

在人工智能时代,电子机器人以前所未有的速度融入工业、服务、医疗等各个领域。从工业生产的精密操作,到医疗领域的辅助诊断;从物流配送的高效运作,到家庭服务的贴心陪伴,电子机器人极大地提高了生产效率,改善了人们的生活质量。
然而,随着应用日益广泛,电子机器人在使用过程中对静电的敏感性问题愈发突出。这主要源于技术复杂性不断提升、需适应多样环境,以及面临动态操作需求等因素。那么,该如何解决这些问题呢?上海雷卯 EMC 小哥想和大家分享一些电路设计上如何做好静电防护。
一、机器人遇到的静电问题
l 电子元件的损坏:静电放电(ESD)可能会造成电子机器人内部的半导体元件,如集成电路、芯片等永久性损坏。当静电电压超过其承受阈值时,会导致器件内部的绝缘层击穿,使电子元件无法正常工作。
l 数据错误:静电可能会干扰电子机器人的存储单元,导致存储的数据出现错误或丢失。比如,在机器人运行过程中,静电可能会使闪存中的程序代码发生改变,从而影响机器人的控制逻辑和运行性能。
l 系统故障:静电放电可能引发机器人的控制系统出现故障,导致机器人的动作异常、通信中断等问题。例如,静电可能会干扰机器人的传感器信号传输,使机器人对周围环境的感知出现偏差,进而影响其导航和操作。
l 电磁干扰:静电产生的电磁场会对电子机器人的射频电路、无线通信模块等产生干扰,降低通信质量,甚至导致通信中断。比如,在无线充电过程中,静电可能会干扰充电信号的传输,影响充电效率和稳定性。
二、电路设计静电解决措施
随着电子产品不断发展,微控制器的精密程度日益提升,这使得其对外界静电的防护要求也越来越高。尽管在制造环节,我们能通过优化环境来降低静电风险,可这仅仅是降低而已,并且在产品的使用过程中,我们没法对环境提出苛刻要求,所以对电路设计进行更为严格的静电防护就显得尤为关键,以下是一些可以有效减少电子机器人静电问题的电路设计方法:
1. 合理布局与布线设计
PCB的布局布线尤为重要,对于静电影响明显,这部分内容多细节多,这里重点概括。
合理布局:将易产生静电和对静电敏感的电路分开布局。例如,把电源电路、驱动电路等易产生干扰的部分与控制电路、传感器电路等敏感部分分隔开来,减少静电干扰的影响。
遵循分层原则:在多层电路板设计中,将电源层和接地层相邻放置,利用电源层和接地层之间的电容效应,为静电提供低阻抗的回流路径,减少静电在电路板上的积累。。
控制走线间距:保证不同信号线、电源线之间有足够的间距,避免信号线与高电压、大电流线路平行走线,以减少静电通过电磁耦合对信号线的干扰。
缩短走线:尽量缩短高频信号线和敏感信号线的长度,减少静电耦合的机会。比如,将微处理器的时钟信号线设计得尽可能短,降低静电干扰导致时钟信号失真的风险。
2. 静电释放保护电路

TVS 二极管保护:在关键的信号线路和电源线路上并联瞬态电压抑制二极管(TVS)。敏感芯片外围设计ESD防护电路(如RC滤波、钳位二极管)。当静电放电产生的瞬态高电压出现时,TVS 二极管能迅速响应,将电压钳位在一个安全值,保护电路中的其他元件不受高电压损坏。例如,在机器人的通信接口线路上安装 TVS 二极管,可有效防止静电对通信芯片的损害。
3. 传感器与接口电路设计
传感器静电防护:在传感器的输入输出端口增加静电保护电路,如采用TVS,将传感器端口的电压限制在安全范围内,防止静电损坏传感器。对于电容式传感器等易受静电影响的传感器,可在其周围设置屏蔽层,并将屏蔽层接地,减少外界静电对传感器的干扰。
接口电路优化:在机器人的外部接口,如 USB 接口、HDMI 接口等,集成专用的 ESD 保护器件。这些器件能够快速响应静电放电,将静电能量泄放掉,保护接口电路和与之相连的内部电路不受静电损害。对应网络接口、电源接口等,采用隔离变压器、光电隔离器,共模滤波等进行隔离阻碍,防止外部静电通过接口进入机器人内部电路。
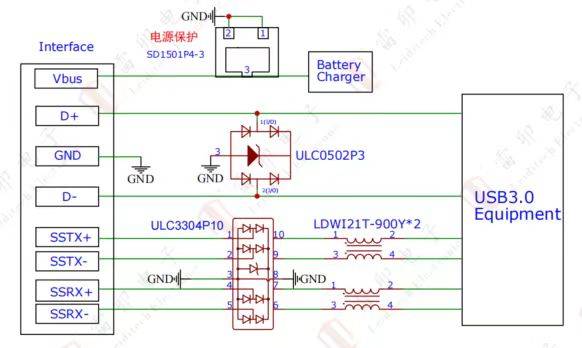
下图为上海雷卯设计UBS接口静电保护方案。其中ESD保护元件用到有SD1501P4-3,ULC0502P3,ULC3304P19,高频共模滤波LDWI21T-900Y。
“上雷卯电子”小程序收集整理常用的接口静电保护方案,其中包括了机器人常用到的,USB,RJ45,RS232/485,HDMI,WI-FI, I2C,SPI/UART,模拟输入接口,CAN 接口等。可以微信搜索参考,或联系上海雷卯EMC小哥和销售人员。
4. 滤波与去耦设计
电源滤波电路:在电源输入端设计 LC 滤波电路或 π 型滤波电路,利用电感和电容的特性,滤除电源中的高频噪声和静电脉冲,为电子机器人的各个电路模块提供稳定、纯净的电源。例如,在直流电源线上串联一个小电感,再并联一个大容量电容到地,组成 LC 滤波电路,能有效抑制电源线上的静电干扰。
去耦电容布局:在每个芯片的电源引脚附近放置多个不同容值的去耦电容,一般采用 0.1μF 和 10μF 等组合。0.1μF 的电容用于滤除高频噪声,10μF 的电容用于处理低频干扰和存储电荷,以保证芯片电源的稳定性,防止静电引起的电源波动对芯片造成影响。
5. 接地与屏蔽设计
单点接地:采用单点接地的方式,将机器人内部各个电路模块的地连接到一个公共接地点。这样可以避免不同电路模块之间的地电位差,减少静电环流的产生。
接地线路设计:确保接地线路具有足够的宽度和低电阻,以保证静电能够快速、有效地导入大地。一般来说,接地线路的宽度应根据电流大小进行合理设计,尽量减少接地电阻。
电磁屏蔽设计:对于易受静电干扰的电路模块,如射频模块、音频模块等,采用金属屏蔽罩进行屏蔽,并将屏蔽罩良好接地。屏蔽罩能够阻挡外部静电场的干扰,同时也能防止内部电路产生的静电向外辐射,提高电路的抗静电能力。
屏蔽线使用:在传输敏感信号的线路中,使用屏蔽线。例如,机器人的编码器信号线、摄像头视频线等,屏蔽线的外层金属屏蔽层接地,可以有效减少静电对信号传输的干扰,保证信号的完整性和准确性。
Leiditech雷卯电子致力于成为电磁兼容解决方案和元器件供应领导品牌,供应ESD,TVS,TSS,GDT,MOV,MOSFET,Zener,电感等产品。雷卯拥有一支经验丰富的研发团队,能够根据客户需求提供个性化定制服务,为客户提供最优质的解决方案。



 /3
/3 
