



- Z0是传输线的阻抗;
- ZOUT 是驱动器的输出阻抗,
- ZIN 是接收器的输入阻抗。
- PS:这里仅显示CMOS和PECL/LVPECL电路。
串行端接
实际上,因为阻抗会随频率动态变化,难以达到阻抗匹配,所以缓冲器输出端可以省去电阻(R)。
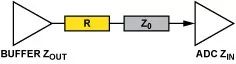
优势:
- 低功耗解决方案(没有对地的吸电流)
- 很容易计算R的值 R (Z0 – ZOUT).
弱点:
- 上升/下降时间受RC电路的影响,增加抖动
- 只对低频信号有效
备注:
- CMOS驱动器
- 不适合高频时钟CMOS drivers信号
- 适合低频时钟信号和非常短的走线
下拉电阻
CMOS
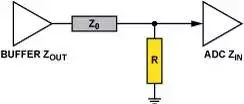
优势:非常简单(R = Z0)
弱点:高功耗
备注:不推荐
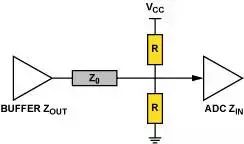
LVPECL

优势:
- 简单的3电阻解决方案。
- 就节能而言稍好一点,相对于4电阻端接来说节省一个电阻。
备注:推荐。端接电阻尽可能靠近PECL接收器放置。
交流端接
CMOS

优势:没有直流功耗。
备注:为避免较高功耗,C应该很小,但也不能太小而导致吸电流。
LVPECL
优势:交流耦合允许调整偏置电压。避免电路两端之间的能量流动。
弱点:交流耦合只推荐用于平衡信号(50%占空比的时钟信号)。
备注:交流耦合电容的ESR值和容值应该很低。
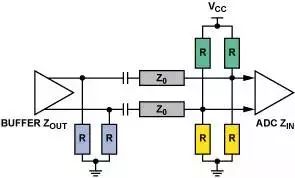
电阻桥
CMOS
优势:功耗实现合理的权衡取舍。
弱点:单端时钟用两个器件。
LVPECL

弱点:差分输出逻辑用4个外部器件。
备注:3.3V LVPECL驱动器广泛应用端接。
来源:ADI




 /5
/5 

