
Google的无人驾驶汽车已经在道路上测试了240多万公里,此外,奔驰、宝马、福特和沃尔沃等国内外汽车厂商和众多IT公司也加入无人驾驶汽车研发队伍,并且取得了日新月异的进展。在可以预见的几年之内,将会有成熟的无人驾驶汽车产品入市。非常期待无人驾驶汽车在未来改善拥堵交通的同时,也给我们交通出行带来安全与便利。
● 无人驾驶汽车关键技术
无人驾驶汽车关键技术包括高精度地图、高精度导航系统、传感器系统、智能感知算法、车辆控制系统、高级人工智能等。然而与IT企业不同,汽车巨头均选择了更具实用性的民用智能车技术路线,在技术装置方面主要采用常规的雷达(厘米波、毫米波、超声波)、相机(立体、彩色、红外)、传感器(雷达、激光、超声波)、摄像机等进行环境感知和识别,通过基于车联网的协同式辅助驾驶技术进行智能信息交互,结合GPS导航实现路径规划,并且更加注重机电一体化系统动力学及控制技术的研发,成本低廉,便于大规模推广应用。
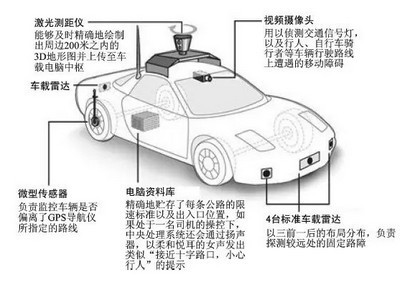
图1 典型无人驾驶汽车的结构
在国家基金委“视听觉信息的认知计算”重大研究计划推动下,国内多家无人车辆研究单位也与车企合作,研制了各具特色的原型车辆,每年都参加中国智能车未来挑战赛,部分车辆如图2所示。

图2 中国智能车未来挑战赛中的无人驾驶车辆
● 无人驾驶汽车关键技术装置水平
整车企业首先考虑的是智能化,即汽车的辅助驾驶技术,如自动泊车、车灯自动转向、安全预警等实用辅助驾驶技术,对更高层次的智能驾驶技术尚无暇顾及;IT企业关注点则侧重通信及信息服务,对先进车辆控制和安全系统的需求了解不够,在车载终端开发时与整车厂的联系不密切。先进的传感器(雷达、摄像头)、控制器芯片、执行器等核心零部件掌握在少数厂商手中,在电控单元的软硬件、系统可靠性和控制精度方面,还需要进一步提高。
无人驾驶汽车最终还是要靠整车企业来推动,通过现有的产业链整合零部件、软硬件产品,通过成熟的营销和汽车保险产品,无人驾驶汽车将会逐步进入普通用户之中。
● 无人驾驶汽车上路的挑战
(1) 精确环境感知
无人驾驶汽车的感知系统主要由相机、微波雷达和激光雷达等传感器组成。无人驾驶汽车的“眼睛”必须能够感知和识别行驶车道周边的物体,摄像头能够看到实际场景,可以辨识车道线和交通信号,检测运动目标等;激光雷达则通过激光点云来建立周边环境的3D模型,检测出车辆、行人、树木、路缘等;微波雷达用于检测运动目标,感应车身周围的移动障碍物等。最后融合成一幅如图3所示的车辆“眼睛”看到的场景。
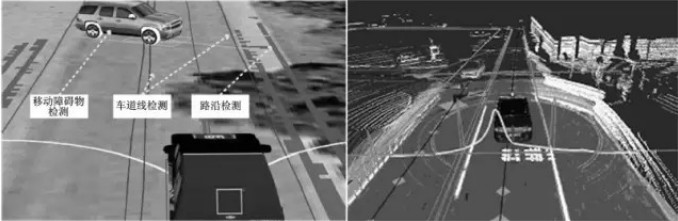
图3 无人驾驶汽车看到的场景
为什么说无人驾驶车辆环境感知那么难?因为毕竟计算机视觉还在不断发展中,要理解复杂交通环境存在不少挑战,例如司机开车过程中看到前方漂浮的塑料袋就不会刹车或者躲避,而无人驾驶汽车就需要复杂的算法来理解和识别这个场景。而且,对于每个地方的交通基础设施,不同标志的表示形式有所差异,需要进行本土化对待,计算机视觉系统才能辨识。另外在不同天气和气候情况下,针对复杂的交通环境,需要克服传感器各自的物理限制和车辆运动干扰,提高环境感知的精确程度。
无人驾驶汽车需要更安全的软件,车载软件要有足够的鲁棒性。此外,Google无人驾驶汽车对试驾场地地图进行了细化和加强,碰到障碍车辆可以轻松应对。无人驾驶汽车还需要更优秀的传感器,最好能让车辆识别出对它造成威胁的路面上的钉子和坑洞,快速判断路边行人或者汽车是否会突然进入自己的车道,并且传感器价格要控制在合理的区间。
(2) 精确状态感知
无人驾驶汽车通过“小脑”知道自己的姿态和确切位置。如图4所示,车载的高精度IMU惯性单元能够知道车辆倾斜角、横摆角和滚动角,相应轴向上的角速度、加速度等,通过车身控制系统实现车辆的稳定性控制,确保车辆“稳当”行驶。实现无人驾驶还需要通过“小脑”进行精确定位,这样才能够知道自己的确切位置,以便执行下一步驾驶任务。但是,无人驾驶汽车在这方面却面临挑战,现有的GPS捷联惯导等车载定位设备不能满足拥堵交通流中的高精度定位要求,特别是在隧道和高架桥下等交通场景中,接收不到GPS信号,无人驾驶汽车需要通过其他途径来进行定位,例如辅以SLAM、视觉导航等技术,在复杂交通环境中增强无人驾驶车辆的定位能力。
(3) 精确控制
人类驾驶员开车的时候往往基于经验操控车辆,结合实际道路情况进行车辆方向、速度的微调,由于具备了精确的感知系统,无人驾驶汽车通过“四肢”可以实现更加精确的控制。如图5所示的典型场景中,无人驾驶汽车准备执行右侧超车时,能够精确感知前车距离(d)、速度(v)、加速度(a)以及临近车道车辆的运动情况,并合理控制自身速度和方向进行换道操作。而人类驾驶员由于受限于视野等因素,在这种情况下往往很容易出现事故。
无人驾驶汽车要具备发达的“四肢”,还需要汽车厂商进一步将智能化功能与车身总线进行集成,将无人驾驶汽车控制系统中的刹车、油门及方向等模块通过汽车总线进行控制。
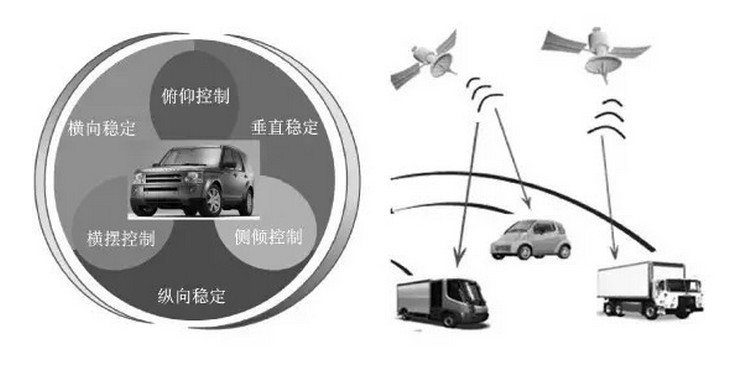
图4 无人驾驶汽车运行姿态和定位
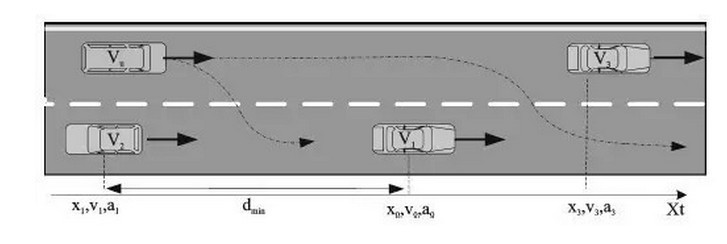
图5 结构化道路无人驾驶汽车换道超车典型场景
(4) 智能导航与决策
无人驾驶汽车的“大脑”负责导航和决策。在给定了目标任务地点之后,无人驾驶汽车要能够在路网中找到最经济、最快捷的路径,将乘客送到地点。但是在实际中,交通环境常是部分已知,可能还有障碍物临时出现/发现,必须重新规划路径。如图6所示,从A点到B点最短的道路被隔断之后,无人驾驶汽车能够重新规划路径,到达目的地。此外,道路拥堵情况也不断在发生变化,如何正确判断道路拥堵并进行正确的通行决策,对无人驾驶汽车的“大脑”智能性提出了更高的要求。

图6 无人驾驶汽车重新规划路径
由于不同国情决定了交通参与者的不同行为,使得无人驾驶汽车要具备学习与自适应能力是最具挑战性的。无人驾驶汽车发达的“大脑”,还要能遵守交通规则,在复杂交通场景下实现安全的、与人类驾驶行为类似的自主驾驶,使其不会对正常交通造成影响,同时还要保障车辆自主行驶的安全性。此外,无人驾驶汽车需要推断前后左右其他车辆的意图,处理不同驾驶员的异常行为,处理不遵守交通法规的行人、自行车和电动车等突发情况。
(5) 人工智能助力无人驾驶
无人驾驶还需要V2X无线网络、接入服务中心获得多种智能服务。通过V2X网络进行车辆之间和车路间的协同,共享数据,提高安全性。此外,人工智能技术最新突破要能尽快应用到无人驾驶上面,特别是图像识别和深度学习技术取得了突破,能够用于交通环境的感知。能够用人工智能来扩展驾驶智能,使得自主驾驶系统可以自适应调整优化,学习驾驶员行为和适应驾驶环境。
● 无人驾驶汽车测评
无人驾驶应与智能交通建设同步进行,需要建设无人驾驶车辆专用的车道、与无人驾驶车辆通信的V2X网络、无人驾驶配套的交通信号灯和交通标志。此外,需要对现有的交通系统进行智能化改造,能够支持无人驾驶车辆的智能调度、管理和控制,建立新一代智能交通系统。
为了保证新一代智能交通系统稳步构建,需要对智能车辆的驾驶安全性、舒适性、机动性、自主性进行评估,确认智能车辆具备上路资格。为了满足智能车辆发展中的上述需求,需要研究智能车辆测评方法,进而对其开展系列化、标准化的测试。所以,需要借鉴开展各种比赛时的道路区域设计,建设一个智能车辆测试基地。无人驾驶车辆可在测试基地中开展全面测试,逐步完善,通过测试方可上路。
● 无人驾驶汽车美好的应用前景
无人驾驶汽车的应用将对现有交通系统产生影响:①由于无人驾驶车辆可以共享、科学调度其驾驶路线,从而可以搭载更多乘客,同时也极大减少了停车场地需求。②由于轻量化设计,可以智能和节能地操控汽车,无人驾驶汽车更节省燃料和减少排放。③通过合理调度共享出行,减少了车辆数目;安全操控减少了交通事故;加快行驶速度,缓解了交通拥堵。④减少了人为因素引发的交通事故,无人驾驶汽车提高了交通安全。
无人驾驶车辆除了可以提升智能交通系统便利之外,还将解放驾驶员,给乘客带来便利、舒适和享受,例如,在通勤过程中还可以带来娱乐和信息服务;同时无人驾驶车辆还可以提供诸如位置服务、搜索和计算节点、大环境感知和观测、移动物流等方面的公共服务。
作者:黄武陵 来源: 嵌入式资讯精选



 /2
/2 

