

Q1:机器人如何做好周期维修保养?
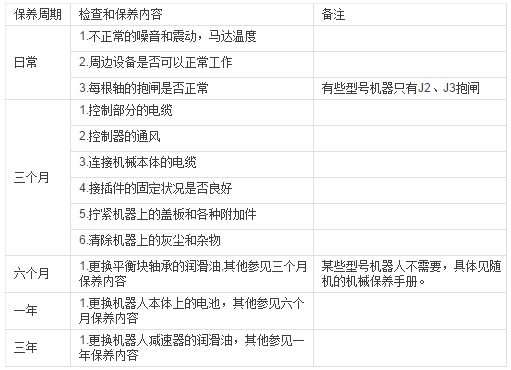
1、定期保养机器人可以延长机器人的使用寿命,保养周期可以分为日常三个月,六个月,一年,三年。以发那科的为列,具体内容如下:
Q2:什么情况下要做备份?
A:1、新机器第一次上电后。
2、在做任何修改之前。
3、在完成修改之后。
4、如果机器人重要,定期1周一次。
5、最好在U盘也做备份。
6、太旧的备份定期删除,腾出硬盘空间。
Q3:如何开始机器人的安装调试?

Q4:如何正确使用摇杆?
A:摇杆就象汽车油门一样,幅度大则机器人动作快。所以一开始要小幅度的控制摇杆使机器人运动。如果在增量模式下,则机器人动作为步进形式与幅度无关。
Q5:什么是三个重要的程序数据?
A:三个重要的程序数据是工具数据tooldata, 工件坐标数据wobjdata, 有效载荷loaddata。不正确设定会影响机器人伺服电机寿命和节拍时间。
Q6:机器人进入了急停状态怎么办?
A:当机器人进入了急停,一般请按以下的操作:急停开关复位----示教器中报警确认复位--按一下控制柜上的白色按钮。
Q7:机器人开机进入了系统故障状态怎么办?
A:1、重新启动一次机器人。
2、如果不行,在示教器查看是否有更详细的报警提示,并进行处理。
3、重启。
4、如果还不能解除则尝试B 启动。
5、如果还不行,请尝试P 启动。
6、如果还不行请尝试I 启动(这将机器人回到出厂设置状态,小心)
Q8:什么是机器人机械原点?机械原点在哪里?
A:机器人六个伺服电机都有一个唯一固定的机械原点,错误的设定机器人机械原点将会造成机器人动作受限或误动作,无法走直线等问题,严重的会损坏机器人。
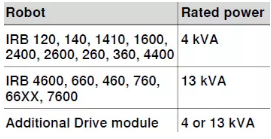
Q9:ABB 机器人的接入电源线的规格是怎么样的呢?
A:请看以下的图示:
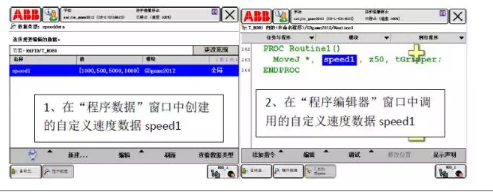
Q10:如何在RAPID 程序里自定义机器人轨迹运动的速度?
A:1、在示教器主菜单中选择程序数据。
2 、找到数据类型Speeddata 后,点击新建。
3 、点击初始值,Speeddata 四个变量含义分别为:v_tcp 表示机器人线性运行速度v_rot 表示机器人旋转运行速度,v_leax 表示外加轴线性运行速度,v_reax 表示外加轴旋转运行速度,如果没有外加轴则后两个不用修改。
4、自定义好的数据就可在RAPID 程序中进行调用了。



 /3
/3 
