来源:公众号【鱼鹰谈单片机】
作者:鱼鹰Osprey
ID :emOsprey
大家好,我是鱼鹰,因为一些事情,这次更新来的有点迟。但还是争取大家每次都能从鱼鹰公众号中学到一些实实在在的技术,提高自己的核心竞争力。
感谢大家一直以来对鱼鹰的支持 。
。
今天继续聊聊开发中常见的 HardFault,这个问题应该从学习 STM32 开发以来就一直伴随着我们,很多人遇到这种问题也是不知道该如何定位。
如果只是独立开发,遇到这种问题,一般都是看代码、修改代码等等这些常规手段,因为自己写的代码最熟悉,改动一般也不会太大,容易缩小范围,也更容易定位。
但现在的产品越来越复杂,目前的开发模式都是合作开发,每个人负责各自的模块,这样的项目代码量大、复杂度高,也就更难定位问题。
而有的时候,刚入职一家公司,什么代码都不熟悉,又出现了 HardFault,更是让人崩溃,分分钟有跑路的冲动(你和代码,有一个能跑就行 )。
)。
此时,有一个能解决这种疑难杂症的大牛是能大大节省时间的,而我在公司也解决不少类似的问题,所以经验也算丰富,充当的也是这一类角色。
而鱼鹰定位 Hardfault 的方法一般是靠 KEIL在线调试+C语言+权威指南 中的知识搞定。
目前鱼鹰的解 BUG 差不多是这样的:
1、必现,代码熟悉的情况下,几个小时内搞定。
2、偶现,根据出现情况决定解决问题的时间,一般出现个四五次,基本就能定位。
3、难现。这种一般要挂一个记录仪实时记录运行情况。
经历了这么多,已经很少有能让鱼鹰需要花费几天时间才能解决的 Hardfault 问题了(犹记得刚来深圳时,因为别人写的一个 BUG 导致的 Hardfault,不得已加了几天通宵,要不是偶然机会还不一定能搞定)。
这里打个小广告,如果难解决,可以有偿请鱼鹰解决 Hardfault 问题哦。
不过最近工作上因为用了 C++,这个基础不是很熟悉,解决 Hardfault 的速度又下降了。而工程编译优化等级 -O2 也加大了不少调试难度,因此掌握下面的方法是很重要的:
总结 MDK 几种编译优化设置的方法
关于 Hardfault,鱼鹰以前也是分享了不少笔记的,不知道有多少人认真看过。
HardFault 之 INVSTAE 错误定位(一)
见鬼,过年回来后板子就 hardfault 了?
今天,鱼鹰继续分享关于在 FreeRTOS 定位 Hardfault 方法。
这里需要一个大佬写的组件 :CmBacktrace(事实上,如果能在线调试,鱼鹰是不需要借助这个组件的,但是难复现的情况下用这个组件还是比较香的)。
gitee 仓库:https://gitee.com/Armink/CmBacktrace
这个组件估计很多道友都听说过,也用过,但鱼鹰想说的是,有些道友在用的组件可能比较老,没有下面这种追踪功能,建议大家更新一下。
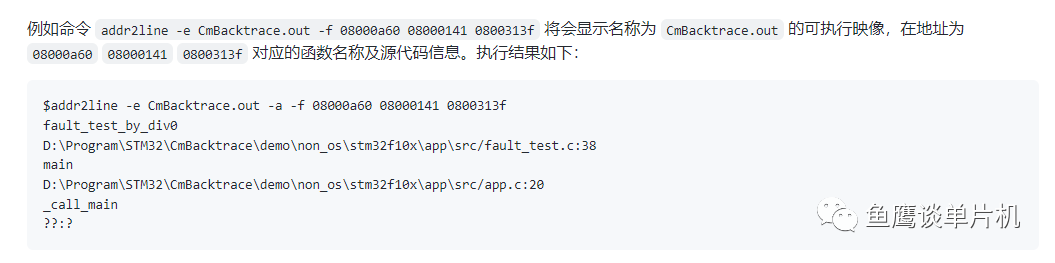
上面可以看到出错时,函数的调用栈(有时可能是错误的,需要实际分析,仅做参考)
_call_main -> main -> fult_test_by_div0
相当实用。
同时,本篇笔记不仅适用于在 FreeRTOS 定位 Hardfault,实际上uCOS、rt-thread 等其它 RTOS 照样可以修改后使用(裸机更不用说了)。
仓库例子支持的平台:裸机、rt-thread、ucoss-ii、freertos。
这里重点在如何移植这个组件到 freertos 中(实际上,仓库的说明文档也非常详细,可以参考)。由于 freertos 也是不断更新中,所以这个组件的例子不能完全适用于新版本,而鱼鹰刚好移植好了,在此记录一下,方便大家移植。
1、将仓库中的 cm_backtrace(源码文件) 整个文件夹拷贝到自己的工程文件夹下。
2、在自己的工程中添加这些文件(我们可以打开 demos -> os -> freertos 工程查看)
只有两个文件,相当简单。
一个是核心源码,另外一个则是汇编代码,代码执行入口。
注意,根据 IDE 不同,选择的汇编文件也不同:
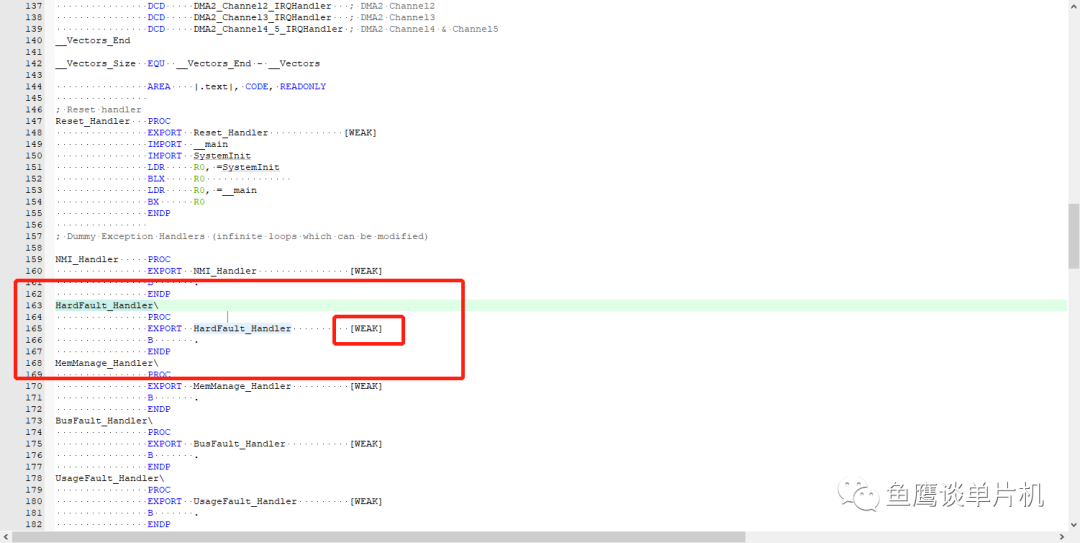
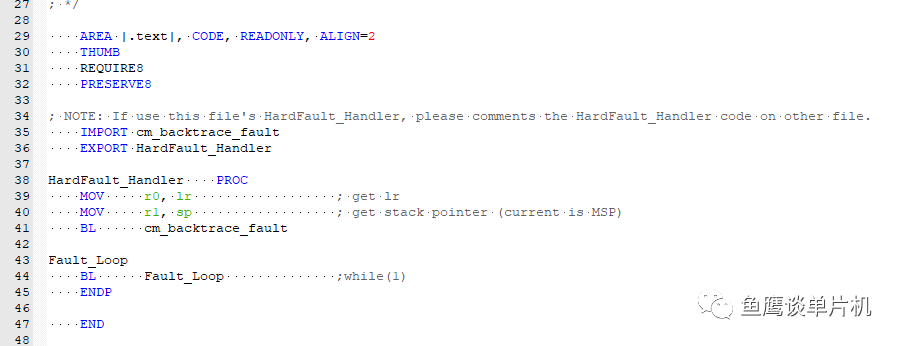
其实就是将 startup_stm32f10x_hd.s 中的hardfault 默认处理函数重定位到 cmb_fault.S 中了。
注意这里有一个weak,这样链接的时候就不会链接这个,而是 cmb_fault.S 这个:
为了更方便的定位问题,我们后面还需要修改一下这个代码才行。
注意,如果你的启动文件内的 hardfault 代码被修改了,而你不懂汇编,建议恢复成上面那种,不然可能运行不正常。
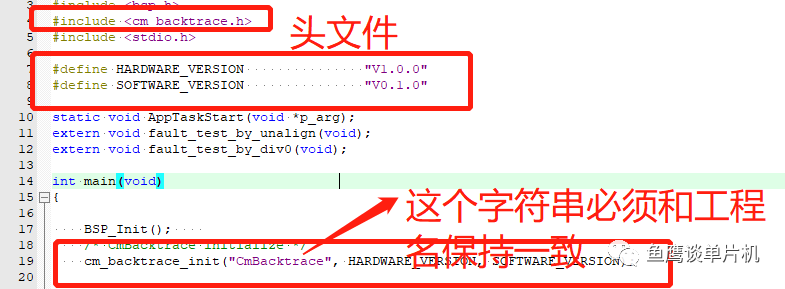
3、主函数中初始化代码。
这里的字符串需要和这个一样(根据自己的工程名修改):
所以建议用英文建工程。这个在输出错误信息的时候用的上,否则每次查看调用栈都需要修改一下,比较麻烦。
如果开启了内部看门狗,建议关闭一下:
// HAL 库__HAL_DBGMCU_FREEZE_IWDG1();// 标准库DBGMCU_Config(DBGMCU_IWDG_STOP, ENABLE);
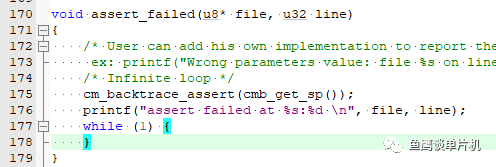
在断言失败的位置添加该函数 cm_backtrace_assert:
这样断言失败了也能看到调用栈了。
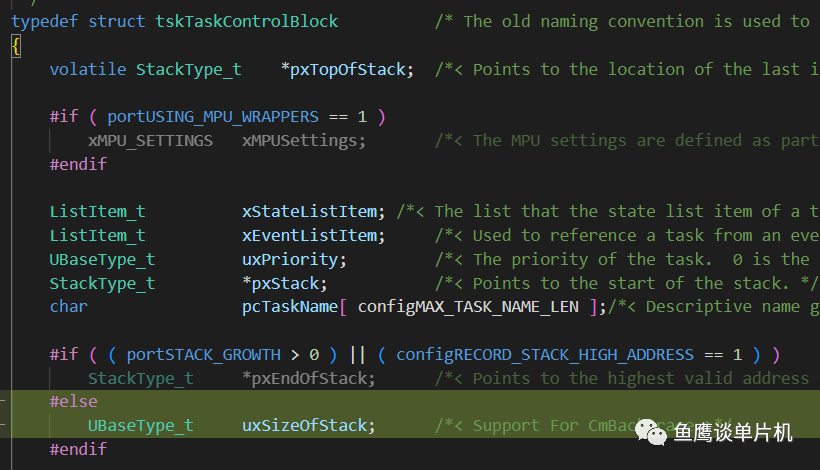
4、FreeROTS 内核文件修改(内核版本 V10.2.1)
为了分析出错的代码,必须知道每个任务的栈信息,而 FreeRTOS 可能没有这些信息,因此,我们需要添加进去。
task.c
FreeRTOS.h
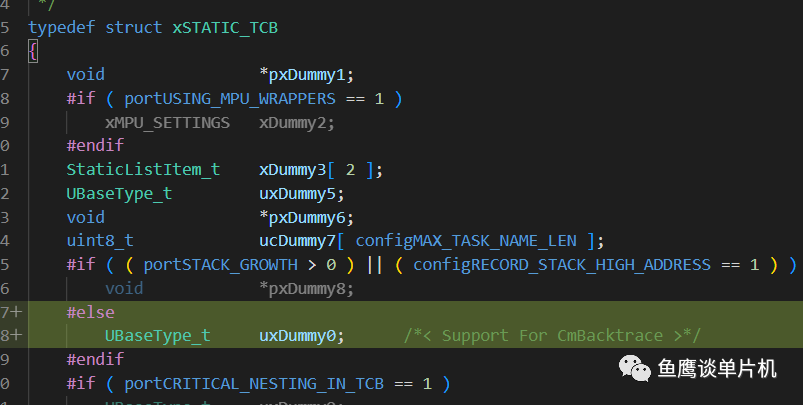
注意,老版本freertos 是只要修改一处的,但新版本需要修改两处,否则会断言失败,运行不下去。
建议把注释也一起添加进去。
UBaseType_t uxSizeOfStack; /*< Support For CmBacktrace >*/
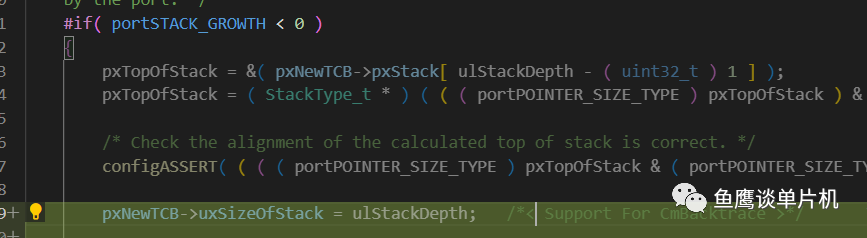
相关函数修改 task.c prvInitialiseNewTask() :
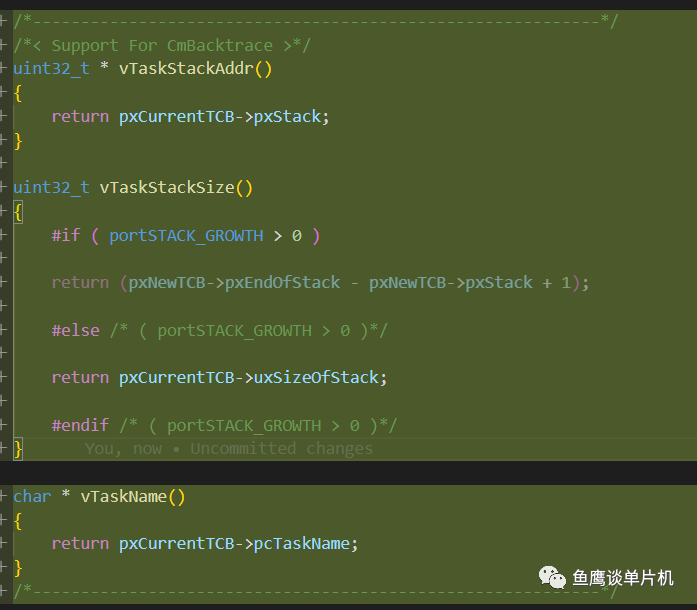
task.c 文件最后添加如下代码用于获取栈地址、大小、名字:
为方便复制,在此贴代码
/*-----------------------------------------------------------*//*< Support For CmBacktrace >*/uint32_t * vTaskStackAddr(){ return pxCurrentTCB->pxStack;} uint32_t vTaskStackSize(){ #if ( portSTACK_GROWTH > 0 ) return (pxNewTCB->pxEndOfStack - pxNewTCB->pxStack + 1); #else /* ( portSTACK_GROWTH > 0 )*/ return pxCurrentTCB->uxSizeOfStack; #endif /* ( portSTACK_GROWTH > 0 )*/} char * vTaskName(){ return pxCurrentTCB->pcTaskName;}/*-----------------------------------------------------------*/
5、根据所属 RTOS 平台和芯片内核修改组件配置信息
cmb_cfg.h
1)需要定义打印输出函数,一般用 printf 打印,也可以用你自定义的一些打印函数,功能和 printf 类似即可。
#define cmb_println(...) printf(__VA_ARGS__);printf("\r\n")
2)使能 RTOS 支持
#define CMB_USING_OS_PLATFORM
3)具体 RTOS 选择 FreeRTOS
#define CMB_OS_PLATFORM_TYPE CMB_OS_PLATFORM_FREERTOS
4)芯片内核根据实际选择,目前支持 M0、M3、M4、M7。
#define CMB_CPU_PLATFORM_TYPE CMB_CPU_ARM_CORTEX_M3
5)打印虚拟栈,可以将出错时的原始栈信息打印出来,可能对分析有些帮助
#define CMB_USING_DUMP_STACK_INFO
6)语言支持:英语。实际也支持中文,但建议使用英语(不配置,默认就是英语)
#define CMB_PRINT_LANGUAGE CMB_PRINT_LANGUAGE_ENGLISH
7) 如果是 C++ 编译的,有可能出错,可以在开头定义这个:
#define __CLANG_ARM
7、根据需要修改组件,方便使用(这些看看能不能有机会合并到大佬的分支里面)
1)因为功能涉及范围小,因此可以将相关头文件包含形式改成这种,这样就不需要改头文件路径了,移植更方便:
#include -->>#include "./cm_backtrace.h" #include -->>#include "./cmb_cfg.h" #include "cmb_def.h"-->>#include "./cmb_def.h"
main 中也不需要包含头文件,而是在需要位置直接声明这个函数即可,因为外部只需要调用这个函数
#include <cm_backtrace.h</cm_backtrace.h-->void cm_backtrace_init(const char *firmware_name, const char *hardware_ver, const char *software_ver);
这样一来,就不需要添加头文件的路径了。
或者使用相对路径的方式添加头文件:
#include "../../driver/cm_backtrace/cm_backtrace.h"
另外,我们可以让程序进入 Hardfault 前,让代码自动停止,这样我们能更好的利用在线调试代码,《 传说中的软件断点到底是什么?》。
HardFault_Handler PROC LDR r0, =0xE000EDF0; DEMCR LDR r0,[r0,#0x00] AND r0,r0,#0x00000001 CBZ r0,not_in_debug BKPT 0not_in_debug MOV r0, lr ; get lr MOV r1, sp ; get stack pointer (current is MSP) BL cm_backtrace_fault
因为刚进入 Hardfault 时的信息最全,又不想每次打断点,上面的代码很好的实现了功能,同时也不会影响程序的正常运行(会自动判断是否处于调试模式)。
8、实验。
上面都搞定了,就可以验证一下效果了。这里我们我们可以模拟仿真看看情况。(修改工程配置,这些内容鱼鹰以前分享过,不多说)
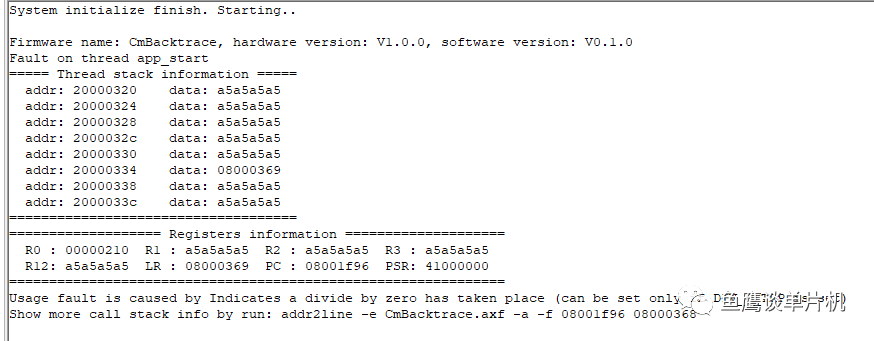
运行仓库例子后,应该能打印下面的信息,告诉我们出现了 div 0 错误
而你移植好的工程也应该打印类似的信息(加入测试代码 :fault_test_by_div0();)如果打印不出来,有两种可能:
1、打印函数没初始化好就进入了Hardfault
2、打印函数有问题。
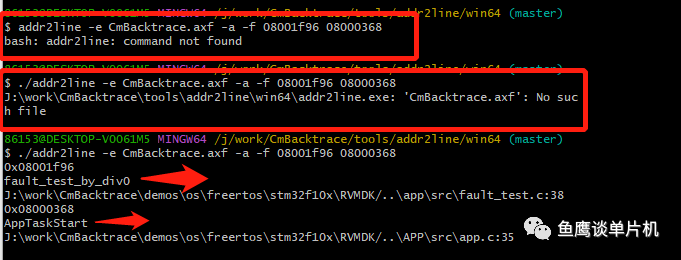
之后我们复制最后一行,然后运行仓库 tools 里面的 add2line 工具看看调用栈信息:
在 git bash 中可能会执行失败,可以加入程序路径,当然也可以将该工具路径加入到Windows 环境变量中。有可能提示找不到 axf 文件,把这个文件拷贝到工具下即可。
正确的做法是,将该工具放到 C 盘目录下,同时添加环境变量,之后就可以在 axf 目录下打开 gitbash 或者 cmd 窗口执行命令即可。
这里只作为演示,就不多介绍这些了。
最后再简单介绍一下这个组件的实现原理:
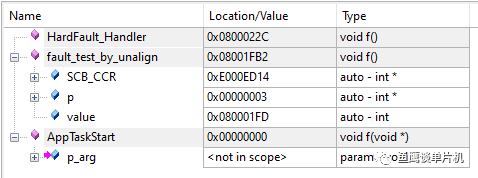
如果出现hardfault, 首先进入汇编文件的 HardFault_Handler 处理,这里会得到当前的栈指针和 LR,并且根据 LR 确定出错的栈是哪个《STM32 两个栈,你用哪一个?》(这里是 PSP 栈)
根据错误寄存器信息,确定哪种错误(这里为 除 0 错误)。
然后对栈信息 和 LR 、PC 进行 FLASH 上的汇编代码分析,找出可能的跳转指令,这里找到的两个跳转地址为 0x08001f96 0x08000368,进而得到调用栈。
因此,要能准确的得到调用栈,有两点重要前提条件(建议优化等级 -O0):
1、栈未被破坏
2、芯片运行代码和 axf 文件保持一致。
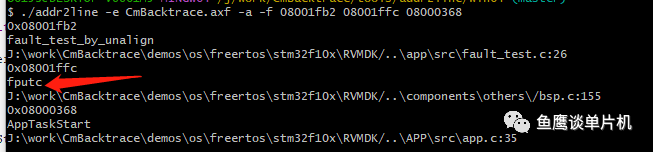
即使如此,你也不能保证找出的调用栈就是正确的,比如你使用 fault_test_by_unalign() 测试,得到的结果如下:
中间多了一个 fputc。
因此,这些打印信息只能作为参考使用。
但在线调试不同,它更专业,不容易出现错误调用关系。
鱼鹰想分享的内容到此就结束了,下期再见!
本文由编辑推荐,原出处:
https://www.eet-china.com/mp/a162225.html








 /2
/2 

