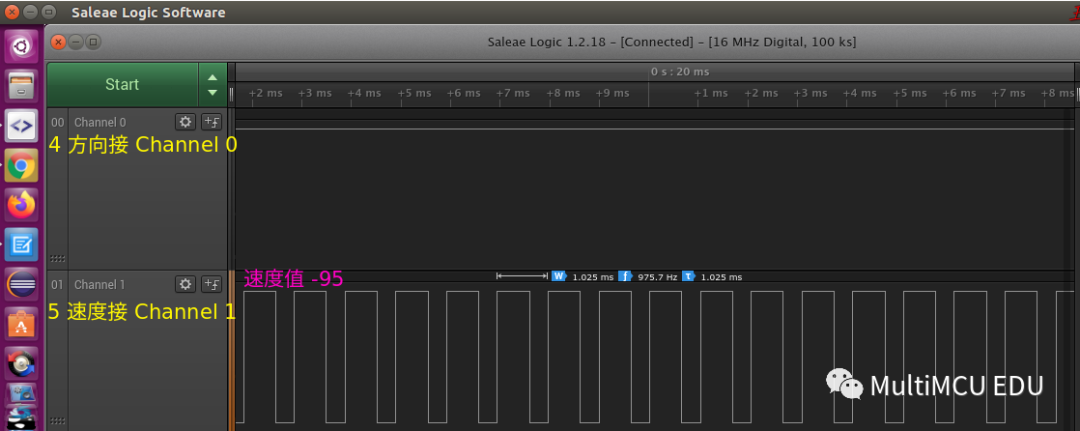
通过实验发现,+95 时是高电平有效,而 -95 时低电平有效,这就叫“调速脉冲极性相反”。与上面表格和动图的表述一致。
PS
本篇的起因是 Sugar 要给四年级的学员讲 L298N 的工作原理,对于大孩子来说可以直接去看 datasheet 上的原理图,如下: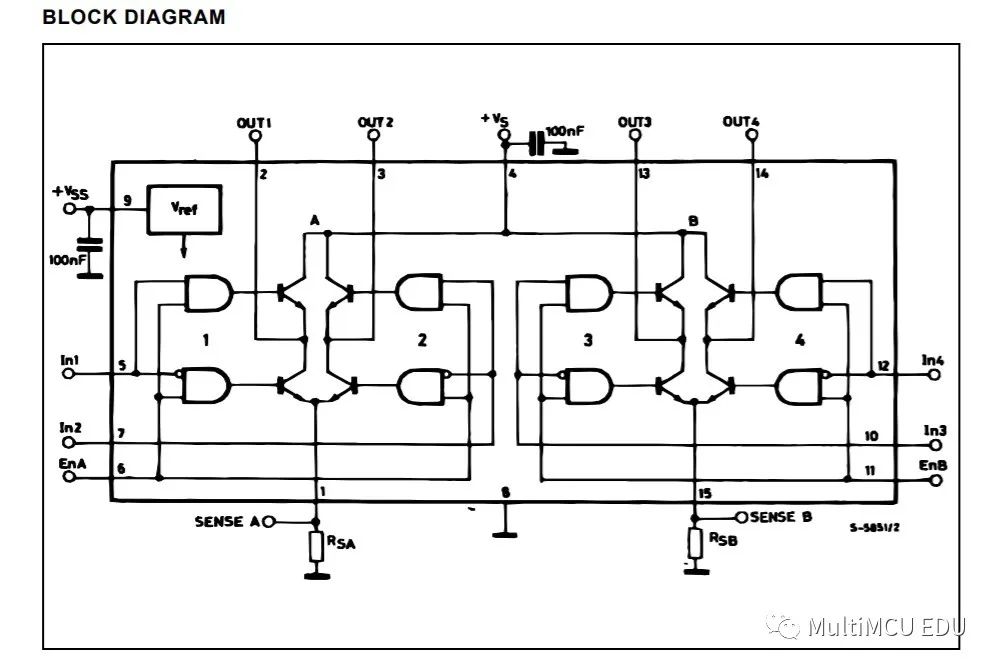
对于四年级的学员,上来就讲这个图肯定会讲蒙的。所以 Sugar 用了“拆分”法,把整体知识拆成好理解的点,再用动图重新组合来讲。
本篇把与门和非门分别比作“犟孩子”和“决对不听话”的叛逆孩子,当把与门和非门与 H 桥结合时发现:坏垓子发挥了巨大的作用。合理的引导是授渔的艺术,合理用人是管理的艺术,艺术人生是美好的人生。
本文源自微信公众号:MultiMCU EDU,不代表用户或本站观点,如有侵权,请联系nick.zong@aspencore.com 删除!
 0
0









