



工业机器人是一种功能完整、可独立运行的典型机电一体化设备,它有自身的控制器、驱动系统和操作界面,可对其进行手动、自动操作及编程,它能依靠自身的控制能力来实现所需要的功能。广义上的工业机器人是由如图1.1所示的机器人及相关附加设备组成的完整系统,总体可分为机械部件和电气控制系统两大部分。

图1.1工业机器人系统的组成
图1.1注解:一般驱动器和控制器等其他控制部件放到同一个柜子里,称之为控制柜。图中的操作单元指的就是示教器,由硬件和软件组成,其本身就是一个完整的计算机。工业机器人的系统组成我们可以简单地理解为三大件,如图1.2所示:工业机器人本体、控制柜(包含主计算机控制模块、轴计算机板、轴伺服驱动、 连接伺服轴编码器的SMB测量板、I/O板等)、机器人示教器(手持式操作员装置)。另外下文有关于机器人控制器操作系统的介绍:
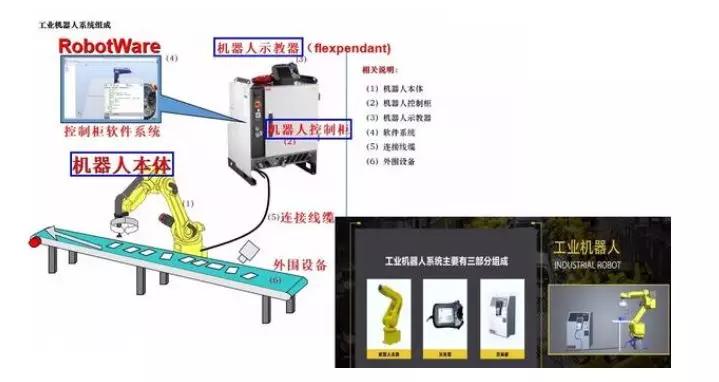
图1.2工业机器人系统的组成
ABB机器人RobotWare系列产品:RobotWare-OS:这个是机器人控制器操作系统,RobotWare-OS 为机器人基础编程和运行提供了所有必要的功能。买机器人会预装RobotWare-OS。
RobotWare选件:这个是机器人选项包,RobotWare-OS类似于Windows,而选项包类似于类似于运行在Windows上面的软件,ABB的选项包也是早就预装到控制器里面了,终端用户需要license授权才能使用。
生产应用特定工艺包:弧焊,喷涂,点胶等特定生产应用的扩展包,可以简化编程。RobotWare Add-ins可以理解为RobotWare插件,方便第三方工程师利用RobotStudio SDK开发新的功能。
基本的ABB IRC5机器人系统由机器人控制柜、示教器(FlexPendant)、工业机器人仿真软件(RobotStudio)和一个或几个机器人或其它机械单元组成。可能还有过程设备和其它的软件选项。
接下来我们就基于上面两张工业机器人系统的组成图来逐一介绍每一部分,可能还有上面两张图中未出现的部分。
二.机器人本体和执行器
机器人本体又称为操作机,它是用来完成各种作业的执行机构,包括机械部件及安装在机械部件上的驱动电机、传感器等。机器人的末端执行器又称工具,是安装在机器人手腕上的作业机构。如图2.1是ABB IBR1410型6轴工业机器人6个轴与人体类比讲解,1、2、3轴为一组;4、5、6轴为一组:
机器人的手部(第六轴上的法兰盘)用来安装末端执行器,它既可以安装类似人类的手爪,也可以安装吸盘或其他各种作业工具;腕部(第五轴)用来连接手部和小臂,起到支撑手部的作用。
三.机器人轴、基座轴(图1.1中的机器人变位器)、工装轴(工件变位机)的认识
机器人轴:机器人操作机(本体)的轴。属于机器人本身。
基座轴:机器人整体移动的轴,如行走轴(滑移平台或导轨)。
工装轴(工件变位机):机器人轴和基座轴以外的轴,是指使工件夹具翻转或回转的轴。
如图3.1所示:

图3.1基座轴与工装轴示意图
四.电气控制系统上级控制器:
上级控制器是用于机器人系统协同控制、管理的附加设备,既可用于机器人与机器人、机器人与变位器间的协同作业控制,也可用于机器人和数控机床、机器人和自动生产线上其他机电一体化设备的集中控制。此外,还可用于机器人的操作、编程与调试。它通常以网络通信的形式与机器人控制器进行信息交换,因此,实际上属于机器人电气控制系统的外部设备。
示教器简介如图4.1所示:
图4.2控制柜元件详解
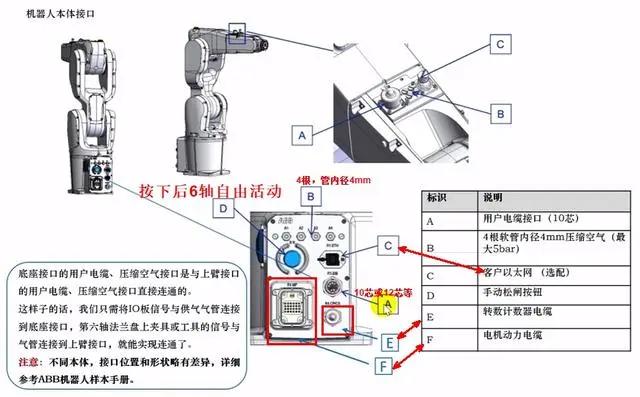
我们详细地了解到了工业机器人系统的组成:机器人本体、基座轴、工装轴;控制柜、机器人控制柜操作系统 RobotWare、示教器、工业机器人仿真软件RobotStudio;末端执行器和上级控制器等。接下来我们看看ABB机器人电缆及管路连接。我们选用的控制柜为IRC5 Compact紧凑型控制柜,机器人本体为IBR 1200,以此来讲解ABB机器人电缆及管路连接。

各种IRC5控制柜

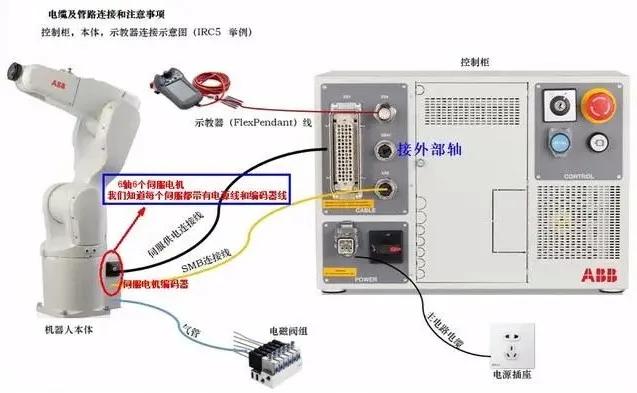
接下来我们来看一下控制柜、机器人本体、示教器的简单连接示意图:
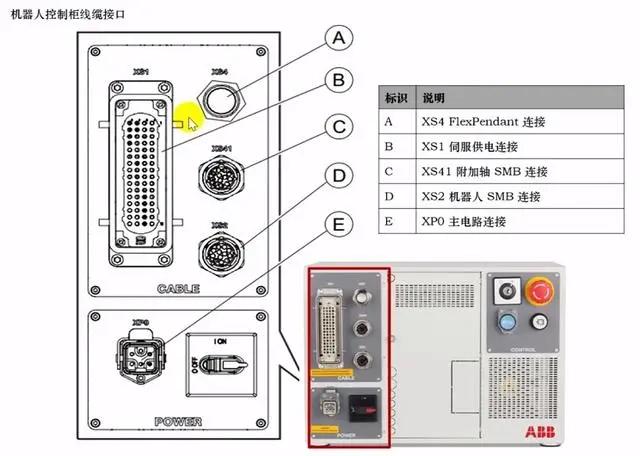
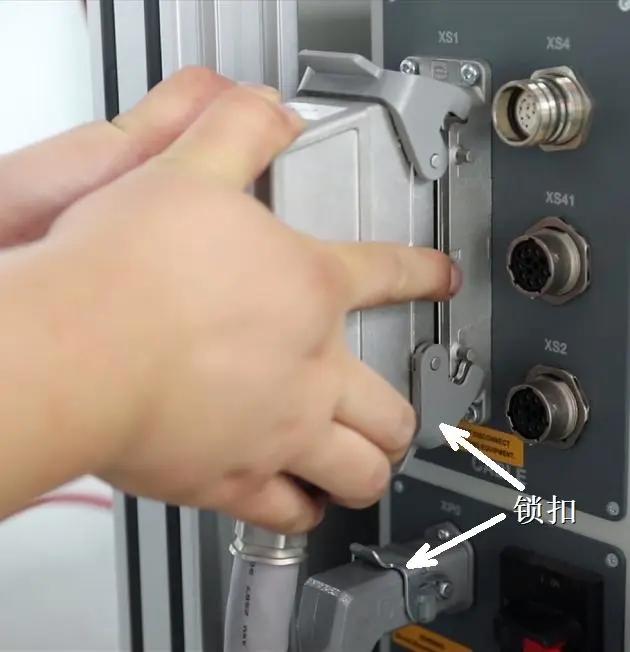
我们再来看下控制柜上接口名称及插头插法:

在插航空插的时候要注意观察凹凸对其,平齐插入,拔插顺序,心要细姿势要帅!

本文转载自海渡学院



 /2
/2 
